You might also like
- Adhami2000 Chapter PlanningAndSimulationOfRoboticDocument10 pagesAdhami2000 Chapter PlanningAndSimulationOfRoboticYessica RosasNo ratings yet
- Linu Obstacle AvoidanceDocument26 pagesLinu Obstacle Avoidanceapi-3827000100% (1)
- Elastic ForceDocument4 pagesElastic ForceAkash AcharyaNo ratings yet
- Multi-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsDocument10 pagesMulti-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsRiyaan BakhdaNo ratings yet
- Mingl I 2004Document6 pagesMingl I 2004deepkumar donNo ratings yet
- Face Recognition Using DCT - DWT Interleaved Coefficient Vectors With NN and SVM ClassifierDocument6 pagesFace Recognition Using DCT - DWT Interleaved Coefficient Vectors With NN and SVM ClassifiertheijesNo ratings yet
- Smits2020 Mechanism and Machine Theory AcceptedPrePrint CC-By-NC-NDuserlicenseDocument25 pagesSmits2020 Mechanism and Machine Theory AcceptedPrePrint CC-By-NC-NDuserlicenseZahid EscobedoNo ratings yet
- Fast 5DOF Needle Tracking in iOCTDocument10 pagesFast 5DOF Needle Tracking in iOCTxuedunNo ratings yet
- The Vector Field Histogram-Fast Obstacle Avoidance For Mobile RobotsDocument11 pagesThe Vector Field Histogram-Fast Obstacle Avoidance For Mobile RobotsShafayat AbrarNo ratings yet
- Preliminary Design and Evaluation of A Remote Tele Mentoring System For Minimally Invasive SurgeryDocument12 pagesPreliminary Design and Evaluation of A Remote Tele Mentoring System For Minimally Invasive Surgeryjackie tesilloNo ratings yet
- CH 3Document21 pagesCH 3Mohamed AhmedNo ratings yet
- A Semi-Automatic Handheld Mechatronic Endoscope With Collision-Avoidance CapabilitiesDocument6 pagesA Semi-Automatic Handheld Mechatronic Endoscope With Collision-Avoidance CapabilitiesYessica Rosas CuevasNo ratings yet
- A Novel Protection Scheme For Synchronous Generator Stator Windings Based On SVMDocument12 pagesA Novel Protection Scheme For Synchronous Generator Stator Windings Based On SVMAmsterdan Escobal TorresNo ratings yet
- FacialSurgery MMVR2005Document3 pagesFacialSurgery MMVR2005Mohamed AhmedNo ratings yet
- Analysis of Parallelogram Mechanism Used To PreserDocument12 pagesAnalysis of Parallelogram Mechanism Used To PreserEbrahim Abd El HadyNo ratings yet
- 2022 - Intraocular RoBotic Interventional System (iORBIS) Mechanical Design For Distally-Actuated Instrument Insertion and Automatic Tool ChangeDocument19 pages2022 - Intraocular RoBotic Interventional System (iORBIS) Mechanical Design For Distally-Actuated Instrument Insertion and Automatic Tool Changecjws80293No ratings yet
- 63227Document7 pages63227marlina rachmaNo ratings yet
- Sensors Management in Robotic Neurosurgery: The ROBOCAST ProjectDocument4 pagesSensors Management in Robotic Neurosurgery: The ROBOCAST Projectsekar_102No ratings yet
- IJCSESDocument27 pagesIJCSESijcsesNo ratings yet
- Obstacle AvoidanceDocument24 pagesObstacle AvoidanceShubhadeep ChowdhuryNo ratings yet
- X-Ray Guided Robotic Radiosurgery For Solid Tumors: Industrial Robot February 2001Document12 pagesX-Ray Guided Robotic Radiosurgery For Solid Tumors: Industrial Robot February 2001Alex SheldonNo ratings yet
- Hand Gesture Recognition With Body Sensor NetworksDocument4 pagesHand Gesture Recognition With Body Sensor NetworksSunil Kumar RNo ratings yet
- Gow Final Seminar ReportDocument27 pagesGow Final Seminar ReportRahul prabhaNo ratings yet
