You might also like
- Application Note AN2586Document28 pagesApplication Note AN2586francisval20No ratings yet
- AN4206 Application Note: Getting Started With STM32F3 Series Hardware DevelopmentDocument34 pagesAN4206 Application Note: Getting Started With STM32F3 Series Hardware DevelopmentOmarBinNaeemNo ratings yet
- Manual de Operação Do SMA-1kDocument102 pagesManual de Operação Do SMA-1kgbaetaNo ratings yet
- An2586 Getting Started With Stm32f10xxx Hardware Development StmicroelectronicsDocument29 pagesAn2586 Getting Started With Stm32f10xxx Hardware Development StmicroelectronicsGERMANNo ratings yet
- AN4353 SPC57xx SPC58xx Debug over CAN Rev3 March 2017Document32 pagesAN4353 SPC57xx SPC58xx Debug over CAN Rev3 March 2017zengkehuang2012No ratings yet
- MC9S12NE64V1Document554 pagesMC9S12NE64V1Phạm Thanh PhonGNo ratings yet
- Clock Configuration Tool For STM32F40xx - 41xx - 427x - 437x Application Note AN3988Document20 pagesClock Configuration Tool For STM32F40xx - 41xx - 427x - 437x Application Note AN3988sskendreNo ratings yet
- AN5276 Application Note: Antenna Design For ST25R3916Document43 pagesAN5276 Application Note: Antenna Design For ST25R3916RafaelNo ratings yet
- UM1670 User Manual: Discovery Kit With STM32F429ZI MCUDocument36 pagesUM1670 User Manual: Discovery Kit With STM32F429ZI MCUDjordje LazarevićNo ratings yet
- SPC563M64L7Document142 pagesSPC563M64L7quemasda quiensoyNo ratings yet
- AN1905 Application Note: St7Mc Three-Phase BLDC Motor Control Software LibraryDocument77 pagesAN1905 Application Note: St7Mc Three-Phase BLDC Motor Control Software LibraryEzequiel AriasNo ratings yet
- Str71xf Microcontroller Family StmicroelectronicsDocument264 pagesStr71xf Microcontroller Family StmicroelectronicsRogérioAlvarengaNo ratings yet
- DatasheetDocument87 pagesDatasheetcarlos duranNo ratings yet
- DRM064Document130 pagesDRM064Juanito Naxito Jebus ArjonaNo ratings yet
- CANopen PC-based Automation v4-2 enDocument105 pagesCANopen PC-based Automation v4-2 enwalter allNo ratings yet
- An5093 Getting Started With stm32g4 Series Hardware Development Boards StmicroelectronicsDocument35 pagesAn5093 Getting Started With stm32g4 Series Hardware Development Boards StmicroelectronicsnounkhayNo ratings yet
- MCU Infineon_XC222XL_DS_v01_02_EN-3168007Document110 pagesMCU Infineon_XC222XL_DS_v01_02_EN-3168007Hamza HammadiNo ratings yet
- MC908JL3ECPE Freescale Semiconductor Datasheet 18773Document172 pagesMC908JL3ECPE Freescale Semiconductor Datasheet 18773rcarrillo71No ratings yet
- AN4938 Application Note: Getting Started With STM32H74xI/G and STM32H75xI/G Hardware DevelopmentDocument46 pagesAN4938 Application Note: Getting Started With STM32H74xI/G and STM32H75xI/G Hardware DevelopmentHoàng Nam NguyễnNo ratings yet
- DatasheetDocument88 pagesDatasheetmarino246No ratings yet
- STM32F7xxx - Hardware Development PDFDocument54 pagesSTM32F7xxx - Hardware Development PDFYen DaoNo ratings yet
