You might also like
- Mutual Fund Insight Jul 2023Document104 pagesMutual Fund Insight Jul 2023Ram Yadav100% (1)
- Serial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsFrom EverandSerial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsRating: 3.5 out of 5 stars3.5/5 (9)
- Comment To Demurrer To The EvidenceDocument4 pagesComment To Demurrer To The EvidenceRalph Valdez100% (1)
- ARINC 615A and 665-3 Based Data Loader For AircraftsDocument6 pagesARINC 615A and 665-3 Based Data Loader For Aircraftsvijaykumar ponugotiNo ratings yet
- Avionics ArchitectureDocument91 pagesAvionics Architecturecalinshabu100% (4)
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- Module 10 MCQ (Aviation Legislation) - 20170316-163430324Document5 pagesModule 10 MCQ (Aviation Legislation) - 20170316-163430324Jimmy HaddadNo ratings yet
- Implementation of An Afdx Interface With Zynq Soc Board in FpgaDocument5 pagesImplementation of An Afdx Interface With Zynq Soc Board in Fpgavijaykumar ponugotiNo ratings yet
- Go Mac PapDocument5 pagesGo Mac Papsyedsalman1984No ratings yet
- Avionics 1 PDFDocument4 pagesAvionics 1 PDFSpeck MalacaraNo ratings yet
- NASA: z04 1810Document9 pagesNASA: z04 1810NASAdocumentsNo ratings yet
- Developing AFDX Solutions: ARINC 429Document18 pagesDeveloping AFDX Solutions: ARINC 429k_goulasNo ratings yet
- Afdx Flight TestDocument4 pagesAfdx Flight TestmadeiniitNo ratings yet
- Impact of End System Scheduling Policies On AFDX Performance in Avionic On-Board Data NetworkDocument6 pagesImpact of End System Scheduling Policies On AFDX Performance in Avionic On-Board Data Networkvijaykumar ponugotiNo ratings yet
- An Emulation Model For Embedded Networks Used in Avionics: AbstractDocument6 pagesAn Emulation Model For Embedded Networks Used in Avionics: Abstractvijaykumar ponugotiNo ratings yet
- Arinc 629Document5 pagesArinc 629ericocheNo ratings yet
- WSN of DefenceDocument5 pagesWSN of DefenceTuanvnair TuanvnairNo ratings yet
- Radio Navigation Maintenance ProceduresDocument4 pagesRadio Navigation Maintenance Proceduresame_ravisinghNo ratings yet
- GPS-based Vehicle Tracking System-on-Chip: Adnan I. Yaqzan, Issam W. Damaj, and Rached N. ZantoutDocument6 pagesGPS-based Vehicle Tracking System-on-Chip: Adnan I. Yaqzan, Issam W. Damaj, and Rached N. ZantoutZara BhakriNo ratings yet
- Design of Tele Command SOC-IP by AES Cryptographic Method Using VHDLDocument4 pagesDesign of Tele Command SOC-IP by AES Cryptographic Method Using VHDLdbpublicationsNo ratings yet
- PXC 3895968 TheevolutionofaircraftdatanetworksDocument7 pagesPXC 3895968 Theevolutionofaircraftdatanetworksserdar.karamanNo ratings yet
- 2004 - Airbus - A380 - An Afdx Based Flight Test Computer - Autest.2004.1436931 PDFDocument4 pages2004 - Airbus - A380 - An Afdx Based Flight Test Computer - Autest.2004.1436931 PDFHakan SolmazNo ratings yet
- Integrated Modular AvionicsDocument20 pagesIntegrated Modular Avionicsame_ravisingh100% (1)
- A New Approach For Distributed Computing in Avionics SystemsDocument6 pagesA New Approach For Distributed Computing in Avionics SystemsMasuda AkterNo ratings yet
- Avionics Full-Duplex Switched Ethernet: HistoryDocument6 pagesAvionics Full-Duplex Switched Ethernet: Historyvijaykumar ponugotiNo ratings yet
- Afdx White PaperDocument20 pagesAfdx White PaperbaburaokodavatiNo ratings yet
- Transfer of Advanced Asaac SW Technology Onto The Eurofighter/TyphoonDocument5 pagesTransfer of Advanced Asaac SW Technology Onto The Eurofighter/TyphoonQuân LêNo ratings yet
