You might also like
- OSI ModelDocument29 pagesOSI ModelSirisha Vamsi100% (2)
- HandWritten Notes PhyscisDocument18 pagesHandWritten Notes PhyscisvanshNo ratings yet
- Pile Head Stress CalculationsDocument2 pagesPile Head Stress Calculationssivapathamuthu100% (1)
- Park Transformation and Clarke Transformation in DetailDocument20 pagesPark Transformation and Clarke Transformation in DetailKevin Dito GrandhikaNo ratings yet
- Power Electronicsall Five UnitDocument432 pagesPower Electronicsall Five Unitdj9017354No ratings yet
- 354 33 Powerpoint-Slides CH4Document52 pages354 33 Powerpoint-Slides CH4Saravanan JayabalanNo ratings yet
- PythonToolkit User GuideDocument190 pagesPythonToolkit User GuideWilmer Arcos100% (9)
- Fundamentals of Power Electronics_compressedDocument341 pagesFundamentals of Power Electronics_compressedghatiyashivani48No ratings yet
- 8255 NewDocument13 pages8255 Newmohit mishraNo ratings yet
- Tesis ABC - DQ0Document101 pagesTesis ABC - DQ0laloNo ratings yet
- Bus Organization of 8085Document14 pagesBus Organization of 8085michaeledem_royalNo ratings yet
- DLF Microprocessor 02 2017 18Document72 pagesDLF Microprocessor 02 2017 18ARSALAAN HUSSAINNo ratings yet
- Computer system servicing examDocument3 pagesComputer system servicing examJohn Jessie Cuachon ValeroNo ratings yet
- Microprocessor Programming: by Prof. Y. P. Jadhav. Physics Dept. Smt. C.H.M. College, Ulhasnagar-3Document104 pagesMicroprocessor Programming: by Prof. Y. P. Jadhav. Physics Dept. Smt. C.H.M. College, Ulhasnagar-3Prof. Yashavant p. JadhavNo ratings yet
- Zoology Full PDF EMDocument108 pagesZoology Full PDF EMSmiruthi RavichandranNo ratings yet
- Physical Short Notes - WatermarkedDocument175 pagesPhysical Short Notes - Watermarkedryzengfx6No ratings yet
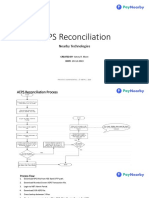
- AEPS ReconciliationDocument5 pagesAEPS ReconciliationAmey More100% (1)
- 8085 Microprocessor ArchitectureDocument46 pages8085 Microprocessor ArchitectureJuhil H Patel100% (1)
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Neurorehabilitation TechnologyDocument647 pagesNeurorehabilitation Technologypippen333100% (5)
- 8085Document47 pages8085Govind GuptaNo ratings yet
- M11 8085 ProgrammingDocument136 pagesM11 8085 ProgrammingPavan Deep100% (1)
- Microprocessors and Microcontrollers Module 1 - 5Document260 pagesMicroprocessors and Microcontrollers Module 1 - 5ncecentral0% (1)
- First Term Assignment CSC 471 Summer-2018: Rihab Rahman, 16103327, CSC 471, Sec-F, MAHDocument40 pagesFirst Term Assignment CSC 471 Summer-2018: Rihab Rahman, 16103327, CSC 471, Sec-F, MAHAbdur RazzakNo ratings yet
- C5 - Intro To 8085 - Hardware PDFDocument39 pagesC5 - Intro To 8085 - Hardware PDFsiti hajarNo ratings yet
- Microprocessor8085 BestDocument145 pagesMicroprocessor8085 BestDebashis TaraiNo ratings yet
- Instruction Set of 8085Document43 pagesInstruction Set of 8085Abdul YaseenNo ratings yet
- EE6502 MPMC UNIT 1-5 (Read-Only)Document607 pagesEE6502 MPMC UNIT 1-5 (Read-Only)Rajasekaran ThangarajuNo ratings yet
- Class 2-Introduction To 8085 Microprocessor PDFDocument46 pagesClass 2-Introduction To 8085 Microprocessor PDFDeepika AgrawalNo ratings yet
- Introduction To 8085 Microprocessor - Dr.P.YogeshDocument48 pagesIntroduction To 8085 Microprocessor - Dr.P.YogeshmailmeasddNo ratings yet
- Assembly Language Basics ExplainedDocument155 pagesAssembly Language Basics ExplainedIts MeNo ratings yet
- 8085Document56 pages8085Kunal MeherNo ratings yet
- Experiments On 8085 MicroprocessorDocument18 pagesExperiments On 8085 MicroprocessorSaumya MohanNo ratings yet
- Computer Organization: Instruction Set Architecture & Assembly Language ProgrammingDocument27 pagesComputer Organization: Instruction Set Architecture & Assembly Language ProgrammingbostanciNo ratings yet
- The 8085 Programming ModelDocument13 pagesThe 8085 Programming Modelapi-3850688100% (4)
- Electronics Basics SyllabusDocument124 pagesElectronics Basics SyllabusNikhil KulkarniNo ratings yet
