You might also like
- STM32F0 C Code For Remote Control InputDocument15 pagesSTM32F0 C Code For Remote Control InputLuke Maximo Bell100% (1)
- CodemauDocument8 pagesCodemauTiến Bùi ĐìnhNo ratings yet
- Mini Project RtsDocument11 pagesMini Project RtsOng Xuan YaoNo ratings yet
- Heliberto FinalDocument7 pagesHeliberto FinalAlvaro ZapataNo ratings yet
- Control LEDs with MCUDocument91 pagesControl LEDs with MCUKhánh Trịnh MinhNo ratings yet
- Lap-Trinh-He-Thong-Nhung - Bui-Quoc-Bao - Codemau - (Cuuduongthancong - Com)Document8 pagesLap-Trinh-He-Thong-Nhung - Bui-Quoc-Bao - Codemau - (Cuuduongthancong - Com)Uy Phạm MinhNo ratings yet
- Un Giroscopio: Materiales DroneDocument9 pagesUn Giroscopio: Materiales DroneJuan Carlos VásquezNo ratings yet
- Programs For DSPDocument48 pagesPrograms For DSPSaiNo ratings yet
- Initgpio: Void VoidDocument12 pagesInitgpio: Void Voidapi-397509789No ratings yet
- PidDocument5 pagesPidArif Nugroho100% (1)
- #Define #Define #Define #Define #Define #Define #Define #DefineDocument6 pages#Define #Define #Define #Define #Define #Define #Define #Defineอํานาจ จันทรNo ratings yet
- Drone Control SoftwareDocument13 pagesDrone Control SoftwareAnonymous 3yqNzCxtTzNo ratings yet
- TP3 - FFT en C Con MXUXpressoDocument5 pagesTP3 - FFT en C Con MXUXpressoFederico CarrilloNo ratings yet
- TP DSPDocument16 pagesTP DSPikram mbrNo ratings yet
- DSPIC30f2010 C Code SanjayDocument16 pagesDSPIC30f2010 C Code SanjayMian Fahim75% (8)
- Software Program: Appendix EDocument33 pagesSoftware Program: Appendix Emostafa HusseinNo ratings yet
- CodigoDocument5 pagesCodigopepe pecasNo ratings yet
- Tutorial Week 5 AnswersDocument8 pagesTutorial Week 5 Answerspotato moon berryNo ratings yet
- Stepper Acceleration FreertosDocument9 pagesStepper Acceleration FreertosSourabh KumawatNo ratings yet
- GPIO Code ExamplesDocument7 pagesGPIO Code ExamplescrsarinNo ratings yet
- Main Program MonitoringDocument10 pagesMain Program MonitoringBagus NugrohoNo ratings yet
- Minimize An Error With A PID Controller in Unity With C#Document7 pagesMinimize An Error With A PID Controller in Unity With C#Artyom FreemanNo ratings yet
- Flowing Fountain Source CodeDocument12 pagesFlowing Fountain Source CodeRoisil D'souzaNo ratings yet
- Code MauDocument22 pagesCode MauKhánh Trịnh MinhNo ratings yet
- Nvidia Cuda Programming GuideDocument8 pagesNvidia Cuda Programming GuideAndiko Putro SuryotomoNo ratings yet
- AVR EEPROM Configuration LoadingDocument11 pagesAVR EEPROM Configuration LoadingBimo Ahmad YuliarNo ratings yet
- Listing Program ArduinoDocument15 pagesListing Program ArduinoRizky SyahputraNo ratings yet
- Novo Documento de TextoDocument15 pagesNovo Documento de TextoJonatan Allan Oliveira SouzaNo ratings yet
- CodenghiencuuDocument7 pagesCodenghiencuuNhat NguyenNo ratings yet
- MotorencodersDocument9 pagesMotorencodersapi-398062839100% (1)
- Codigo en C para Transmision FM en RaspberryDocument5 pagesCodigo en C para Transmision FM en RaspberryRFID DemarkaNo ratings yet
- PIC16F628A GSM SMSDocument6 pagesPIC16F628A GSM SMSSake gtrNo ratings yet
- ESP8266 Masina3PWM - InoDocument10 pagesESP8266 Masina3PWM - InomarinpopaNo ratings yet
- SodaPDF-converted-Si5351 RXTX VFO V3Document12 pagesSodaPDF-converted-Si5351 RXTX VFO V3LU8DIW Roberto MartinezNo ratings yet
- IK_BALANCINGDocument7 pagesIK_BALANCINGTanner DuncanNo ratings yet
- DMD - Ver - 1 - 0 CodeDocument6 pagesDMD - Ver - 1 - 0 CodepopescucvNo ratings yet
- Sensor Ve ESP8266Document13 pagesSensor Ve ESP8266ilker aykutNo ratings yet