- Learning Material Unit 3,4Document34 pagesLearning Material Unit 3,4J.Gowri ShankarNo ratings yet
- Gateway Design For Data Gathering Sensor Networks: Raluca Mus Aloiu-E. R Azvan Mus Aloiu-E. Andreas TerzisDocument9 pagesGateway Design For Data Gathering Sensor Networks: Raluca Mus Aloiu-E. R Azvan Mus Aloiu-E. Andreas TerzisSachin T MNo ratings yet
- Satya Ieeetc Coda 1990Document13 pagesSatya Ieeetc Coda 1990Dom DeSiciliaNo ratings yet
- Flying Ad-Hoc Networks (Fanets) : A Review of Communication Architectures, and Routing ProtocolsDocument10 pagesFlying Ad-Hoc Networks (Fanets) : A Review of Communication Architectures, and Routing Protocolspurushottam.k.mNo ratings yet
- Performance Analysis of Short Distance Wireless Sensor Networks Using MoteviewDocument6 pagesPerformance Analysis of Short Distance Wireless Sensor Networks Using MoteviewMehboob Ul HaqNo ratings yet
- Testing Aircraft AFDX SystemsDocument2 pagesTesting Aircraft AFDX SystemslokeshbnNo ratings yet
- A Hardware Software WSN Platform Rojas Barrett Issc 2017Document6 pagesA Hardware Software WSN Platform Rojas Barrett Issc 2017ajaz ahmedNo ratings yet
- A Hardware Software WSN Platform Rojas Barrett Issc 2017 PDFDocument6 pagesA Hardware Software WSN Platform Rojas Barrett Issc 2017 PDFRamsha KhanNo ratings yet
- Adaptive Neural Fuzzy Interface System For Cloud ComputingDocument5 pagesAdaptive Neural Fuzzy Interface System For Cloud Computingmohan vamsiNo ratings yet
- Performance Evaluation of Unmanned Aerial Vehicle Ad Hoc NetworksDocument4 pagesPerformance Evaluation of Unmanned Aerial Vehicle Ad Hoc NetworksJehanzeb KayaniNo ratings yet
- Scaling Star-Coupler-Based Optical Networks For Avionics ApplicationsDocument12 pagesScaling Star-Coupler-Based Optical Networks For Avionics ApplicationsqwentionNo ratings yet
- Frequency Spectrum For New Aviation Data Links: Initial Study ResultsDocument51 pagesFrequency Spectrum For New Aviation Data Links: Initial Study Resultsstanpjames2309No ratings yet
- Performance Based Network Concept For Advanced Air Traffic ServicesDocument5 pagesPerformance Based Network Concept For Advanced Air Traffic Servicesxinyingli0211No ratings yet
- Rough Reor 2022sDocument5 pagesRough Reor 2022sAndrew MisianiNo ratings yet
- Design and Implementation of A UCA-based Substation Control SystemDocument8 pagesDesign and Implementation of A UCA-based Substation Control Systemsupachaik6151No ratings yet
- Enhanced Ids For Manet: Keywords: Wireless Networks, Manet, Intrusion Detection, AcknowledgementsDocument6 pagesEnhanced Ids For Manet: Keywords: Wireless Networks, Manet, Intrusion Detection, AcknowledgementsReddy SumanthNo ratings yet
- Ons2014 Paper Schulz ZanderDocument2 pagesOns2014 Paper Schulz ZanderBoopathy PandiNo ratings yet
- Spacevpxfmc For Electronics Standardization and Modularity in High-Performance Smallsat ArchitecturesDocument8 pagesSpacevpxfmc For Electronics Standardization and Modularity in High-Performance Smallsat ArchitecturesLeandro GagliardiNo ratings yet
- Physical Layer.: Vamsi Krishna Data Networks and Infrastructure HW Assignment 1Document8 pagesPhysical Layer.: Vamsi Krishna Data Networks and Infrastructure HW Assignment 1Vamsi KrishnaNo ratings yet
- Software Defined RadioDocument28 pagesSoftware Defined RadioClassic PrintersNo ratings yet
- Fdocuments - in - Vtu 8th Sem Cse Adhoc Networks Notes 10cs841 Vtunotesbysree PDFDocument66 pagesFdocuments - in - Vtu 8th Sem Cse Adhoc Networks Notes 10cs841 Vtunotesbysree PDFMelwinNo ratings yet
