You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Ir4057b961 01Document92 pagesIr4057b961 01dangkhuyenmaiNo ratings yet
- Acoposinverter p76 Eng-V1.30Document434 pagesAcoposinverter p76 Eng-V1.30dangkhuyenmaiNo ratings yet
- Man Dynamometer Pce Cs 300 en 1125492Document9 pagesMan Dynamometer Pce Cs 300 en 1125492dangkhuyenmaiNo ratings yet
- 2018 Afp Group Short Presentation 3Document20 pages2018 Afp Group Short Presentation 3dangkhuyenmaiNo ratings yet
- Manual: Prepared Solution 9300 Servoplc / EcsxaDocument142 pagesManual: Prepared Solution 9300 Servoplc / EcsxadangkhuyenmaiNo ratings yet
- Replacement Guide From C200H To CS1Document32 pagesReplacement Guide From C200H To CS1dangkhuyenmaiNo ratings yet
- SIREA Products ENDocument2 pagesSIREA Products ENdangkhuyenmaiNo ratings yet
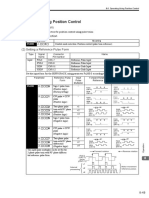
- YASKAWA - SGDMs80000015d - 8 - 1 - Setting in Position Mode ControlDocument5 pagesYASKAWA - SGDMs80000015d - 8 - 1 - Setting in Position Mode ControldangkhuyenmaiNo ratings yet
- Technical: GuideDocument39 pagesTechnical: GuidedangkhuyenmaiNo ratings yet
- Y203 EN2 01 Motion Drives Catalogue 2004Document328 pagesY203 EN2 01 Motion Drives Catalogue 2004dangkhuyenmai100% (1)
- YASKAWA - SGDMs80000015d - 8 - 1 - Parameters ListDocument21 pagesYASKAWA - SGDMs80000015d - 8 - 1 - Parameters ListdangkhuyenmaiNo ratings yet
- Delta PackExpoInnovationStage LCMotionArchitectureSolutions 2017 0926Document32 pagesDelta PackExpoInnovationStage LCMotionArchitectureSolutions 2017 0926dangkhuyenmaiNo ratings yet
- Truncated Trapezoid Velocity Profiles: Neil Birkbeck March 12, 2010Document3 pagesTruncated Trapezoid Velocity Profiles: Neil Birkbeck March 12, 2010dangkhuyenmaiNo ratings yet
- Oem Ap149 - en PDocument4 pagesOem Ap149 - en PdangkhuyenmaiNo ratings yet
- Ds FPX enDocument24 pagesDs FPX endangkhuyenmaiNo ratings yet
- ADTECH QS7 Servo Drive ManualDocument61 pagesADTECH QS7 Servo Drive ManualdangkhuyenmaiNo ratings yet
- Micro830 Controller 2080 LC30 10QVBDocument1 pageMicro830 Controller 2080 LC30 10QVBdangkhuyenmaiNo ratings yet
- PDF-produkte Neu-VACUREMA Inline 2013 09 enDocument9 pagesPDF-produkte Neu-VACUREMA Inline 2013 09 endangkhuyenmai0% (1)
- Adapter Board DM-STF4BB PDFDocument11 pagesAdapter Board DM-STF4BB PDFdangkhuyenmaiNo ratings yet
- CodeVisionAVR User ManualDocument788 pagesCodeVisionAVR User ManualBe NOdNo ratings yet
- Magelis Sto & Stu - Hmis5tDocument1 pageMagelis Sto & Stu - Hmis5tdangkhuyenmaiNo ratings yet
- Elektor (Nonlinear - Ir) 2009-04 PDFDocument88 pagesElektor (Nonlinear - Ir) 2009-04 PDFdangkhuyenmaiNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Assistants API in OpenAI-1Document35 pagesAssistants API in OpenAI-1Yussuf AbdirizakNo ratings yet
- Climaguard™ Air-To-Water Indoor Heat ExchangersDocument12 pagesClimaguard™ Air-To-Water Indoor Heat ExchangersRafraf EzdineNo ratings yet