- Robotic SurgeryDocument21 pagesRobotic SurgerysayyanNo ratings yet
- Quadcopter - Obstacle Detection and Collision Avoidance: Prathamesh Salaskar, Saee Paranjpe, Jagdish Reddy, Arish ShahDocument4 pagesQuadcopter - Obstacle Detection and Collision Avoidance: Prathamesh Salaskar, Saee Paranjpe, Jagdish Reddy, Arish ShahRyan FebrianNo ratings yet
- A Novel 3D-Vision-Based Collaborative Robot As A Scope Holding System For Port Surgery - A Technical Feasibility StudyDocument8 pagesA Novel 3D-Vision-Based Collaborative Robot As A Scope Holding System For Port Surgery - A Technical Feasibility StudySunny XiongNo ratings yet
- IJETR021664Document5 pagesIJETR021664erpublicationNo ratings yet
- I Jac ST 02232013Document9 pagesI Jac ST 02232013WARSE JournalsNo ratings yet
- Oe 29 4 5006Document12 pagesOe 29 4 5006SreedharViswasNo ratings yet
- Intraocular Robotic Interventional Surgical System (IRISS) : Mechanical Design, Evaluation, and Master-Slave ManipulationDocument12 pagesIntraocular Robotic Interventional Surgical System (IRISS) : Mechanical Design, Evaluation, and Master-Slave ManipulationDaniel Bustillos VilaNo ratings yet
- 2 1 2D Visual ServoingDocument13 pages2 1 2D Visual ServoingPedro Alfonso Patlán RosalesNo ratings yet
- Computer Vision Assisted Virtual Reality Calibration: Won S. Kim, Member, IEEEDocument14 pagesComputer Vision Assisted Virtual Reality Calibration: Won S. Kim, Member, IEEEMudit BahugunaNo ratings yet
- 2021 Article 1692Document16 pages2021 Article 1692Faqih FathurrozanNo ratings yet
- Final 2Document14 pagesFinal 2Esraa AlaaNo ratings yet
- Pipeline Defect Detection Using Support Vector MachinesDocument7 pagesPipeline Defect Detection Using Support Vector MachinesduyphuocNo ratings yet
- Vision-Based Guidance and Control of A Hovering Vehicle in Unknown, GPS-denied EnvironmentsDocument6 pagesVision-Based Guidance and Control of A Hovering Vehicle in Unknown, GPS-denied Environmentsp_p9No ratings yet
- CarnighanICRA2004197 WE-10 3Document6 pagesCarnighanICRA2004197 WE-10 3baixiu0813No ratings yet
- Three-Dimensional Robotic-Assisted Endomicroscopy With A Force Adaptive Robotic ArmDocument6 pagesThree-Dimensional Robotic-Assisted Endomicroscopy With A Force Adaptive Robotic ArmJames BenavidesNo ratings yet
- ABSTRACTDocument5 pagesABSTRACTvaralakshmi01No ratings yet
- Neural-Learning-Based Telerobot Control With Guaranteed PerformanceDocument12 pagesNeural-Learning-Based Telerobot Control With Guaranteed PerformanceDanilo Carvajal MarinNo ratings yet
- Development and Experimental Validation of An Adaptive Extended Kalman Filter For The Localization of Mobile RobotsDocument11 pagesDevelopment and Experimental Validation of An Adaptive Extended Kalman Filter For The Localization of Mobile RobotsAnderson OliveiraNo ratings yet
- Collaborative Surgical RobotsDocument16 pagesCollaborative Surgical RobotsKirtan BhojakNo ratings yet
- A GPU Sub-Pixel Algorithm For Autostereoscopic Virtual RealityDocument7 pagesA GPU Sub-Pixel Algorithm For Autostereoscopic Virtual RealityeGzoNo ratings yet
- TAM-Net Temporal Enhanced Appearance-to-Motion Generative Network For Video Anomaly DetectionDocument8 pagesTAM-Net Temporal Enhanced Appearance-to-Motion Generative Network For Video Anomaly DetectionAreej AhmadNo ratings yet
