You might also like
- Best Ref PaperDocument25 pagesBest Ref PaperKanna MonishNo ratings yet
- Human-Robot Collaboration A SurveyDocument21 pagesHuman-Robot Collaboration A SurveyKanna MonishNo ratings yet
- Plagiarism Scan Report: Plagiarised Unique Words CharactersDocument1 pagePlagiarism Scan Report: Plagiarised Unique Words CharactersKanna MonishNo ratings yet
- A 7-Step Guide To Implementing Robotic AutomationDocument2 pagesA 7-Step Guide To Implementing Robotic AutomationKanna MonishNo ratings yet
- Best Practices For Implementing Industrial RobotsDocument3 pagesBest Practices For Implementing Industrial RobotsKanna MonishNo ratings yet
- Human - Robot Collaboration in Industry: MM Science Journal June 2016Document5 pagesHuman - Robot Collaboration in Industry: MM Science Journal June 2016Kanna MonishNo ratings yet
- Foundation For A Classification of Collaboration Levels For Human Robot Cooperation in ManufacturingDocument25 pagesFoundation For A Classification of Collaboration Levels For Human Robot Cooperation in ManufacturingKanna MonishNo ratings yet
- QA Graduate AnnualDocument3 pagesQA Graduate AnnualKanna MonishNo ratings yet
- MRK Leitfaden - EnglishDocument48 pagesMRK Leitfaden - EnglishKanna MonishNo ratings yet
- Framework To Implement Collaborative Robots in Manual Assembly: A Lean Automation ApproachDocument11 pagesFramework To Implement Collaborative Robots in Manual Assembly: A Lean Automation ApproachKanna MonishNo ratings yet
- Tipps On How To Create A ProfileDocument2 pagesTipps On How To Create A ProfileKanna MonishNo ratings yet
- Safety Standards and Collaborative Robots: Pat DavisonDocument32 pagesSafety Standards and Collaborative Robots: Pat DavisonudbarryNo ratings yet
- A Decision Support System For Robot Selection Based On Axiomatic Design PrinciplesDocument11 pagesA Decision Support System For Robot Selection Based On Axiomatic Design PrinciplesKanna MonishNo ratings yet
- En Iso 11161Document2 pagesEn Iso 11161Kishor Deshmukh0% (1)
- Collaborative Robots Comparison Chart - Collaborative Robotics TrendsDocument3 pagesCollaborative Robots Comparison Chart - Collaborative Robotics TrendsKanna MonishNo ratings yet
- B.e.cseDocument107 pagesB.e.cseSangeetha ShankaranNo ratings yet
- Lecture White Board 20201103Document1 pageLecture White Board 20201103Kanna MonishNo ratings yet
- Here Are Your Top 3 Ideal CareersDocument6 pagesHere Are Your Top 3 Ideal CareersKanna MonishNo ratings yet
- Antrag Auf Zulassung Zum StudiumDocument4 pagesAntrag Auf Zulassung Zum StudiumBijoyBanikNo ratings yet
- Rocker Bogie Mechanism: Jukanti Vishwas, Sontireddy SatishDocument6 pagesRocker Bogie Mechanism: Jukanti Vishwas, Sontireddy SatishKanna Monish100% (1)
- Annual Maintenance Program For EnMontoRDocument2 pagesAnnual Maintenance Program For EnMontoRKanna MonishNo ratings yet
- Module Guide Mechatronic and Cyber-Physical SystemsDocument49 pagesModule Guide Mechatronic and Cyber-Physical SystemsMohamed Ashraf BarakaNo ratings yet
- Unit 2 PDFDocument30 pagesUnit 2 PDFKanna MonishNo ratings yet
- Corona - Virus QuestionDocument1 pageCorona - Virus QuestionKanna MonishNo ratings yet
- Corona - Virus QuestionDocument1 pageCorona - Virus QuestionKanna MonishNo ratings yet
- Unit 2 PDFDocument30 pagesUnit 2 PDFKanna MonishNo ratings yet
- NASA/NIA RASC-AL Exploration Robo-Ops Competition: Sample Acquisition SystemDocument1 pageNASA/NIA RASC-AL Exploration Robo-Ops Competition: Sample Acquisition SystemKanna MonishNo ratings yet
- Unit 2 PDFDocument30 pagesUnit 2 PDFKanna MonishNo ratings yet
- Modelling and Dynamic Analysis of Rocker-Bogie Rover For Space ExplorationDocument54 pagesModelling and Dynamic Analysis of Rocker-Bogie Rover For Space ExplorationKanna MonishNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Nurul Alifah Ilyana Binti Che RaniDocument4 pagesNurul Alifah Ilyana Binti Che RaniPISMPPAKK20622 Nurul Alifah Ilyana Binti Che RaniNo ratings yet