- 2022 Australian SceneDocument183 pages2022 Australian SceneDirtchirps LNo ratings yet
- BUS 426 Week 9 DBDocument3 pagesBUS 426 Week 9 DBMishrin MishkatNo ratings yet
- Lecture 3Document115 pagesLecture 3shahzodrahmatillayev12No ratings yet
- March 25, 2021 Lesson Plan in Mathematics Grade 8 Content StandardsDocument8 pagesMarch 25, 2021 Lesson Plan in Mathematics Grade 8 Content StandardsJohn Carl AparicioNo ratings yet
- Optimize Your Mobile Game Performance: Unity For Games Unity 2020 Lts Edition - E-BookDocument52 pagesOptimize Your Mobile Game Performance: Unity For Games Unity 2020 Lts Edition - E-BookGameMaker Việt NamNo ratings yet
- Hosteck FolhpromocionalDocument64 pagesHosteck FolhpromocionalYury LorenzNo ratings yet
- PAHS 306: Session 5 - Simple CorrelationDocument14 pagesPAHS 306: Session 5 - Simple CorrelationSuhuyini GaribugliNo ratings yet
- Hand Book of Electronics: January 2010Document16 pagesHand Book of Electronics: January 2010DanyBobNo ratings yet
- PL SQLDocument12 pagesPL SQLIsha ThakreNo ratings yet
- Conic Section DPPDocument63 pagesConic Section DPPRahul Jain87% (23)
- Algorithm Analysis Cheat SheetDocument2 pagesAlgorithm Analysis Cheat Sheeteplusie100% (4)
- Spe 102681 MSDocument9 pagesSpe 102681 MSDenis GontarevNo ratings yet
- STA304 Assignment 1Document5 pagesSTA304 Assignment 1rchen500No ratings yet
- Bidimensional Laminar Ow Around A Circular Cylinder: 3.1 Description of The CaseDocument30 pagesBidimensional Laminar Ow Around A Circular Cylinder: 3.1 Description of The CasemenosoftNo ratings yet
- Cyclical Lever DriveDocument24 pagesCyclical Lever DriveJesus Daniel QuispeNo ratings yet
- WSZ ControllerDocument6 pagesWSZ ControllerAtiqur Rahman AtiqNo ratings yet
- Jobmine ResumeDocument1 pageJobmine ResumeLi XuanjiNo ratings yet
- S4 HW Ans Sheet (CH - 18 Salts and Neutralization) - SDocument3 pagesS4 HW Ans Sheet (CH - 18 Salts and Neutralization) - STSZ HIN CHANNo ratings yet
- Agreement Between SubjectDocument6 pagesAgreement Between SubjectYanaNo ratings yet
- Mind Map Stoikiometri 1Document1 pageMind Map Stoikiometri 1krisna divayana105No ratings yet
- 2SB531Document3 pages2SB531Miguel Angel Díaz CortijoNo ratings yet
- Dehumidifier Technical ManualDocument17 pagesDehumidifier Technical ManualReynaldo FloresNo ratings yet
- Unit 3.4 Gfs and HdfsDocument4 pagesUnit 3.4 Gfs and HdfsIT2025Chinmay KamlaskarNo ratings yet
- L 11 While LoopsDocument19 pagesL 11 While LoopssyazzzrienaNo ratings yet
- Q4 Module 2 Gathering and Organizing Data 2023 2024Document55 pagesQ4 Module 2 Gathering and Organizing Data 2023 2024orazajedediahNo ratings yet
- Phase Measurement Technique For Synchronous Devices in FPGA Using XOR GatesDocument9 pagesPhase Measurement Technique For Synchronous Devices in FPGA Using XOR GatesMuthuNo ratings yet
- ALPEMA Standards Rev1Document8 pagesALPEMA Standards Rev1nattusharanNo ratings yet