You might also like
- Monarch Nice 1000 ManualDocument177 pagesMonarch Nice 1000 Manualleonardo jimenezNo ratings yet
- EN Water Treatment DR JuhnkeDocument11 pagesEN Water Treatment DR JuhnkeChwiha LakkNo ratings yet
- SIEMENS Sinamics Perfect Harmony gh180 Catalog d17 Global 2018 PDFDocument75 pagesSIEMENS Sinamics Perfect Harmony gh180 Catalog d17 Global 2018 PDFJavier AriasNo ratings yet
- Measurement Accuracy in Network RTKDocument13 pagesMeasurement Accuracy in Network RTKRebi HamzaNo ratings yet
- Signal Processing Method For Distributed SAR Imaging ImprovementDocument4 pagesSignal Processing Method For Distributed SAR Imaging ImprovementJuan Manuel MauroNo ratings yet
- Measurement Accuracy in Network-RTKDocument14 pagesMeasurement Accuracy in Network-RTKRebi HamzaNo ratings yet
- Fardapaper Geolocation Using TDOA and FDOA MeasurementsDocument8 pagesFardapaper Geolocation Using TDOA and FDOA MeasurementsOr ZamirNo ratings yet
- Remote Sensing: Estimation of GPS Di Independent Reference Station and Recursive FilterDocument17 pagesRemote Sensing: Estimation of GPS Di Independent Reference Station and Recursive FilterHamidhy DhytriNo ratings yet
- Modeling Radar On Global Positioning System: Department of Electronics, RTU, IndiaDocument7 pagesModeling Radar On Global Positioning System: Department of Electronics, RTU, IndiaIJRAERNo ratings yet
- Assignment 02 - SCDocument14 pagesAssignment 02 - SCKavindu PereraNo ratings yet
- Geometrically - Based - Statistical - Channel - Model - For - Macrocellular - Mobile - EnvironmentsDocument5 pagesGeometrically - Based - Statistical - Channel - Model - For - Macrocellular - Mobile - Environmentsfayad mohammedNo ratings yet
- Position Estimation For A Mobile Robot Using Data FusionDocument6 pagesPosition Estimation For A Mobile Robot Using Data FusionЋирка ФејзбуџаркаNo ratings yet
- Paper 7 - Polarimetric SAR Image Classification With High Frequency Component Derived From Wavelet Multi Resolution Analysis MRADocument6 pagesPaper 7 - Polarimetric SAR Image Classification With High Frequency Component Derived From Wavelet Multi Resolution Analysis MRAEditor IJACSANo ratings yet
- Gps Simulation Using MatlabDocument30 pagesGps Simulation Using MatlabPrashant Kishore100% (3)
- SAR Interferometry - Principles & Applications (RSChatterjee)Document33 pagesSAR Interferometry - Principles & Applications (RSChatterjee)sgrrsc100% (1)
- Video 6Document9 pagesVideo 6Neural NetNo ratings yet
- 10.GPS Lect.10Document18 pages10.GPS Lect.10tofa abiNo ratings yet
- E023 Generalizations of The Common-Reflection-Surface StackDocument4 pagesE023 Generalizations of The Common-Reflection-Surface Stack828391No ratings yet
- Catia Aided Radome Analysis Using Geometric Optics MethodDocument5 pagesCatia Aided Radome Analysis Using Geometric Optics MethodAbrham Yair Aguilar RodriguezNo ratings yet
- Algorithms For Inverting Radio Occultation Signals in The Neutral AtmosphereDocument14 pagesAlgorithms For Inverting Radio Occultation Signals in The Neutral AtmosphereNashNo ratings yet
- Ares V: No Evidence For Molecular Absorption in The HST Wfc3 Spectrum of GJ 1132 BDocument18 pagesAres V: No Evidence For Molecular Absorption in The HST Wfc3 Spectrum of GJ 1132 BĐứcViệtNguyễnNo ratings yet