- An2820 Driving Bipolar Stepper Motors Using A Mediumdensity Stm32f103xx Microcontroller StmicroelectronicsDocument23 pagesAn2820 Driving Bipolar Stepper Motors Using A Mediumdensity Stm32f103xx Microcontroller StmicroelectronicsPablo SalazarNo ratings yet
- AN2820 Application Note: Driving Bipolar Stepper Motors Using A Medium-Density STM32F103xx MicrocontrollerDocument23 pagesAN2820 Application Note: Driving Bipolar Stepper Motors Using A Medium-Density STM32F103xx MicrocontrollerKerby GagarinNo ratings yet
- TC 1728Document2,570 pagesTC 1728amit vajaNo ratings yet
- STM32F3DISCOVERY - User ManualDocument36 pagesSTM32F3DISCOVERY - User ManualBayo PuddicombeNo ratings yet
- An1709 Application Note: Emc Design Guide For Stm8, Stm32 and Legacy McusDocument38 pagesAn1709 Application Note: Emc Design Guide For Stm8, Stm32 and Legacy McusKerby GagarinNo ratings yet
- 24C08 STMicroelectronicsDocument33 pages24C08 STMicroelectronicsLuis BritoNo ratings yet
- En DM00093903Document36 pagesEn DM00093903anjanNo ratings yet
- f411 User ManuelDocument36 pagesf411 User ManuelDeniz Melek TürkNo ratings yet
- Getting Started With stm32f030xx and stm32f070xx Series Hardware Development StmicroelectronicsDocument26 pagesGetting Started With stm32f030xx and stm32f070xx Series Hardware Development StmicroelectronicsDinesh DhimanNo ratings yet
- Infineon TC1766 DS v01 00 enDocument117 pagesInfineon TC1766 DS v01 00 enFiliberto Conde MayoNo ratings yet
- Dm00119042 PWM Resolution Enhancement Through A Dithering Technique For Stm32 Advancedconfiguration Generalpurpose and Lite Timers StmicroelectronicsDocument22 pagesDm00119042 PWM Resolution Enhancement Through A Dithering Technique For Stm32 Advancedconfiguration Generalpurpose and Lite Timers StmicroelectronicscutoNo ratings yet
- XDPL8105 - Digital Flyback Controller IC: About This DocumentDocument33 pagesXDPL8105 - Digital Flyback Controller IC: About This Documentzuffflor_925748656No ratings yet
- AN4507 Application NoteDocument22 pagesAN4507 Application Noteali ghalibNo ratings yet
- Infineon TC1762 DS v01 - 00 en PDFDocument114 pagesInfineon TC1762 DS v01 - 00 en PDFNima BeheshtiNo ratings yet
- M24C16-x M24C08-x M24C04-x M24C02-x M24C01-x: 16 Kbit, 8 Kbit, 4 Kbit, 2 Kbit and 1 Kbit Serial I C Bus EEPROMDocument38 pagesM24C16-x M24C08-x M24C04-x M24C02-x M24C01-x: 16 Kbit, 8 Kbit, 4 Kbit, 2 Kbit and 1 Kbit Serial I C Bus EEPROMhcarcaroNo ratings yet
- An4636 Demonstration of LC Sensor For Gas or Water Metering Based On Stm32l073zeval and Stm32l476rgnucleo Boards StmicroelectronicsDocument70 pagesAn4636 Demonstration of LC Sensor For Gas or Water Metering Based On Stm32l073zeval and Stm32l476rgnucleo Boards StmicroelectronicsMárcio FerreiraNo ratings yet
- Reference Manual: PC1616 / PC1832 / PC1864Document68 pagesReference Manual: PC1616 / PC1832 / PC1864bfahmed1100% (2)
- EEPROM - m24c64-w PDFDocument38 pagesEEPROM - m24c64-w PDFLodewyk KleynhansNo ratings yet
- AN4660Document39 pagesAN4660Toldo94No ratings yet