- Pin Diagram and Functions of 8085 MicroprocessorDocument87 pagesPin Diagram and Functions of 8085 MicroprocessorRohan VaidyaNo ratings yet
- Cs1304 Q&A MWDocument35 pagesCs1304 Q&A MWksrajasekarNo ratings yet
- Presented by C.Gokul, Ap/Eee: Departments: Cse, It, Ece, Ece, Mech Regulation: 2013Document633 pagesPresented by C.Gokul, Ap/Eee: Departments: Cse, It, Ece, Ece, Mech Regulation: 2013SATHEESHNo ratings yet
- 8085 Microprocessor IntroductionDocument101 pages8085 Microprocessor IntroductionDonika MarkandeNo ratings yet
- Block Diagram of 8085Document32 pagesBlock Diagram of 8085Shabd ShashankNo ratings yet
- Microprocessor Question BankDocument3 pagesMicroprocessor Question Bankstudy knowledge sumanjayNo ratings yet
- 8085 Assembly Language Programming GuideDocument52 pages8085 Assembly Language Programming GuideNapoleon LygdasNo ratings yet
- EE222 Lecture 13-24 8051 MicrocontrollerDocument94 pagesEE222 Lecture 13-24 8051 MicrocontrollerSalman HadiNo ratings yet
- 1-Architecture of 8085Document34 pages1-Architecture of 8085Pinki KumariNo ratings yet
- 8085 Microprocessor Timing DiagramDocument29 pages8085 Microprocessor Timing DiagramgokulchandruNo ratings yet
- 8085 and 8051 PresentationDocument54 pages8085 and 8051 PresentationJitendra Chuugh100% (3)
- Power Electronics 05 60XXDocument58 pagesPower Electronics 05 60XXwhiteelephant93No ratings yet
- 8085 Microprocessor Architecture, Pin DiagramDocument10 pages8085 Microprocessor Architecture, Pin DiagramSachin Jaysenan0% (1)
- Biomedical Embedded SystemsDocument21 pagesBiomedical Embedded SystemsSathiya KumarNo ratings yet
- Timing Diagrams 8085Document67 pagesTiming Diagrams 8085SaRth Ak100% (1)
- 8051 Microcontroller Architecture and ProgrammingDocument151 pages8051 Microcontroller Architecture and ProgrammingHARISH M 19MTR024No ratings yet
- Motor m49sp 1 eDocument2 pagesMotor m49sp 1 eRené Isaac Martínez OlivaNo ratings yet
- Programming Practices With SimulatorsDocument11 pagesProgramming Practices With Simulatorsarun0% (2)
- Two Mark Questions-MpDocument16 pagesTwo Mark Questions-Mps.reegan0% (1)
- Microprocessor 2marksDocument14 pagesMicroprocessor 2marksManikandan PalaniNo ratings yet
- Model Test Paper 2Document10 pagesModel Test Paper 2sasiNo ratings yet
- MPMC 2marks (Unit 1 To 5) (Q & A)Document32 pagesMPMC 2marks (Unit 1 To 5) (Q & A)Ganapathy Ramadoss100% (2)
- Microprocessor 2 Marks V+Document24 pagesMicroprocessor 2 Marks V+mekalajesiNo ratings yet
- CS2252 – Microprocessor & Microcontroller NotesDocument24 pagesCS2252 – Microprocessor & Microcontroller NotesARUN GOVIND MEDABALIMINo ratings yet
- Micro Question and Explaination ModuleDocument30 pagesMicro Question and Explaination ModuleGemmalyn GanganNo ratings yet
- CS 1304-MICROPROCESSORS 1. What Is Microprocessor? Give The Power SupplyDocument34 pagesCS 1304-MICROPROCESSORS 1. What Is Microprocessor? Give The Power Supplychituuu100% (2)
- Twomarks 141206002903 Conversion Gate02Document27 pagesTwomarks 141206002903 Conversion Gate02roshan2468No ratings yet
- Microprocessor And Microcontroller Document AnalysisDocument35 pagesMicroprocessor And Microcontroller Document AnalysisPRABHVaB100% (1)
- Microprocessor FundamentalsDocument32 pagesMicroprocessor FundamentalsChandreyee MukherjeeNo ratings yet
- Imp MP QuesDocument24 pagesImp MP QuesbhatiaharryjassiNo ratings yet
- Computer Organization - University QuestionsDocument7 pagesComputer Organization - University QuestionsSirisha VamsiNo ratings yet
- Virtual MemoryDocument8 pagesVirtual MemorySirisha VamsiNo ratings yet
- BE-II/IV-Sem-IV Computer Organization - Part-A-2 Marks Questions With Answers-Osmania UniversityDocument15 pagesBE-II/IV-Sem-IV Computer Organization - Part-A-2 Marks Questions With Answers-Osmania UniversitySirisha VamsiNo ratings yet
- Computer Organization GuideDocument22 pagesComputer Organization GuideSirisha VamsiNo ratings yet
- Adobe Scan Apr 29, 2021Document7 pagesAdobe Scan Apr 29, 2021Sirisha VamsiNo ratings yet