- New Approach To Similarity Detection by Combining Technique Three-Patch Local Binary Patterns (TP-LBP) With Support Vector MachineDocument10 pagesNew Approach To Similarity Detection by Combining Technique Three-Patch Local Binary Patterns (TP-LBP) With Support Vector MachineIAES IJAINo ratings yet
- Elysium Technologies Private Limited: Bio - MedicalDocument6 pagesElysium Technologies Private Limited: Bio - MedicalMuthumari AyyakannuNo ratings yet
- 04-05-2021-1620114032-6-Ijme-4. Ijme - Vision Based Modelling of The Robotic Work CellDocument6 pages04-05-2021-1620114032-6-Ijme-4. Ijme - Vision Based Modelling of The Robotic Work Celliaset123No ratings yet
- Base PapDocument6 pagesBase PapAnonymous ovq7UE2WzNo ratings yet
- Concealed Weapon Detection Using Digital Image Processing: AbstractDocument11 pagesConcealed Weapon Detection Using Digital Image Processing: AbstractrevarocksNo ratings yet
- A Visual 3d-Tracking and Positioning Technique For Stereotaxy With CT ScannersDocument11 pagesA Visual 3d-Tracking and Positioning Technique For Stereotaxy With CT Scannershectorkevin2008No ratings yet
- 1 s2.0 S0006349517304411 mmc2 PDFDocument21 pages1 s2.0 S0006349517304411 mmc2 PDFBrandon LEeNo ratings yet
- File 6154Document13 pagesFile 6154Aleh KannonNo ratings yet
- ConcealedweapondetectionDocument13 pagesConcealedweapondetectionKalyani BhamidipatiNo ratings yet
- Survey of Vision-Based Robot Control: Ezio Malis INRIA, Sophia Antipolis, France, Ezio - Malis@Document16 pagesSurvey of Vision-Based Robot Control: Ezio Malis INRIA, Sophia Antipolis, France, Ezio - Malis@Saran CoolNo ratings yet
- Icra 17 MedicalDocument7 pagesIcra 17 MedicalVõ TuấnNo ratings yet
- An Error Compensation Method For Surgical Robot BaDocument12 pagesAn Error Compensation Method For Surgical Robot BaAbdulkareem 99No ratings yet
- Automatic Tracking Measurement System On Human Lumbar Vertebral MotionDocument4 pagesAutomatic Tracking Measurement System On Human Lumbar Vertebral MotionebrahimpanNo ratings yet
- Extrinsic Parameters Calibration Method of Cameras PDFDocument18 pagesExtrinsic Parameters Calibration Method of Cameras PDFghaiethNo ratings yet
- ControladoresDocument19 pagesControladoresJesus HuamaniNo ratings yet
- United College of Engineering & Research, Prayagraj: Department of Information TechnologyDocument17 pagesUnited College of Engineering & Research, Prayagraj: Department of Information Technology4MH18CS086 Rakesh Mallika SNo ratings yet
- Continous Monitoring of Conservatory Using Iot and Crop Recommendation Using Ai/MlDocument16 pagesContinous Monitoring of Conservatory Using Iot and Crop Recommendation Using Ai/Ml4MH18CS086 Rakesh Mallika SNo ratings yet
- Intrusion Detection SystemDocument20 pagesIntrusion Detection System4MH18CS086 Rakesh Mallika SNo ratings yet
- Binoo E Waste ManagementDocument11 pagesBinoo E Waste Management4MH18CS086 Rakesh Mallika SNo ratings yet
- Frictionless Bearing TSDocument16 pagesFrictionless Bearing TS4MH18CS086 Rakesh Mallika SNo ratings yet
- Tplink Eap110 Qig EngDocument20 pagesTplink Eap110 Qig EngMaciejNo ratings yet
- Hamstring - WikipediaDocument21 pagesHamstring - WikipediaOmar MarwanNo ratings yet
- From Philo To Plotinus AftermanDocument21 pagesFrom Philo To Plotinus AftermanRaphael888No ratings yet
- Theories of International InvestmentDocument2 pagesTheories of International InvestmentSamish DhakalNo ratings yet