- McEnroe Thesis Appendix ADocument22 pagesMcEnroe Thesis Appendix AMartin McEnroeNo ratings yet
- Conteo de PulsasionesDocument1 pageConteo de PulsasionesArmando BocanegraNo ratings yet
- CODIGOS DISEýýO MECATRONICODocument25 pagesCODIGOS DISEýýO MECATRONICOOscar Olvera HernandezNo ratings yet
- Display "Hello World"message Using Internal UARTDocument16 pagesDisplay "Hello World"message Using Internal UARTAkshathaNo ratings yet
- CodecuDocument6 pagesCodecuLinhChi HPNo ratings yet
- 7 Seg Done G CodeDocument6 pages7 Seg Done G Codekiran belleNo ratings yet
- PwmserviceDocument8 pagesPwmserviceapi-438120791No ratings yet
- Final 7segDocument11 pagesFinal 7segkiran belleNo ratings yet
- ADXL345_sensor_I2C_interfaceDocument5 pagesADXL345_sensor_I2C_interfaceavi kishuNo ratings yet
- 4 Segment Display Counter AppDocument10 pages4 Segment Display Counter AppYasin çelebiNo ratings yet
- Code LocDocument5 pagesCode LocKa TrầnNo ratings yet
- DcmotorDocument15 pagesDcmotorapi-397492879No ratings yet
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- Programa SPI MestreDocument5 pagesPrograma SPI MestreAlan Robson100% (1)
- LED Control with MSP430 and Watchdog TimerDocument3 pagesLED Control with MSP430 and Watchdog TimerKK WNo ratings yet
- PIC18F4550 microcontroller library and configuration codeDocument6 pagesPIC18F4550 microcontroller library and configuration codeJhon PerezNo ratings yet
- TP1 DSPDocument6 pagesTP1 DSPikram mbrNo ratings yet
- PID-kirjaston tuonti ja saatimen määritysDocument8 pagesPID-kirjaston tuonti ja saatimen määritysSam Fisher LambertNo ratings yet
- Main Line STMDocument16 pagesMain Line STMThinh HoangNo ratings yet
- Obd2 Simulator - InoDocument4 pagesObd2 Simulator - InoabdNo ratings yet
- Keyboard - C: Programa en C USB PIC18FDocument11 pagesKeyboard - C: Programa en C USB PIC18FLuis GonzalesNo ratings yet
- Three-Phase Motor Control With STM32F401RET6U: B L D CDocument34 pagesThree-Phase Motor Control With STM32F401RET6U: B L D Cbokic88No ratings yet
- 11 NoSQL-slidesDocument26 pages11 NoSQL-slidesAkshayNo ratings yet
- 8086 Interrupts1Document4 pages8086 Interrupts1AkshayNo ratings yet
- HTML 5 StructureDocument12 pagesHTML 5 StructureAkshayNo ratings yet
- Instruction SetDocument14 pagesInstruction SetAkshayNo ratings yet
- HTML Elements Reference GuideDocument5 pagesHTML Elements Reference GuideAkshayNo ratings yet
- Appendix G TensorflowDocument35 pagesAppendix G TensorflowAkshayNo ratings yet
- Big Data Analytics Lab ManualDocument38 pagesBig Data Analytics Lab ManualAkshayNo ratings yet
- VMware UserManualDocument545 pagesVMware UserManualAkshayNo ratings yet
- A Digitally Controlled Switch Mode Power Supply Based On Matrix ConverterDocument7 pagesA Digitally Controlled Switch Mode Power Supply Based On Matrix ConverterAkshayNo ratings yet
- Pattern of The NEETDocument1 pagePattern of The NEETAkshayNo ratings yet
- Notification No. AC-66 2022Document9 pagesNotification No. AC-66 2022AkshayNo ratings yet
- MHT CET Exam PatternDocument1 pageMHT CET Exam PatternAkshayNo ratings yet
- Mathematics MHT-CET: Syllabus With Chapter Wise WeightageDocument3 pagesMathematics MHT-CET: Syllabus With Chapter Wise WeightageAkshayNo ratings yet
- MHT CET Biology Class XI and XII SyllabusDocument4 pagesMHT CET Biology Class XI and XII SyllabusAkshayNo ratings yet
- Emtl PPT Final PDFDocument91 pagesEmtl PPT Final PDFpravikrishna090% (1)
- Introduction 2003Document41 pagesIntroduction 2003Selva RajNo ratings yet
