You might also like
- Learning Activity Sheet in General Physics 1 Lesson 11: Periodic MotionDocument9 pagesLearning Activity Sheet in General Physics 1 Lesson 11: Periodic MotionSenica Caydil Jay D.No ratings yet
- Oscillatory MotionDocument182 pagesOscillatory MotionAlain McVaneyNo ratings yet
- Chapter 7 Short QuestionDocument4 pagesChapter 7 Short QuestionranaateeqNo ratings yet
- Ocsillations and WavesDocument92 pagesOcsillations and WavesArundhati KulkarniNo ratings yet
- Chapter 13: Vibrations and Waves Simple Harmonic Motion: X A M K VDocument7 pagesChapter 13: Vibrations and Waves Simple Harmonic Motion: X A M K VJohnBenardNo ratings yet
- Physics ch5Document78 pagesPhysics ch5amanuel amanNo ratings yet
- OSCILLATIONSDocument7 pagesOSCILLATIONSniraj makashreNo ratings yet
- PY231: Notes On Linear and Nonlinear Oscillators, and Periodic WavesDocument20 pagesPY231: Notes On Linear and Nonlinear Oscillators, and Periodic WavesVastavikta SinghNo ratings yet
- Simple Harmonic Motion (SHM)Document19 pagesSimple Harmonic Motion (SHM)Alisa DowningNo ratings yet
- Unit 5 PDFDocument25 pagesUnit 5 PDFTechMine HDNo ratings yet
- Simple Harmonic Motion IntroDocument37 pagesSimple Harmonic Motion IntroChristine LobbNo ratings yet
- Physics - I PDFDocument179 pagesPhysics - I PDFRENGANATHAN PNo ratings yet
- PHY11101 - Periodic MotionDocument5 pagesPHY11101 - Periodic MotionMD. SHAEKH ZAHAB CHOWDHURYNo ratings yet
- Oscillations TheoryDocument10 pagesOscillations TheoryJoanna PanayiNo ratings yet
- ZPPD Lecturephysics1430261805Document179 pagesZPPD Lecturephysics1430261805Ps Ak100% (1)
- Physics ProjectDocument12 pagesPhysics ProjectOjas TaoriNo ratings yet
- Simulate Spring Oscillation ExperimentDocument8 pagesSimulate Spring Oscillation ExperimentThảo Hà NguyễnNo ratings yet
- SHM PDFDocument13 pagesSHM PDFHasleen BeniNo ratings yet
- Periodic Motion: Powerpoint Lectures ForDocument44 pagesPeriodic Motion: Powerpoint Lectures ForAnonymous s6Gtfr2100% (2)
- wavesDocument3 pageswavesria sNo ratings yet
- Physics OscillationsDocument16 pagesPhysics Oscillationsmohammad rihelNo ratings yet
- Physics Mid-Sem CompilationDocument220 pagesPhysics Mid-Sem Compilationdhruv goraiNo ratings yet
- mth622 NotesDocument10 pagesmth622 Notesfaisal chathaNo ratings yet
- Oscillations Explained: Periodic Motion and Simple Harmonic MotionDocument33 pagesOscillations Explained: Periodic Motion and Simple Harmonic Motionmanish2443687No ratings yet
- Chapter14 PDFDocument56 pagesChapter14 PDFsailas simukanzyaNo ratings yet
- Chapter 2 Waves and Oscillation (Compatibility Mode) PDFDocument77 pagesChapter 2 Waves and Oscillation (Compatibility Mode) PDFVaibhavNo ratings yet
- Simple Harmonic MotionDocument13 pagesSimple Harmonic MotionAdid PunyaNo ratings yet
- Module 2 Unit 1Document6 pagesModule 2 Unit 1Jevaughn SmithNo ratings yet
- OscillationsDocument46 pagesOscillationsfunkpatel123No ratings yet
- Oscillation SDocument12 pagesOscillation SParakram Singh ShekhawatNo ratings yet
- Chapter 13Document55 pagesChapter 13Kaloka Galih KayuwangiNo ratings yet