- 8.ZXSDR B8200 (L200) Principle and Hardware Structure Training Manual-45Document45 pages8.ZXSDR B8200 (L200) Principle and Hardware Structure Training Manual-45mehdi_mehdiNo ratings yet
- Business Analytics Emphasis Course GuideDocument3 pagesBusiness Analytics Emphasis Course Guidea30000496No ratings yet
- 13 Adsorption of Congo Red A Basic Dye by ZnFe-CO3Document10 pages13 Adsorption of Congo Red A Basic Dye by ZnFe-CO3Jorellie PetalverNo ratings yet
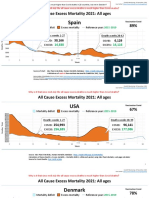
- Countries EXCESS DEATHS All Ages - 15nov2021Document21 pagesCountries EXCESS DEATHS All Ages - 15nov2021robaksNo ratings yet
- Lesson 6 ComprogDocument25 pagesLesson 6 ComprogmarkvillaplazaNo ratings yet
- Salads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDocument1,092 pagesSalads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDebora PanzarellaNo ratings yet
- Stearns 87700 Series Parts ListDocument4 pagesStearns 87700 Series Parts ListYorkistNo ratings yet
- 15.053/8 February 7, 2013: More Linear and Non-Linear Programming ModelsDocument42 pages15.053/8 February 7, 2013: More Linear and Non-Linear Programming ModelsShashank SinglaNo ratings yet
- Study 107 - The Doctrine of Salvation - Part 8Document2 pagesStudy 107 - The Doctrine of Salvation - Part 8Jason MyersNo ratings yet
- Activity # 1 (DRRR)Document2 pagesActivity # 1 (DRRR)Juliana Xyrelle FutalanNo ratings yet
- Project - New Restuarant Management System The Grill HouseDocument24 pagesProject - New Restuarant Management System The Grill HouseMayank Mahajan100% (3)
- Stress-Strain Modelfor Grade275 Reinforcingsteel With Cyclic LoadingDocument9 pagesStress-Strain Modelfor Grade275 Reinforcingsteel With Cyclic LoadingRory Cristian Cordero RojoNo ratings yet
- Analizador de Combustion Kigaz 310 Manual EngDocument60 pagesAnalizador de Combustion Kigaz 310 Manual EngJully Milagros Rodriguez LaicheNo ratings yet
- Working Capital in YamahaDocument64 pagesWorking Capital in YamahaRenu Jindal50% (2)
- Working With Difficult People Online WorksheetDocument4 pagesWorking With Difficult People Online WorksheetHugh Fox IIINo ratings yet
- Organization and Management Module 3: Quarter 1 - Week 3Document15 pagesOrganization and Management Module 3: Quarter 1 - Week 3juvelyn luegoNo ratings yet
- Duavent Drug Study - CunadoDocument3 pagesDuavent Drug Study - CunadoLexa Moreene Cu�adoNo ratings yet
- Arens - Auditing and Assurance Services 15e-2Document17 pagesArens - Auditing and Assurance Services 15e-2Magdaline ChuaNo ratings yet
- Prelim Examination MaternalDocument23 pagesPrelim Examination MaternalAaron ConstantinoNo ratings yet
- The JHipster Mini Book 2Document129 pagesThe JHipster Mini Book 2tyulist100% (1)
- Guidelines For SKPMG2 TSSP - Draft For Consultation 10.10.17Document5 pagesGuidelines For SKPMG2 TSSP - Draft For Consultation 10.10.17zqhnazNo ratings yet
- Hima OPC Server ManualDocument36 pagesHima OPC Server ManualAshkan Khajouie100% (3)
- Chapter 13 Exercises With AnswerDocument5 pagesChapter 13 Exercises With AnswerTabitha HowardNo ratings yet
- Work ProblemsDocument19 pagesWork ProblemsOfelia DavidNo ratings yet
- 11-03 TB Value Chains and BPs - WolfDocument3 pages11-03 TB Value Chains and BPs - WolfPrakash PandeyNo ratings yet
- Opc PPT FinalDocument22 pagesOpc PPT FinalnischalaNo ratings yet