You might also like
- 约束非线性随机系统局部最优反馈控制的广义迭代 LQG 方法Document7 pages约束非线性随机系统局部最优反馈控制的广义迭代 LQG 方法咸水鱼No ratings yet
- Linear Programming and Model Predictive Control: Christopher V. Rao, James B. RawlingsDocument7 pagesLinear Programming and Model Predictive Control: Christopher V. Rao, James B. Rawlingsranjeet_ranjitdonNo ratings yet
- Control Design Along Trajectories With Sums of Squares ProgrammingDocument8 pagesControl Design Along Trajectories With Sums of Squares Programmingkhushal bhanderiNo ratings yet
- 没有稳定约束的连续时间模型预测控制的递归可行性Document6 pages没有稳定约束的连续时间模型预测控制的递归可行性咸水鱼No ratings yet
- Adaptive Learning Feedback LinearizationDocument9 pagesAdaptive Learning Feedback LinearizationFouad YacefNo ratings yet
- Borelli Predictive Control PDFDocument424 pagesBorelli Predictive Control PDFcharlesNo ratings yet
- Robust Pointwise Min-Norm Control of Distributed Systems With Fluid FlowDocument6 pagesRobust Pointwise Min-Norm Control of Distributed Systems With Fluid FlowdgsdfjkgdfjksnNo ratings yet
- Model-Free RL for Minimal-Cost Variance ControlDocument6 pagesModel-Free RL for Minimal-Cost Variance ControlVrushabh DongeNo ratings yet
- Predictive Control: For Linear and Hybrid SystemsDocument458 pagesPredictive Control: For Linear and Hybrid SystemsSanthosh KumarNo ratings yet
- BBMbook Cambridge NewstyleDocument373 pagesBBMbook Cambridge Newstylejpvieira66No ratings yet
- Fixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesDocument5 pagesFixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesBenny Wijaya NababanNo ratings yet
- Fixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesDocument5 pagesFixed-Time Stabilization For A Wheeled Mobile Robot With Actuator Dead-ZonesBenny Wijaya NababanNo ratings yet
- Linear-Quadratic Regulator (LQR) - WikipediaDocument4 pagesLinear-Quadratic Regulator (LQR) - WikipediaRicardo VillalongaNo ratings yet
- Gain and Phase Margin Multiloop LQG Regulators: TheoryDocument7 pagesGain and Phase Margin Multiloop LQG Regulators: TheoryReta JibatNo ratings yet
- Control of ToysDocument6 pagesControl of ToysYessica RosasNo ratings yet
- Application of GA To Design LQR Controller For An Inverted Pendulum SystemDocument4 pagesApplication of GA To Design LQR Controller For An Inverted Pendulum SystemAnirban GhoseNo ratings yet
- Gain and Phase Margin Multiloop LQG Regulators: TheoryDocument7 pagesGain and Phase Margin Multiloop LQG Regulators: TheoryAyunda RahmayanaNo ratings yet
- Fast Linear Parameter Varying Model Predictive Control of Buck DC-DC Converters Based On FPGADocument13 pagesFast Linear Parameter Varying Model Predictive Control of Buck DC-DC Converters Based On FPGAnhatvpNo ratings yet
- Neural Network Implementation of Nonlinear Receding-Horizon ControlDocument7 pagesNeural Network Implementation of Nonlinear Receding-Horizon ControlGarudaOzoNo ratings yet
- C09 14 Wang Li ICALDocument6 pagesC09 14 Wang Li ICALHuynh Nguyễn ĐìnhNo ratings yet
- Stability analysis of nonlinear repetitive control schemesDocument6 pagesStability analysis of nonlinear repetitive control schemesAyman IsmailNo ratings yet
- Paper 31Document6 pagesPaper 31Daniel G Canton PuertoNo ratings yet
- Adaptive Linearizing Controllers for Rigid RobotsDocument14 pagesAdaptive Linearizing Controllers for Rigid RobotsMed MaxNo ratings yet