- Modeling and Simulation of Avionics Full Duplex Switched Ethernet (AFDX Network) Based On OPNETDocument4 pagesModeling and Simulation of Avionics Full Duplex Switched Ethernet (AFDX Network) Based On OPNETvijaykumar ponugotiNo ratings yet
- Ijirt147527 PaperDocument6 pagesIjirt147527 PaperPI CubingNo ratings yet
- Digitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnDocument10 pagesDigitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - Lincolnvijaykumar ponugotiNo ratings yet
- Government Engineering College K .R Pet: "A 3D Smooth Random Walk Mobility Model For Fanets"Document13 pagesGovernment Engineering College K .R Pet: "A 3D Smooth Random Walk Mobility Model For Fanets"Preethu GowdaNo ratings yet
- Training On Network: PREPARED BY: Vishal BediDocument141 pagesTraining On Network: PREPARED BY: Vishal BedidsmehlawatNo ratings yet
- ISM Assignment 2 Shubham Mallick 2185044Document9 pagesISM Assignment 2 Shubham Mallick 2185044ShubhamNo ratings yet
- Ieee Iccic PaperDocument6 pagesIeee Iccic PaperBharathNo ratings yet
- Network Model Analysis in Opnet Simulation: Electronic Transfer of Data and or InformationDocument5 pagesNetwork Model Analysis in Opnet Simulation: Electronic Transfer of Data and or InformationsanketNo ratings yet
- Wireless Digital SensorDocument4 pagesWireless Digital SensorFerdinand AsihNo ratings yet
- Airborne Internet: M.P.Shalimath Nasli Ketaki Dattatray Gavhane Dubbal Gazala Parveen Abdul Munaf. Department ofDocument6 pagesAirborne Internet: M.P.Shalimath Nasli Ketaki Dattatray Gavhane Dubbal Gazala Parveen Abdul Munaf. Department ofAvs PavanNo ratings yet
- Security Architecture For Aeronautical Networks: Student: Younes ENNAJJAR Supervisor: Pr. Anas Abou El KalamDocument24 pagesSecurity Architecture For Aeronautical Networks: Student: Younes ENNAJJAR Supervisor: Pr. Anas Abou El KalamEnnajjarPRoNo ratings yet
- A Gazebo-ROS Based Communiaction-Realistic Simulator For Networked sUASDocument9 pagesA Gazebo-ROS Based Communiaction-Realistic Simulator For Networked sUASAK GamsNo ratings yet
- From Reconfigurable Architectures To Self-Adaptive Autonomic SystemsDocument7 pagesFrom Reconfigurable Architectures To Self-Adaptive Autonomic SystemsLucas Gabriel CasagrandeNo ratings yet
- Technical Seminar Asif PDFDocument43 pagesTechnical Seminar Asif PDFSudheer GoudNo ratings yet
- IO-Link Wireless Enhanced Sensors and Actuators For Industry 4.0 NetworksDocument5 pagesIO-Link Wireless Enhanced Sensors and Actuators For Industry 4.0 NetworksJonathan HopkinsNo ratings yet
- NAVEDTRA 14224 Information Systems Technician Training Series, Module 03 - Network CommunicationsDocument64 pagesNAVEDTRA 14224 Information Systems Technician Training Series, Module 03 - Network Communicationshackbrian003No ratings yet
- A Feasible Configuration of AFDX Networks For Real-Time Flows in Avionics SystemsDocument6 pagesA Feasible Configuration of AFDX Networks For Real-Time Flows in Avionics Systemsvijaykumar ponugotiNo ratings yet
- Modeling and Simulation of Avionics Full Duplex Switched Ethernet (AFDX Network) Based On OPNETDocument4 pagesModeling and Simulation of Avionics Full Duplex Switched Ethernet (AFDX Network) Based On OPNETvijaykumar ponugotiNo ratings yet
- Performance Analysis of AFDX Switch For Space On-Board Data NetworksDocument12 pagesPerformance Analysis of AFDX Switch For Space On-Board Data Networksvijaykumar ponugotiNo ratings yet