- Chapter 13 New-2Document37 pagesChapter 13 New-2BeirutmarathonNo ratings yet
- Pptu-5 Oscillation 1Document19 pagesPptu-5 Oscillation 1Abraham DamtewNo ratings yet
- Chapter 7 Oscillatory Motion & WavesDocument37 pagesChapter 7 Oscillatory Motion & WavesAINUL FAKHIRA ZAIDINo ratings yet
- OscillationsDocument2 pagesOscillationsluciuszogratis561No ratings yet
- Unit - V: O: ScillationsDocument26 pagesUnit - V: O: ScillationsKiran ThunuguntlaNo ratings yet
- Web Dao Đ NG Và SóngDocument6 pagesWeb Dao Đ NG Và SóngdinhlynhndNo ratings yet
- Physics Gr.12 Monthly Note 2ndDocument45 pagesPhysics Gr.12 Monthly Note 2ndTebarek SitotawNo ratings yet
- Examples of Oscillations.: Time Equations Displacement EquationsDocument4 pagesExamples of Oscillations.: Time Equations Displacement Equationsstephanus abednegoNo ratings yet
- Oscillations & WavesDocument9 pagesOscillations & WavesAnthonette BaynoNo ratings yet
- SHM (AG Sir) 31-07-09 Teaching NotesDocument22 pagesSHM (AG Sir) 31-07-09 Teaching NotesSankar KumarasamyNo ratings yet
- IB Physics OscillationsDocument38 pagesIB Physics OscillationsVidya Prab100% (1)
- Unit 1 Lecture ppt-GOOLE CLASSDocument69 pagesUnit 1 Lecture ppt-GOOLE CLASSajay amuthaprianNo ratings yet
- Molecular Spectroscopy: Office: EmailDocument79 pagesMolecular Spectroscopy: Office: EmailLeeNo ratings yet
- Chapter 14 Periodic MotionsDocument7 pagesChapter 14 Periodic MotionsJessica BautistaNo ratings yet
- 11 Simple Harmonic Motion Revision Notes Quizrr PDFDocument52 pages11 Simple Harmonic Motion Revision Notes Quizrr PDFabhiNo ratings yet
- Chapter 15【Oscillations】Document20 pagesChapter 15【Oscillations】陳慶銘No ratings yet
- Week 4 - General Physics Damped Oscillations PDFDocument77 pagesWeek 4 - General Physics Damped Oscillations PDFMary Rose Jusay GumapacNo ratings yet
- MechanicDocument10 pagesMechanicHifza SaeedNo ratings yet
- Chapter 14 - Oscillations - NotesDocument12 pagesChapter 14 - Oscillations - Notes3910d utkarshsinghNo ratings yet
- Oscillations, Waves and OpticsDocument80 pagesOscillations, Waves and OpticsalayuNo ratings yet
- SHM Notes CompleteDocument58 pagesSHM Notes CompleteTushar SinghNo ratings yet
- A2 H 41c Shm&oscillationsDocument38 pagesA2 H 41c Shm&oscillationsHany ElGezawyNo ratings yet
- Oscillations Class 11 Notes Physics Chapter 14Document6 pagesOscillations Class 11 Notes Physics Chapter 14Kunal PrasadNo ratings yet
- SHM Oscillations GuideDocument11 pagesSHM Oscillations GuideakhilNo ratings yet
- Giet University, Gunupur: Depaertment of BSHDocument32 pagesGiet University, Gunupur: Depaertment of BSHArya NayakNo ratings yet
- AcousticsDocument23 pagesAcousticsNadheen AnNo ratings yet
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyFrom EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyRating: 3 out of 5 stars3/5 (2)
- FSRE SS AppendixGlossariesDocument27 pagesFSRE SS AppendixGlossariessachinchem020No ratings yet
- CP302 Example 01 OKDocument5 pagesCP302 Example 01 OKAw Yeong Pei Yee100% (1)