- Fujitsu Semiconductor: JasmineDocument58 pagesFujitsu Semiconductor: JasmineДрагиша Небитни ТрифуновићNo ratings yet
- c167cr UmDocument464 pagesc167cr Umarazvan2002No ratings yet
- ESD2 User Manual - Unlocked - RemovedDocument13 pagesESD2 User Manual - Unlocked - RemovedrubenNo ratings yet
- UM1724 User Manual: STM32 Nucleo-64 Boards (MB1136)Document69 pagesUM1724 User Manual: STM32 Nucleo-64 Boards (MB1136)Basti NichtechtdernameNo ratings yet
- UM1570 User Manual: Discovery Kit With STM32F303VC MCUDocument37 pagesUM1570 User Manual: Discovery Kit With STM32F303VC MCUNguyễn Đức ThuậnNo ratings yet
- Stcomet: Smart Meter and Powerline Communication System-On-ChipDocument67 pagesStcomet: Smart Meter and Powerline Communication System-On-Chipengamin_sNo ratings yet
- Jameco Part Number 697961: Distributed byDocument25 pagesJameco Part Number 697961: Distributed byElwanNo ratings yet
- Reference Manual PC1616 PC1832 PC1864Document72 pagesReference Manual PC1616 PC1832 PC1864Gonzalo muñozNo ratings yet
- UM1983 User Manual: VL6180X Proximity, Gesture and Ambient Light Sensing (ALS)Document39 pagesUM1983 User Manual: VL6180X Proximity, Gesture and Ambient Light Sensing (ALS)lucianobuglioniNo ratings yet
- AN2799 Application Note: Measuring Mains Power Consumption With The STM32x and STPM01Document14 pagesAN2799 Application Note: Measuring Mains Power Consumption With The STM32x and STPM01am1liNo ratings yet
- STM8 L101 FXDocument88 pagesSTM8 L101 FXReVNo ratings yet
- Infineon ControllerDocument134 pagesInfineon ControllerJesus gomez corvalanNo ratings yet
- dm00260799 Writing To Nonvolatile Memory Without Disrupting Code Execution On Microcontrollers of The stm32l0 and stm32l1 Series StmicroelectronicsDocument16 pagesdm00260799 Writing To Nonvolatile Memory Without Disrupting Code Execution On Microcontrollers of The stm32l0 and stm32l1 Series Stmicroelectronicsusha raman adapaNo ratings yet
- STM32F103 DatasheetDocument80 pagesSTM32F103 DatasheetmikyduudeNo ratings yet
- MC68HC908GZ16Document314 pagesMC68HC908GZ16bammm555No ratings yet
- FinFET Modeling for IC Simulation and Design: Using the BSIM-CMG StandardFrom EverandFinFET Modeling for IC Simulation and Design: Using the BSIM-CMG StandardRating: 5 out of 5 stars5/5 (1)
- Microprocessor Programming and Applications for Scientists and EngineersFrom EverandMicroprocessor Programming and Applications for Scientists and EngineersNo ratings yet
- Deploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideFrom EverandDeploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideRating: 5 out of 5 stars5/5 (2)
- Quick Change Lathe Tool Holder ProjectDocument1 pageQuick Change Lathe Tool Holder ProjectAndy LNo ratings yet
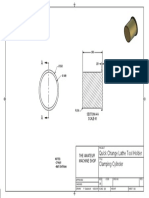
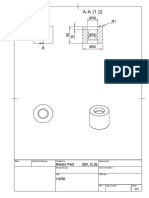
- Clamping Cylinder DrawingDocument1 pageClamping Cylinder DrawingAndy LNo ratings yet
- Convert lock ring pliers between internal and external useDocument61 pagesConvert lock ring pliers between internal and external useAndy LNo ratings yet