- Calc As A Simple DatabaseDocument27 pagesCalc As A Simple Databasevijaykumar ponugotiNo ratings yet
- Ug475 7series PKG PinoutDocument350 pagesUg475 7series PKG Pinoutvijaykumar ponugotiNo ratings yet
- Research Article: Optimal Configuration of Virtual Links For Avionics Network SystemsDocument10 pagesResearch Article: Optimal Configuration of Virtual Links For Avionics Network Systemsvijaykumar ponugotiNo ratings yet
- Improving The Worst-Case Delay Analysis of An AFDX Network Using An Optimized Trajectory ApproachDocument13 pagesImproving The Worst-Case Delay Analysis of An AFDX Network Using An Optimized Trajectory Approachvijaykumar ponugotiNo ratings yet
- 05-27 RtsaDocument134 pages05-27 Rtsavijaykumar ponugotiNo ratings yet
- End System A664 Rugged (PMC) : The Ruggedized 10/100/1000 Mbit/S Ttethernet Network BoardDocument2 pagesEnd System A664 Rugged (PMC) : The Ruggedized 10/100/1000 Mbit/S Ttethernet Network Boardvijaykumar ponugotiNo ratings yet
- Avionics 020918 R2Document57 pagesAvionics 020918 R2vijaykumar ponugotiNo ratings yet
- Digitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnDocument10 pagesDigitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - Lincolnvijaykumar ponugotiNo ratings yet
- SNMP Research - SNMP RFCsDocument2 pagesSNMP Research - SNMP RFCsvijaykumar ponugotiNo ratings yet
- Picozed 7Z015 / 7Z030 Som: (System-On Module)Document34 pagesPicozed 7Z015 / 7Z030 Som: (System-On Module)vijaykumar ponugotiNo ratings yet
- F-Sim-Ldr Arinc 615A SDK User's ManualDocument49 pagesF-Sim-Ldr Arinc 615A SDK User's Manualvijaykumar ponugotiNo ratings yet
- Impact of End System Scheduling Policies On AFDX Performance in Avionic On-Board Data NetworkDocument6 pagesImpact of End System Scheduling Policies On AFDX Performance in Avionic On-Board Data Networkvijaykumar ponugotiNo ratings yet
- An Emulation Model For Embedded Networks Used in Avionics: AbstractDocument6 pagesAn Emulation Model For Embedded Networks Used in Avionics: Abstractvijaykumar ponugotiNo ratings yet
- SNMP Jmanager: An Open Source Didactic Application For Teaching and Learning SNMP V1/2C/3 With Support For Ipv4 and Ipv6Document11 pagesSNMP Jmanager: An Open Source Didactic Application For Teaching and Learning SNMP V1/2C/3 With Support For Ipv4 and Ipv6vijaykumar ponugotiNo ratings yet
- An Approach To Conformance Testing of MIB ImplemenDocument13 pagesAn Approach To Conformance Testing of MIB Implemenvijaykumar ponugotiNo ratings yet
- Avionics Full-Duplex Switched Ethernet: HistoryDocument6 pagesAvionics Full-Duplex Switched Ethernet: Historyvijaykumar ponugotiNo ratings yet
- Network Management (SNMP)Document17 pagesNetwork Management (SNMP)vijaykumar ponugotiNo ratings yet
- Electronics: Fficient Time-Sensitive Networking Ffic Scheduling Method For Industrial ScenariosDocument19 pagesElectronics: Fficient Time-Sensitive Networking Ffic Scheduling Method For Industrial Scenariosvijaykumar ponugotiNo ratings yet
- Factors For Choosing An Soc Fpga: Architecture BriefDocument4 pagesFactors For Choosing An Soc Fpga: Architecture Briefvijaykumar ponugotiNo ratings yet
- Mixed-Criticality On The AFDX Network: Challenges and Potential SolutionsDocument9 pagesMixed-Criticality On The AFDX Network: Challenges and Potential Solutionsvijaykumar ponugotiNo ratings yet
- Electronics: Fficient Time-Sensitive Networking Ffic Scheduling Method For Industrial ScenariosDocument19 pagesElectronics: Fficient Time-Sensitive Networking Ffic Scheduling Method For Industrial Scenariosvijaykumar ponugotiNo ratings yet