- Guided Waves Mode Discrimination in Pipes NDT Based On The Matching Pursuit MethodDocument7 pagesGuided Waves Mode Discrimination in Pipes NDT Based On The Matching Pursuit MethodAndreea-Maria CrinteaNo ratings yet
- The Fuze Doppler Echo Algorithm of Near-Field Electromagnetic Scattering ModelDocument5 pagesThe Fuze Doppler Echo Algorithm of Near-Field Electromagnetic Scattering Modelتپل خستهNo ratings yet
- Cross Eye JammingDocument5 pagesCross Eye JammingGordon Duff100% (2)
- Snow Flake AntennaDocument6 pagesSnow Flake AntennaMyat TheingiNo ratings yet
- ISSFD24 Paper S10-3 BradleyDocument20 pagesISSFD24 Paper S10-3 BradleyfasNo ratings yet
- Mobile Robot Position Determination Using Data Integration of Odometry and GyroscopeDocument9 pagesMobile Robot Position Determination Using Data Integration of Odometry and GyroscopeRangga NaufalNo ratings yet
- Robust Pose Estimation of Moving Objects Using Laser Camera Data For Autonomous Rendezvous & DockingDocument6 pagesRobust Pose Estimation of Moving Objects Using Laser Camera Data For Autonomous Rendezvous & DockingKien Nguyen TrungNo ratings yet
- 2d and 3d Array AntennaDocument5 pages2d and 3d Array AntennaKurtish VenkatiahNo ratings yet
- Crosby 7B3Document7 pagesCrosby 7B3Евгений ПереверзевNo ratings yet
- TRACKING RADARS - 2 - ScribdDocument32 pagesTRACKING RADARS - 2 - ScribdWasif ImranNo ratings yet
- Ultrasonic Lamb WaveDocument12 pagesUltrasonic Lamb WaveMohsin IamNo ratings yet
- Measurement of Gravitational Spin-Orbit Coupling in A Binary Pulsar SystemDocument5 pagesMeasurement of Gravitational Spin-Orbit Coupling in A Binary Pulsar SystemMhd CarrollNo ratings yet
- Optics Communications: Run-Qiu Xia, Xia Wang, Wei-Qi Jin, Jian-An LiangDocument8 pagesOptics Communications: Run-Qiu Xia, Xia Wang, Wei-Qi Jin, Jian-An LiangDedi SuwandiNo ratings yet
- Dilution of PrecisionDocument5 pagesDilution of PrecisionEEpro808No ratings yet
- A Robust Fingerprint Matching Algorithm Using Local AlignmentDocument4 pagesA Robust Fingerprint Matching Algorithm Using Local AlignmentjimakosjpNo ratings yet
- Doppler Characterization For LEO Satellites: Irfan Ali,, Naofal Al-Dhahir,, and John E. HersheyDocument5 pagesDoppler Characterization For LEO Satellites: Irfan Ali,, Naofal Al-Dhahir,, and John E. HersheyhuiodoenNo ratings yet
- Performance Evaluation of Practical Passive Source Localization Using Two Software Defined RadiosDocument4 pagesPerformance Evaluation of Practical Passive Source Localization Using Two Software Defined RadiosGayathri K MNo ratings yet
- Application of The DGPS Method For The Precise PosDocument15 pagesApplication of The DGPS Method For The Precise PosMongoose82No ratings yet
- Satellite Communication Guess PaperDocument2 pagesSatellite Communication Guess PaperSourabh JainNo ratings yet
- The Effects of Faraday Rotation On Backscatter Signatures in SAR Image DataDocument10 pagesThe Effects of Faraday Rotation On Backscatter Signatures in SAR Image DataDenis CarlosNo ratings yet
- Imeko TC10 2014 020Document6 pagesImeko TC10 2014 020nhuNo ratings yet