- Post Cam DrawingDocument1 pagePost Cam DrawingAndy LNo ratings yet
- Swivel Bar DrawingDocument1 pageSwivel Bar DrawingAndy LNo ratings yet
- Lauf RolleDocument1 pageLauf RolleAndy LNo ratings yet
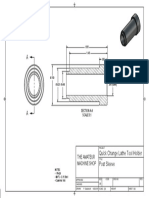
- Post Sleeve DrawingDocument1 pagePost Sleeve DrawingAndy LNo ratings yet
- Csa 75 KeDocument98 pagesCsa 75 KeAndy LNo ratings yet
- Csa 120 TeDocument30 pagesCsa 120 TeAndy LNo ratings yet
- Csa120k SeriesDocument24 pagesCsa120k SeriesAndy LNo ratings yet
- Csa 75 KeDocument98 pagesCsa 75 KeAndy LNo ratings yet
- Csa120k SeriesDocument24 pagesCsa120k SeriesAndy LNo ratings yet
- Garrick Herbert CatalogueDocument50 pagesGarrick Herbert CatalogueAndy LNo ratings yet
- Csa 120 TeDocument30 pagesCsa 120 TeAndy LNo ratings yet
- SMC FrontPanel ExtensionBoardV8 SMD SchematicDocument1 pageSMC FrontPanel ExtensionBoardV8 SMD SchematicAndy LNo ratings yet
- Cs Panasonic AcDocument114 pagesCs Panasonic AcAndy LNo ratings yet
- Csa 120 TeDocument30 pagesCsa 120 TeAndy LNo ratings yet
- Directional LED and switch control boardDocument2 pagesDirectional LED and switch control boardAndy LNo ratings yet
- PT Parts - Poly-V Pulleys & BeltsDocument12 pagesPT Parts - Poly-V Pulleys & BeltsAndy LNo ratings yet
- CQ6236, CQ6240-1Document30 pagesCQ6236, CQ6240-1Andy LNo ratings yet
- Jabra Motion UC and Motion UC Plus 301112 - ENDocument31 pagesJabra Motion UC and Motion UC Plus 301112 - ENAndy LNo ratings yet
- pm50cl1b120 eDocument9 pagespm50cl1b120 eAndy LNo ratings yet
- Pid1 01 0Document52 pagesPid1 01 0Andy LNo ratings yet
- Pegasus Spare PartsDocument54 pagesPegasus Spare PartsAndy LNo ratings yet
- Man Ssa Ug en 0698Document43 pagesMan Ssa Ug en 0698Andy LNo ratings yet
- Pegasus User ManualDocument72 pagesPegasus User ManualAndy LNo ratings yet
- Ps22a78 EDocument11 pagesPs22a78 EAndy LNo ratings yet
- Korean 3D TemplateDocument1 pageKorean 3D TemplateAndy LNo ratings yet
- HWFR6510 Aus M en QSPGDocument3 pagesHWFR6510 Aus M en QSPGAndy LNo ratings yet
- IC Scooter Cat - Nov 2020 Low ResDocument20 pagesIC Scooter Cat - Nov 2020 Low ResAndy LNo ratings yet
- STM32 Microcontroller Debug Toolbox PDFDocument99 pagesSTM32 Microcontroller Debug Toolbox PDFHồ Chí NhânNo ratings yet
- 2.8inch SPI Module MSP2807 User Manual: Lcdwiki CR2018-MI3028Document23 pages2.8inch SPI Module MSP2807 User Manual: Lcdwiki CR2018-MI3028Daniel KarasaniNo ratings yet
- Dm00105879 Description of Stm32f4 Hal and LL Drivers StmicroelectronicsDocument2,123 pagesDm00105879 Description of Stm32f4 Hal and LL Drivers StmicroelectronicstestaccNo ratings yet
- Um2073 User Manual: Stm32 Lora Software Expansion For Stm32CubeDocument40 pagesUm2073 User Manual: Stm32 Lora Software Expansion For Stm32CubeZeynep Emirhan ŞenyüzNo ratings yet
- Nucleoft PDFDocument6 pagesNucleoft PDFcristian sanchezNo ratings yet
- UM1727 User Manual: Getting Started With STM32 Nucleo Board Software Development ToolsDocument22 pagesUM1727 User Manual: Getting Started With STM32 Nucleo Board Software Development ToolsHang CuiNo ratings yet