- IFRS 2 (December 2014)Document2 pagesIFRS 2 (December 2014)احمد حمادةNo ratings yet
- Versuri Muzica Anii 80 - 90Document25 pagesVersuri Muzica Anii 80 - 90Mia DutuNo ratings yet
- The Acoustic Emission Monitoring System of Aboveground Storage TanksDocument8 pagesThe Acoustic Emission Monitoring System of Aboveground Storage TanksGonzalo TelleríaNo ratings yet
- Rogelio Andres Gonzalez - Task 2 Solving Problems of Decision Models Under RisksDocument36 pagesRogelio Andres Gonzalez - Task 2 Solving Problems of Decision Models Under RisksKirito LunaNo ratings yet
- Service Manual: LC-42D64U LC-46D64U LC-52D64UDocument172 pagesService Manual: LC-42D64U LC-46D64U LC-52D64UsanasarNo ratings yet
- Material Safety Data Sheet: Oxygen ControlDocument6 pagesMaterial Safety Data Sheet: Oxygen ControlJezrell JaravataNo ratings yet
- The Act of Proclamation of The Independence of The Filipino PeopleDocument33 pagesThe Act of Proclamation of The Independence of The Filipino PeopleJULIANA RAE CONTRERASNo ratings yet
- Reserch Paper SanjhiDocument5 pagesReserch Paper SanjhiMadhu Bala SinghNo ratings yet
- Geopolitics in Contemporary World PDFDocument30 pagesGeopolitics in Contemporary World PDFHabib EjazNo ratings yet
- 2011 Heiber PV Int Review Diamond Wire Wafering Technology Meyer BurgerDocument9 pages2011 Heiber PV Int Review Diamond Wire Wafering Technology Meyer BurgerBeyza Nur AKBOLATNo ratings yet
- Gillvvvvvvvvvvvvvvvvvv PDFDocument45 pagesGillvvvvvvvvvvvvvvvvvv PDFIsraa EzzetNo ratings yet
- Presentation Anglais Ecovadis InfographiqueDocument2 pagesPresentation Anglais Ecovadis InfographiqueSteve TedomNo ratings yet
- Huawei RU-5G-101 DatasheetDocument4 pagesHuawei RU-5G-101 DatasheetCarlosNo ratings yet
- Golight Stryker Light Aps Aus Eng A4Document1 pageGolight Stryker Light Aps Aus Eng A4Oscar Acevedo MirandaNo ratings yet
- Arc Chute Filter TechnologyDocument2 pagesArc Chute Filter TechnologyantigeniusNo ratings yet
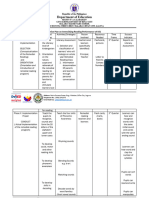
- Kinder Catch Up Friday Action PlanDocument4 pagesKinder Catch Up Friday Action PlanAriane PimentelNo ratings yet
- MTU16V4000DS2000 2000kW StandbyDocument4 pagesMTU16V4000DS2000 2000kW Standbyalfan nashNo ratings yet
- TEXT WORK Breakdown From Complete Stanislavski ToolkitDocument3 pagesTEXT WORK Breakdown From Complete Stanislavski ToolkitVj KamiloNo ratings yet
- July 3 2011Document6 pagesJuly 3 2011stalbertthegreatNo ratings yet
- Supporting Decisions and ProcessesDocument32 pagesSupporting Decisions and ProcessestoysdreatNo ratings yet
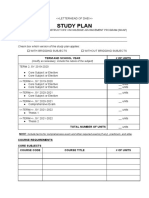
- Study Plan Template (Annex C)Document3 pagesStudy Plan Template (Annex C)khiemons1No ratings yet
- Session-1: Unpacking Agenda 2030: 1.4. Categorization of 17 Sdgs Into 5PsDocument2 pagesSession-1: Unpacking Agenda 2030: 1.4. Categorization of 17 Sdgs Into 5PsPal GuptaNo ratings yet
- Properties of Pure SubstanceDocument26 pagesProperties of Pure SubstanceMahadi HasanNo ratings yet
- SQL InjectionDocument39 pagesSQL InjectionDhano KamelNo ratings yet
- Dredgepack - Preparation.2022Document60 pagesDredgepack - Preparation.2022Juan Eduardo SchebelaNo ratings yet
- Adaptive Traffic Light Controller Using FPGADocument6 pagesAdaptive Traffic Light Controller Using FPGAshresthanageshNo ratings yet
- Stefan Molyneux - The - Handbook - of - Human - Ownership PDFDocument25 pagesStefan Molyneux - The - Handbook - of - Human - Ownership PDFSamuelNo ratings yet