- Phase Controlled RectifiersDocument51 pagesPhase Controlled RectifiersAkshay100% (1)
- Phase Controlled RectifiersDocument51 pagesPhase Controlled RectifiersAkshay100% (1)
- Phase Controlled RectifiersDocument51 pagesPhase Controlled RectifiersAkshay100% (1)
- Verilog Examples Useful For FPGA & ASIC SynthesisDocument21 pagesVerilog Examples Useful For FPGA & ASIC SynthesisVIJAYPUTRANo ratings yet
- Digital ElectronicsDocument9 pagesDigital ElectronicsmanikantamadetiNo ratings yet
- EMV Smart Card ReaderDocument58 pagesEMV Smart Card ReaderPablo DanielNo ratings yet
- Entry & Exit in Same Candle - AFL Programming - Am PDFDocument7 pagesEntry & Exit in Same Candle - AFL Programming - Am PDFHitesh Chaudhary0% (1)
- Microprocesor 3 UnitDocument47 pagesMicroprocesor 3 UnitGanapathy RamadossNo ratings yet
- Deep State Encryption For Sequential Logic Circuits: September 2019Document7 pagesDeep State Encryption For Sequential Logic Circuits: September 2019Hussein ShakirNo ratings yet
- Design for Testability GuideDocument47 pagesDesign for Testability GuideRaoNo ratings yet
- Introduction to Digital VLSI Logic Synthesis Timing AnalysisDocument18 pagesIntroduction to Digital VLSI Logic Synthesis Timing AnalysiskocchopNo ratings yet
- Synchronous Counter Design and AnalysisDocument12 pagesSynchronous Counter Design and AnalysisRajasekar PichaimuthuNo ratings yet
- Adf4110 4111 4112 4113Document28 pagesAdf4110 4111 4112 4113Juan Manuel MuñozNo ratings yet
- Digital Logic Handbook 1975-76Document711 pagesDigital Logic Handbook 1975-76Kevin G. RhoadsNo ratings yet
- VLSI Design Subject Notes on Structured Digital Circuits and SystemsDocument9 pagesVLSI Design Subject Notes on Structured Digital Circuits and SystemsPranav ChaturvediNo ratings yet
- De Lab ManualDocument42 pagesDe Lab ManualAnjali KumariNo ratings yet
- Module 7 Latches and Flip-Flops (Student)Document10 pagesModule 7 Latches and Flip-Flops (Student)Ghana KumaranNo ratings yet
- 1 MetastabilityDocument58 pages1 Metastability0106062007No ratings yet
- m146818 Realtime Clock PDFDocument2 pagesm146818 Realtime Clock PDFCosme Fula NitoNo ratings yet
- Digital Logic Design R17a0461Document131 pagesDigital Logic Design R17a0461zaidshabir1No ratings yet
- DLD printEXPERIMENTDocument34 pagesDLD printEXPERIMENTdoggyyyyyyNo ratings yet
- Data SheetDocument2 pagesData Sheetmoslem clothwearNo ratings yet
- Features: 1-Channel 151Mhz ReceiverDocument8 pagesFeatures: 1-Channel 151Mhz ReceiverTrịnh Đức HạnhNo ratings yet
- Examples of Setup and Hold TimeDocument24 pagesExamples of Setup and Hold TimevpsampathNo ratings yet
- Automatic Changeover SwitchDocument16 pagesAutomatic Changeover SwitchAjaySharma100% (1)
- GE STENOSCOP 2 Advanced Service ManualDocument265 pagesGE STENOSCOP 2 Advanced Service Manualcrservice92% (12)
- Burglar Alarm ProjectDocument6 pagesBurglar Alarm ProjectAvik Pathak100% (1)
- How To Build An 8 Bit Computer PDFDocument22 pagesHow To Build An 8 Bit Computer PDFxxxxxxxxxxxxxNo ratings yet
- HDL Compiler (Presto Verilog) Reference ManualDocument258 pagesHDL Compiler (Presto Verilog) Reference Manual易炀No ratings yet
- EE 2174 Lab 9 NewDocument6 pagesEE 2174 Lab 9 NewnotdrphilNo ratings yet
- Layout and Stick DiagramDocument70 pagesLayout and Stick DiagramAMRUTHWAR SWAROOPANo ratings yet
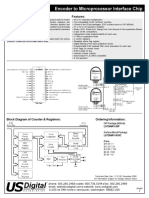
- Encoder To Microprocessor Interface Chip Chip: Features: DescriptionDocument6 pagesEncoder To Microprocessor Interface Chip Chip: Features: DescriptionserviciobsasNo ratings yet