- UM2407 User Manual: STM32H7 Nucleo-144 Boards (MB1364)Document50 pagesUM2407 User Manual: STM32H7 Nucleo-144 Boards (MB1364)Jonathan GonzagaNo ratings yet
- Stm32flash ManualDocument4 pagesStm32flash ManualCristh JuarezNo ratings yet
- Nucleo: XXXXKXDocument6 pagesNucleo: XXXXKXFernando CostaNo ratings yet
- S8254A E.en - PTDocument24 pagesS8254A E.en - PTleandroNo ratings yet
- stm32mp135f dk-3107229Document8 pagesstm32mp135f dk-3107229Fabiano SchincariolNo ratings yet
- Inteligencia ArtificialDocument50 pagesInteligencia ArtificialJulián CárdenasNo ratings yet
- STM Notes Notes stm32 PDFDocument38 pagesSTM Notes Notes stm32 PDFpriyaNo ratings yet
- List of ARM Cortex-M Development ToolsDocument8 pagesList of ARM Cortex-M Development Toolsscience pathNo ratings yet
- Open429I-C User Manual Guide to STM32F429 Development BoardDocument30 pagesOpen429I-C User Manual Guide to STM32F429 Development BoardivanlbragaNo ratings yet
- An2606 stm32 Microcontroller System Memory Boot Mode StmicroelectronicsDocument435 pagesAn2606 stm32 Microcontroller System Memory Boot Mode StmicroelectronicsvmvarecloudNo ratings yet
- ReportTemplate PracticalTask or ProjectDocument27 pagesReportTemplate PracticalTask or ProjectDony Beast (DurraniFared)No ratings yet
- STM32 Development Boards Portfolio: Ecosystem Marketing Q2'2021Document26 pagesSTM32 Development Boards Portfolio: Ecosystem Marketing Q2'2021Moram SmrsatNo ratings yet
- STM32Journal DSPC PDFDocument9 pagesSTM32Journal DSPC PDFNguyen Ho LongNo ratings yet
- Um3103 Stm32wba Nucleo64 Board mb1863 StmicroelectronicsDocument40 pagesUm3103 Stm32wba Nucleo64 Board mb1863 StmicroelectronicsslimslimkhmissiNo ratings yet
- STM32 F4 Series High-Performance Cortex-M4 MCUDocument4 pagesSTM32 F4 Series High-Performance Cortex-M4 MCUBa VuVanNo ratings yet
- STSW Link004Document3 pagesSTSW Link004Hla Swe OoNo ratings yet
- stm32 Main Board BomDocument2 pagesstm32 Main Board BomAmine HerbacheNo ratings yet
- An4636 Demonstration of LC Sensor For Gas or Water Metering Based On Stm32l073zeval and Stm32l476rgnucleo Boards StmicroelectronicsDocument70 pagesAn4636 Demonstration of LC Sensor For Gas or Water Metering Based On Stm32l073zeval and Stm32l476rgnucleo Boards StmicroelectronicsMárcio FerreiraNo ratings yet
- DM00040808 PDFDocument10 pagesDM00040808 PDFrsudjianNo ratings yet
- 3.2 Inch LCD Shield For MEGA 2560Document9 pages3.2 Inch LCD Shield For MEGA 2560detonatNo ratings yet
- An4894 Eeprom Emulation Techniques and Software For stm32 Microcontrollers StmicroelectronicsDocument40 pagesAn4894 Eeprom Emulation Techniques and Software For stm32 Microcontrollers StmicroelectronicsK M Mosheur RahmanNo ratings yet
- Stlink v3 BridgeDocument7 pagesStlink v3 BridgeDrew AlbaneseNo ratings yet
- Nucleo-32 User ManualDocument34 pagesNucleo-32 User ManualAdrian_666No ratings yet
- STM32F429 Seminar CombinedModulesDocument259 pagesSTM32F429 Seminar CombinedModulesgsmsby100% (1)