- Computer Organization - Lab Viva QuestionsDocument3 pagesComputer Organization - Lab Viva QuestionsSirisha VamsiNo ratings yet
- Gate Level Minimization-Method: Karnaugh MapDocument62 pagesGate Level Minimization-Method: Karnaugh MapSirisha VamsiNo ratings yet
- Introduction To POS: BY Dr. Daggubati SirishaDocument29 pagesIntroduction To POS: BY Dr. Daggubati SirishaSirisha VamsiNo ratings yet
- Adobe Scan Apr 29, 2021Document7 pagesAdobe Scan Apr 29, 2021Sirisha VamsiNo ratings yet
- P RESDocument7 pagesP RESSirisha VamsiNo ratings yet
- Unit-1-Practice Questions-2Document22 pagesUnit-1-Practice Questions-2Sirisha VamsiNo ratings yet
- Quine Mcclusky Method (Tabular Method) : By, DR Daggubati SirishaDocument9 pagesQuine Mcclusky Method (Tabular Method) : By, DR Daggubati SirishaSirisha VamsiNo ratings yet
- Asignment-COs and QuestionsDocument5 pagesAsignment-COs and QuestionsSirisha VamsiNo ratings yet
- CH 12Document5 pagesCH 12Shivani GargNo ratings yet
- Programmable Interval TimerDocument16 pagesProgrammable Interval TimerSirisha VamsiNo ratings yet
- IntroductionDocument14 pagesIntroductionSirisha VamsiNo ratings yet
- Amg Remove - Install Camshaft AdjustersDocument5 pagesAmg Remove - Install Camshaft AdjustersRoland HendriksNo ratings yet
- General Catalogue 2017 - Product Catalogue - ECPEN17-500 - EnglishDocument605 pagesGeneral Catalogue 2017 - Product Catalogue - ECPEN17-500 - Englishasmaa fathyNo ratings yet
- Google Drive Resume Template FreeDocument4 pagesGoogle Drive Resume Template Freec2k2x8ds100% (1)
- GSM PRD BA.50 v5.0 Technology Neutral Agreements HandbookDocument36 pagesGSM PRD BA.50 v5.0 Technology Neutral Agreements HandbookBrimstone HideNo ratings yet
- 218 Choosing The Right Cocoa Container ViewDocument244 pages218 Choosing The Right Cocoa Container ViewShobana MohanasundaramNo ratings yet
- Project Phase1Document19 pagesProject Phase1Lohit DalalNo ratings yet
- Sanitary Clean Steam SeperatorDocument2 pagesSanitary Clean Steam SeperatorShahid AhmedNo ratings yet
- Alicia Cecilia Fonseca ERP Assignment 4Document6 pagesAlicia Cecilia Fonseca ERP Assignment 4Alicia Cecilia FonsecaNo ratings yet
- Isf DF10KDocument1 pageIsf DF10KManh PhamNo ratings yet
- In Order To Live ScriptDocument8 pagesIn Order To Live Scriptapi-644385149No ratings yet
- Gtu MCQ: Dynamics of Machinery (3151911)Document2 pagesGtu MCQ: Dynamics of Machinery (3151911)kannu19802550No ratings yet
- Midterm Exam - Attempt ReviewDocument16 pagesMidterm Exam - Attempt ReviewErick GarciaNo ratings yet
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Help Guide: Xperia 1 II XQ-AT51/XQ-AT52Document134 pagesHelp Guide: Xperia 1 II XQ-AT51/XQ-AT52Jarbas ViníciusNo ratings yet
- Kevin Chou ResumeDocument1 pageKevin Chou Resumeapi-472210762No ratings yet
- The Category Partition MethodDocument11 pagesThe Category Partition MethodAndrew FuNo ratings yet
- Wireless remote controller guide for round flow cassette air conditionerDocument23 pagesWireless remote controller guide for round flow cassette air conditionerSicologo CimeNo ratings yet
- Mobile Phones and Autonomy 2Document30 pagesMobile Phones and Autonomy 2Adliana ColinNo ratings yet
- ISL95829CHRTZDocument74 pagesISL95829CHRTZJavier Marcelo BastetNo ratings yet
- Electrical Machines II: Ahmed Mortuza SalequeDocument14 pagesElectrical Machines II: Ahmed Mortuza SalequeAhsan Kabir NuhelNo ratings yet
- Entice CatalogueDocument12 pagesEntice Cataloguebharath sNo ratings yet
- Kumulative Dissertation Uni WienDocument8 pagesKumulative Dissertation Uni WienWebsitesThatWritePapersForYouSingapore100% (1)
- Prestressed Concrete PolesDocument3 pagesPrestressed Concrete PolesIon Riswan SinagaNo ratings yet
- Dissertation Concours Capitaine PompierDocument5 pagesDissertation Concours Capitaine PompierPaperWritingHelpSyracuse100% (1)
- SevenExcellence UserManual EN FR ES PL IDocument132 pagesSevenExcellence UserManual EN FR ES PL ILanna Dias SilvaNo ratings yet