You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Aramis: User Manual - SoftwareDocument129 pagesAramis: User Manual - Softwareotipicni6969No ratings yet
- Mini MBA 2020 12 Month ProgrammeDocument8 pagesMini MBA 2020 12 Month Programmelaice100% (1)
- The Importance of Quantitative Research Across FieldsDocument2 pagesThe Importance of Quantitative Research Across FieldsWilson100% (2)
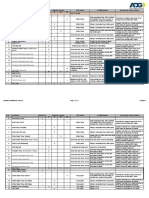
- Construction Issue: Qty. (Nos) AI DI AO DO Hvac System I Water Chilling Units 3Document11 pagesConstruction Issue: Qty. (Nos) AI DI AO DO Hvac System I Water Chilling Units 3Al Amin Hossain Srabon100% (1)
- For BOSCHDocument99 pagesFor BOSCHAdministración DieseltruckNo ratings yet
- How Catholic Art Saved The FaithDocument321 pagesHow Catholic Art Saved The FaithBodega NineteensixtyeightNo ratings yet
- Teachers English Proficiency Test 1Document13 pagesTeachers English Proficiency Test 1Vladimer Desuyo Pionilla100% (1)
- Ktunotes - In: Lecture Notes On Power Generation, Transmission, and DistributionDocument11 pagesKtunotes - In: Lecture Notes On Power Generation, Transmission, and Distributionlakshmi dileepNo ratings yet
- Journal 81Document33 pagesJournal 81ANURAG JOSEPHNo ratings yet
- KATKO Catalogue 2013 ENG S PDFDocument84 pagesKATKO Catalogue 2013 ENG S PDFAlMarsa Electrical ContractNo ratings yet
- Anh 6 Kim Hien Key Kì 2Document18 pagesAnh 6 Kim Hien Key Kì 2Diệu NguyễnNo ratings yet
- Walls Sbu of UnileverDocument25 pagesWalls Sbu of Unilevermaham azizNo ratings yet
- PSY354 Lecture 2 (Anatomy)Document24 pagesPSY354 Lecture 2 (Anatomy)kadiatou konateNo ratings yet
- Week 5 Worksheets Per DevDocument2 pagesWeek 5 Worksheets Per Devdolomite whitesandNo ratings yet
- Pidgin - God's Simple PlanDocument3 pagesPidgin - God's Simple PlanAfrica BiblesNo ratings yet
- Strategic Action Fields of Digital TransformationDocument21 pagesStrategic Action Fields of Digital TransformationHeldi SahputraNo ratings yet
- N4H InvitationLetter - FinalDocument2 pagesN4H InvitationLetter - Finalluis DiazNo ratings yet
- Credentials Evaluation Service Applicant HandbookDocument26 pagesCredentials Evaluation Service Applicant HandbookdramachicNo ratings yet
- About ONGC Global Ranking: HR Vision, Mission & ObjectivesDocument6 pagesAbout ONGC Global Ranking: HR Vision, Mission & ObjectivesShweta AnandNo ratings yet
- Tunnel EngineeringDocument53 pagesTunnel EngineeringshankaregowdaNo ratings yet
- Unit 4 Grammar Standard PDFDocument1 pageUnit 4 Grammar Standard PDFCarolina Mercado100% (2)
- Ma Angela Kristine Valencia - B. Grading Sheet Fili - 8Document1 pageMa Angela Kristine Valencia - B. Grading Sheet Fili - 8Ma. Angela Kristine ValenciaNo ratings yet
- 7 Mobileye PDFDocument4 pages7 Mobileye PDFANDRES MORALESNo ratings yet
- 7 MODULE 7 Nervous SystemDocument29 pages7 MODULE 7 Nervous SystemCHARIEMAE CA�AZARESNo ratings yet
- Chapter 6 Recursion PDFDocument16 pagesChapter 6 Recursion PDFBangtan gurlNo ratings yet
- Summer Internship Project: Scoping of Institutional Banking in Delhi / NCR"Document31 pagesSummer Internship Project: Scoping of Institutional Banking in Delhi / NCR"Sumit AnandNo ratings yet
- 2nd Term SyllabusDocument1 page2nd Term SyllabusBiplab233No ratings yet
- Escala TimpDocument8 pagesEscala TimpLucy GonzalesNo ratings yet
- Physicochemical Characterization of Selected Rice Oryza Sativa Lgenotypes Based On Gel Consistency and Alkali Digestion 2161 1009 1000285 PDFDocument5 pagesPhysicochemical Characterization of Selected Rice Oryza Sativa Lgenotypes Based On Gel Consistency and Alkali Digestion 2161 1009 1000285 PDFJawaria IshfaqNo ratings yet
- CMDBuild WorkflowManual ENG V240 PDFDocument70 pagesCMDBuild WorkflowManual ENG V240 PDFPaco De Peco EdmspjpNo ratings yet