- Constrained Model Predictive Control StaDocument26 pagesConstrained Model Predictive Control StaBRIDGET AUHNo ratings yet
- Proceedings 0137Document6 pagesProceedings 0137Andres HernandezNo ratings yet
- º Y'& Yyy Y YYY Yyyyyy Yyyy Y Yyy Y Yyyyyyy YY Yyyyyy Y Y Y Yy Yy Yyy Y Y Yyyyyyyyyyy !"yy &yyy Yyyyy +yyyyyyyDocument11 pagesº Y'& Yyy Y YYY Yyyyyy Yyyy Y Yyy Y Yyyyyyy YY Yyyyyy Y Y Y Yy Yy Yyy Y Y Yyyyyyyyyyy !"yy &yyy Yyyyy +yyyyyyyShaik Saheb ShaikNo ratings yet
- Discrete-time LQR algorithm for cheap and singular control problemsDocument8 pagesDiscrete-time LQR algorithm for cheap and singular control problemsShim JakeNo ratings yet
- The Use of Matlab in The Solution of Linear Quadratic Regulator (LQR) ProblemsDocument18 pagesThe Use of Matlab in The Solution of Linear Quadratic Regulator (LQR) ProblemsAbdesselem BoulkrouneNo ratings yet
- Hybrid LQ-Optimization Using Dynamic Programming: V. Azhmyakov, R. Galvan-Guerra, and M. EgerstedtDocument9 pagesHybrid LQ-Optimization Using Dynamic Programming: V. Azhmyakov, R. Galvan-Guerra, and M. EgerstedtBetaSolDelEsteNo ratings yet
- RoboticsDocument7 pagesRoboticsfggdgNo ratings yet
- Stochastic Feedback Controller Design Considering The Dual EffectDocument13 pagesStochastic Feedback Controller Design Considering The Dual EffectsandeepNo ratings yet
- Robust H output-feedback control of systems with time-delay: 夡 V. Suplin, U. ShakedDocument7 pagesRobust H output-feedback control of systems with time-delay: 夡 V. Suplin, U. ShakedRaminptNo ratings yet
- s12532-017-0119-0Document45 pagess12532-017-0119-0RAHMANI NASR-EDDINENo ratings yet
- Model Predictive ControlDocument460 pagesModel Predictive ControlHarisCausevicNo ratings yet
- Modified Linear Quadratic Bumpless TransferDocument5 pagesModified Linear Quadratic Bumpless Transferlie jamesNo ratings yet
- Stability Analysis of Linear Time-Delay Systems Subject ToDocument8 pagesStability Analysis of Linear Time-Delay Systems Subject ToMoh IneNo ratings yet
- Scenario-Based MPC With Gradual Relaxation of Output ConstraintsDocument5 pagesScenario-Based MPC With Gradual Relaxation of Output ConstraintsAndrés CeverisaeNo ratings yet
- Altro IrosDocument6 pagesAltro IrosvoyageamarsNo ratings yet
- Unreachable Setpoints in MPCDocument7 pagesUnreachable Setpoints in MPCNông DânNo ratings yet
- Kinematic Control of Robots With Noisy Guidance SystemDocument8 pagesKinematic Control of Robots With Noisy Guidance SystemLuis FuentesNo ratings yet
- Intelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsDocument19 pagesIntelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsChernet TugeNo ratings yet
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlsaeedNo ratings yet
- Reliability Based Structural Design: Ton VrouwenvelderDocument9 pagesReliability Based Structural Design: Ton VrouwenvelderFlávio LasmarNo ratings yet
- Kamel 2017Document37 pagesKamel 2017jingNo ratings yet
- Nonlinear Feedback Control FOR Operating A Nonisothermal CSTR Near An Unstable Steady StateDocument8 pagesNonlinear Feedback Control FOR Operating A Nonisothermal CSTR Near An Unstable Steady StateMuhammad HassanNo ratings yet