- Professional Development For Strategic ManagerDocument11 pagesProfessional Development For Strategic ManagerMaharjanShyam98% (45)
- LaclipDocument29 pagesLaclipZhenru LinNo ratings yet
- Group 3 Regional Variation RevisedDocument17 pagesGroup 3 Regional Variation RevisedHường NguyễnNo ratings yet
- Foreign Stud and Local Lit RechelDocument1 pageForeign Stud and Local Lit RechelMeane BalbontinNo ratings yet
- Special Needs Inclusive Education Strategy - Implementation Guidelines EthiopiaDocument53 pagesSpecial Needs Inclusive Education Strategy - Implementation Guidelines Ethiopiakalpesh deora100% (2)
- CT HandbookDocument30 pagesCT HandbookrezaczNo ratings yet
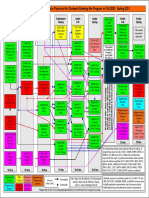
- Mechanicalengineering Sequence Chartfor Fall 2020 To Spring 2021Document1 pageMechanicalengineering Sequence Chartfor Fall 2020 To Spring 2021RonaldNo ratings yet
- Unit 7 - Skills Inventory ActivityDocument11 pagesUnit 7 - Skills Inventory ActivitySAI NARASIMHULUNo ratings yet
- Actionplan On ICT 2022 2023Document1 pageActionplan On ICT 2022 2023Arlen Paden Cano-AgohobNo ratings yet
- What Makes Life Worth LivingDocument34 pagesWhat Makes Life Worth LivingRachelle Mae MendezNo ratings yet
- Formulation of Accounting Standards in India - Steps Taken by ASBDocument8 pagesFormulation of Accounting Standards in India - Steps Taken by ASBSantosh KumarNo ratings yet
- Module 2 Week 2Document9 pagesModule 2 Week 2Mycel Ann AcuzarNo ratings yet
- Riddle Poem of The DayDocument64 pagesRiddle Poem of The DayMilkyWay Jones100% (1)
- R2SEP - Getting Published - Dr. Ferry Jie - 03062021Document26 pagesR2SEP - Getting Published - Dr. Ferry Jie - 03062021daraNo ratings yet
- PSQF4134 EXW SyllabusDocument8 pagesPSQF4134 EXW SyllabusyowaNo ratings yet
- ITU LA PDF - Orj PDFDocument2 pagesITU LA PDF - Orj PDFdeoclNo ratings yet
- Analysis of Pender's Health Promotion Model: Context and Content of The TheoryDocument9 pagesAnalysis of Pender's Health Promotion Model: Context and Content of The TheoryAsih Siti SundariNo ratings yet
- Assessment of Instructional Materials in Teaching and Learning of Financial Accounting in Senior Secondary SchoolsDocument16 pagesAssessment of Instructional Materials in Teaching and Learning of Financial Accounting in Senior Secondary SchoolsArnel MedinaNo ratings yet
- Ebook PDF Understanding Assessing and Teaching Reading A Diagnostic Approach 7th Edition PDFDocument41 pagesEbook PDF Understanding Assessing and Teaching Reading A Diagnostic Approach 7th Edition PDFjimmie.smith693100% (33)
- Spartanburg Day School View BookDocument19 pagesSpartanburg Day School View BookQwertyuıopğüNo ratings yet
- 2014-Eng1a-5400-Johnlo AnnotatedbibDocument15 pages2014-Eng1a-5400-Johnlo Annotatedbibapi-257439507No ratings yet
- PE Lesson 3Document4 pagesPE Lesson 3Rickie Marx RonamoNo ratings yet
- Homeschooling PaperDocument13 pagesHomeschooling Paperapi-509508817No ratings yet
- Goel-Womeneng-I06 6614 WomeninEngineeringinIndia FinalDocument12 pagesGoel-Womeneng-I06 6614 WomeninEngineeringinIndia FinalPranjalNo ratings yet
- CURRICULUM VITAE - Uttam ThapaDocument4 pagesCURRICULUM VITAE - Uttam ThapaRajamanickam SubramanianNo ratings yet
- Learning Activity Sheet 3: Health-Related Fitness Skill-Related FitnessDocument2 pagesLearning Activity Sheet 3: Health-Related Fitness Skill-Related FitnessApriljoy MadridanoNo ratings yet
- 7.013 Introductory Biology Spring, 2016: This Handout IncludesDocument4 pages7.013 Introductory Biology Spring, 2016: This Handout IncludesbesillysillyNo ratings yet
- Ankit KumarDocument1 pageAnkit KumarAnkit YadavNo ratings yet
- David Sparks, CVDocument2 pagesDavid Sparks, CVdsparksNo ratings yet