- PhoneFreedom 365 0 Instalment Postpaid Phone Plan DigiDocument1 pagePhoneFreedom 365 0 Instalment Postpaid Phone Plan DigiJals JNo ratings yet
- A Rail-To-Rail Constant Gain Buffered Op-Amp For Real Time Video ApplicationsDocument8 pagesA Rail-To-Rail Constant Gain Buffered Op-Amp For Real Time Video Applicationskvpk_vlsiNo ratings yet
- Concise Operating Instructions: Frequency Converter For HOISTING - TRAVEL (Siemens)Document9 pagesConcise Operating Instructions: Frequency Converter For HOISTING - TRAVEL (Siemens)Pablo Hidalgo ValenzuelaNo ratings yet
- Sand Compaction MethodDocument124 pagesSand Compaction Methodisaych33ze100% (1)
- Fast and Reliable: Handheld TympanometerDocument4 pagesFast and Reliable: Handheld TympanometersermedNo ratings yet
- Samsung RAM Product Guide Feb 11Document24 pagesSamsung RAM Product Guide Feb 11Javed KhanNo ratings yet
- Sipmos Power Transistor: BUZ 104LDocument10 pagesSipmos Power Transistor: BUZ 104LAlexsander MeloNo ratings yet
- GMS175CSDocument4 pagesGMS175CScorsini999No ratings yet
- IBM TS2900 Tape Autoloader RBDocument11 pagesIBM TS2900 Tape Autoloader RBLeonNo ratings yet
- FacebookH Cking 1 3 (SFILEDocument10 pagesFacebookH Cking 1 3 (SFILEFitra AkbarNo ratings yet
- 0520 Int OTG P4 MSDocument12 pages0520 Int OTG P4 MSTrévina JosephNo ratings yet
- Cebuano LanguageDocument15 pagesCebuano LanguageIsla PageNo ratings yet
- European Journal of Internal MedicineDocument4 pagesEuropean Journal of Internal Medicinesamer battatNo ratings yet
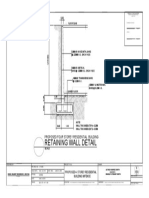
- Retaining Wall DetailsDocument1 pageRetaining Wall DetailsWilbert ReuyanNo ratings yet
- Definition and Scope of Public FinanceDocument2 pagesDefinition and Scope of Public FinanceArfiya MubeenNo ratings yet
- Deutsche BankDocument4 pagesDeutsche BankMukesh KumarNo ratings yet
- Tugas Bahasa Inggris Analytical Exposition Text: Disusun Oleh: Nama:Hansel Hendrawan Effendy Kelas:XI IPA 1Document4 pagesTugas Bahasa Inggris Analytical Exposition Text: Disusun Oleh: Nama:Hansel Hendrawan Effendy Kelas:XI IPA 1Hansel HendrawanNo ratings yet
- USP FriabilityDocument2 pagesUSP Friabilityshdph100% (1)
- LETTER OF AUTHORIZATION CREDO INVEST DownloadDocument1 pageLETTER OF AUTHORIZATION CREDO INVEST DownloadEsteban Enrique Posan BalcazarNo ratings yet
- BC Sample Paper-3Document4 pagesBC Sample Paper-3Roshini ANo ratings yet
- HEC-HMS Tutorials and Guides-V3-20210529 - 140315Document756 pagesHEC-HMS Tutorials and Guides-V3-20210529 - 140315Ervin PumaNo ratings yet
- Q3 Curriculum Map - Mathematics 10Document3 pagesQ3 Curriculum Map - Mathematics 10Manilyn BaltazarNo ratings yet
- DSC analysis of hair denaturationDocument2 pagesDSC analysis of hair denaturationDiosel Rezia PrazaNo ratings yet
- Lesson 2Document10 pagesLesson 2angeliquefaithemnaceNo ratings yet
- Pharmacology Ain Shams 123 - Compress 1Document552 pagesPharmacology Ain Shams 123 - Compress 1ahmed hoty100% (1)
- 2008-14-03Document6 pages2008-14-03RAMON CALDERONNo ratings yet
- Neutron SourcesDocument64 pagesNeutron SourcesJenodi100% (1)
- MaheshDocument20 pagesMaheshParthNo ratings yet