- Source Localization in Shallow Water in The Presence of Sensor Location UncertaintyDocument6 pagesSource Localization in Shallow Water in The Presence of Sensor Location UncertaintyKalimuthu PaulpandianNo ratings yet
- Chen Et Al. - 2019 - Reconstruction of Local Magnetic Structures by A Modified Radial Basis Function MethodDocument27 pagesChen Et Al. - 2019 - Reconstruction of Local Magnetic Structures by A Modified Radial Basis Function Method31s5kiNo ratings yet
- A Novel Path-Loss Model For UWB Off-Body PropagationDocument5 pagesA Novel Path-Loss Model For UWB Off-Body PropagationHadi RadNo ratings yet
- 3D Cone-Beam CT Reconstruction For Circular TrajectoriesDocument20 pages3D Cone-Beam CT Reconstruction For Circular Trajectoriesmax51sNo ratings yet
- Robot Vision: Y. ShiraiDocument28 pagesRobot Vision: Y. ShiraiRogelio Portillo VelezNo ratings yet
- Abel Inversion1Document28 pagesAbel Inversion1aydinjalaliNo ratings yet
- Underground Diseases Identification of Airport Runway Using GPRDocument5 pagesUnderground Diseases Identification of Airport Runway Using GPRapi-61200414No ratings yet
- Position, Rotation, and SC Ale-Invariant Recognition OF 2-Dimensional Objects Using A Gradient Coding SchemeDocument6 pagesPosition, Rotation, and SC Ale-Invariant Recognition OF 2-Dimensional Objects Using A Gradient Coding Schemekalahassa123No ratings yet
- Lowrie SolutionDocument19 pagesLowrie SolutionVijay Yadav100% (1)
- Ultrafast All-Optical Nth-Order Differentiator and Simultaneous Repetition-Rate Multiplier of Periodic Pulse TrainDocument6 pagesUltrafast All-Optical Nth-Order Differentiator and Simultaneous Repetition-Rate Multiplier of Periodic Pulse Trainmpreciado78No ratings yet
- Research On Simulation of Radar Return From Extended Target: Xiaohui Yu, Pengfei LuoDocument4 pagesResearch On Simulation of Radar Return From Extended Target: Xiaohui Yu, Pengfei LuoAlex YangNo ratings yet
- Pozar. Microwave EngineeringDocument21 pagesPozar. Microwave EngineeringTejaswe KoriviNo ratings yet
- Statistical Evaluation of The Azimuth and Elevation Angles Seen at The Output of The Receiving AntennaDocument6 pagesStatistical Evaluation of The Azimuth and Elevation Angles Seen at The Output of The Receiving AntennaJavier MelendrezNo ratings yet
- ECE174 GPS Computer ProjectDocument5 pagesECE174 GPS Computer ProjectChakshu GautamNo ratings yet
- Simulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathDocument6 pagesSimulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathIon TomitaNo ratings yet
- Doppler and Zeeman Doppler Imaging of StarsDocument28 pagesDoppler and Zeeman Doppler Imaging of StarsPatrik SivakNo ratings yet
- Use of A Laser Tracker To Actively Coordinate The Motion of A 3 Meter Industrial Robot To Within 50 MicronsDocument7 pagesUse of A Laser Tracker To Actively Coordinate The Motion of A 3 Meter Industrial Robot To Within 50 MicronsClenaNo ratings yet
- Pinhole Camera Model: Understanding Perspective through Computational OpticsFrom EverandPinhole Camera Model: Understanding Perspective through Computational OpticsNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Computational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsFrom EverandComputational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsNo ratings yet
- Capillary ActionDocument13 pagesCapillary ActionEvelyn HernándezNo ratings yet
- Two Year CRP 2022-24 PT-1 A Lot Advnace - Paper - 1-SET-ADocument15 pagesTwo Year CRP 2022-24 PT-1 A Lot Advnace - Paper - 1-SET-AAdhyayan DNo ratings yet
- 153 - Down - AY 2020-2021 - B.E. Project DetailsDocument4 pages153 - Down - AY 2020-2021 - B.E. Project DetailsMOVITH CRASTONo ratings yet
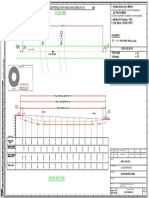
- DWG 001Document1 pageDWG 001Deepak KumarNo ratings yet
- Optimization of Chemical ReactorsDocument23 pagesOptimization of Chemical ReactorsshamimNo ratings yet
- TE Connectivity Splice Cripming and Splice DistributionDocument21 pagesTE Connectivity Splice Cripming and Splice DistributionaafaqueNo ratings yet
- Modul 1 Sukatan MembulatDocument24 pagesModul 1 Sukatan MembulatNova Adila ErizalNo ratings yet
- Fee 6Document35 pagesFee 6Abrha TekaNo ratings yet
- Lab 4Document5 pagesLab 4saba rasheedNo ratings yet
- User Manual: Digital Microstep DriveDocument17 pagesUser Manual: Digital Microstep DriveIlhami DemirNo ratings yet
- Haake W-45 - Thermo Sensors DC30Document69 pagesHaake W-45 - Thermo Sensors DC30Michael MatthewsNo ratings yet
- Installation, Operation, and Maintenance Manual: 0 Series PumpDocument31 pagesInstallation, Operation, and Maintenance Manual: 0 Series PumpTim WorkmanNo ratings yet
- Poisson PracticeDocument2 pagesPoisson PracticeIshtiaq AhmedNo ratings yet
- Final Draft Fpren 15316-4-4: European Standard Norme Européenne Europäische NormDocument27 pagesFinal Draft Fpren 15316-4-4: European Standard Norme Européenne Europäische NormraduvlasaNo ratings yet
- SLM 3 The Six Trigonometric Ratios 22 23Document12 pagesSLM 3 The Six Trigonometric Ratios 22 23Kate Megan ApuliNo ratings yet
- 7b20d0af-82eb-46f3-ad8a-80f9b8917461Document7 pages7b20d0af-82eb-46f3-ad8a-80f9b8917461rmvb7cbfv9No ratings yet
- Chapter 2 - Atoms - Molecules - and IonsDocument53 pagesChapter 2 - Atoms - Molecules - and IonsWarakorn AkarasareenonNo ratings yet
- 12th Class Chapter Coordination Wise QP 2022-23Document8 pages12th Class Chapter Coordination Wise QP 2022-23Gunjan BisenNo ratings yet
- Area Under Curve (AUC)Document2 pagesArea Under Curve (AUC)Tanishq PancholiNo ratings yet
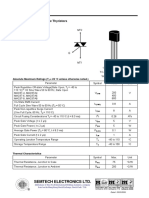
- Datasheet PDFDocument2 pagesDatasheet PDFsergioNo ratings yet
- Reverse Ageing in Hot-Rolled High-Carbon Steel Wire RodDocument7 pagesReverse Ageing in Hot-Rolled High-Carbon Steel Wire RodMada TetoNo ratings yet
- Heat Transfer TheoryDocument32 pagesHeat Transfer TheoryNelson LibidoNo ratings yet
- Aristotle Joseph - 211462101002 Internship ReportDocument43 pagesAristotle Joseph - 211462101002 Internship ReportDoraemonNo ratings yet
- The Witch From Mercury Short Story - The Cradle WorldDocument8 pagesThe Witch From Mercury Short Story - The Cradle WorldIdo ShternNo ratings yet
- Agitator Pumps (LODOS)Document4 pagesAgitator Pumps (LODOS)alexpimi1983No ratings yet
- Module3 TutorialDocument7 pagesModule3 TutorialAayush KNo ratings yet
- Final Book PDFDocument255 pagesFinal Book PDFMohamed SobhNo ratings yet