- Use COMSOL for efficient inverse modeling of aquifersDocument8 pagesUse COMSOL for efficient inverse modeling of aquifersLexin LiNo ratings yet
- Decentralized Nonlinear Model Predictive Control of Multiple Flying RobotsDocument6 pagesDecentralized Nonlinear Model Predictive Control of Multiple Flying RobotsPedro Cezar Rodrigues BaltazarNo ratings yet
- Optimization Landscape of Quantum Control SystemsDocument14 pagesOptimization Landscape of Quantum Control SystemsLucas Adriano Maciel Dos SantosNo ratings yet
- Solution To Industry Benchmark Problems With The Lattice-Boltzmann Code XFlowDocument22 pagesSolution To Industry Benchmark Problems With The Lattice-Boltzmann Code XFlowCFDiran.irNo ratings yet
- PhysRevA 109 032408Document14 pagesPhysRevA 109 032408oscar.negrete.sNo ratings yet
- On The Existence of Stationary Optimal Policies For The Average Cost Control Problem of Linear Systems With Abstract State-FeedbackDocument6 pagesOn The Existence of Stationary Optimal Policies For The Average Cost Control Problem of Linear Systems With Abstract State-Feedbackmjksh62No ratings yet
- Slotine Li Tac 88Document9 pagesSlotine Li Tac 88Linh Chi NguyenNo ratings yet
- Generalized averaging method for analyzing power conversion circuitsDocument9 pagesGeneralized averaging method for analyzing power conversion circuitsLazaro S. EscalanteNo ratings yet
- LQRDocument5 pagesLQRdrjoshreeNo ratings yet
- SMC 06 Alba BarbieriDocument6 pagesSMC 06 Alba BarbieridhineshpNo ratings yet
- 4D Control of Remotely Piloted VehicleDocument6 pages4D Control of Remotely Piloted VehicleFawaz PartoNo ratings yet
- MPC With IntegratorsDocument11 pagesMPC With IntegratorsiksharNo ratings yet
- LMI - PID-Robust PID Controller Design Via LMI Approach - (Ge2002)Document11 pagesLMI - PID-Robust PID Controller Design Via LMI Approach - (Ge2002)PereiraNo ratings yet
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet
- Experimental Analysis of Fractional PID Controller ParametersDocument14 pagesExperimental Analysis of Fractional PID Controller ParametersKuldeep KumarNo ratings yet
- Fuzzy Swing-Up and Fuzzy Sliding-Mode Balance Control For A Planetary-Gear-Type Inverted PendulumDocument11 pagesFuzzy Swing-Up and Fuzzy Sliding-Mode Balance Control For A Planetary-Gear-Type Inverted PendulumKuldeep KumarNo ratings yet
- Mathematical Modelling and Controller Design of Inverted PendulumDocument6 pagesMathematical Modelling and Controller Design of Inverted PendulumKuldeep KumarNo ratings yet
- Hybrid Control Swings Pendulum UprightDocument7 pagesHybrid Control Swings Pendulum UprightKuldeep KumarNo ratings yet
- Adaptive Fuzzy Control of The Inverted Pendulum ProblemDocument10 pagesAdaptive Fuzzy Control of The Inverted Pendulum ProblemKuldeep KumarNo ratings yet
- Real Time Stabilisation Triple Link Inverted: Pendulum Using Single Control InputDocument7 pagesReal Time Stabilisation Triple Link Inverted: Pendulum Using Single Control InputKuldeep KumarNo ratings yet
- Problems Differential EquationsDocument121 pagesProblems Differential EquationsRazes50% (4)
- Final Math9 SLK q1w2 SlacasandileDocument11 pagesFinal Math9 SLK q1w2 Slacasandilehiruma aizenNo ratings yet
- Debashis Chatterjee, J. S. Lather, Lalita Gupta-Wiley Acing The Gate - Electrical Engineering-Wiley India (2016) PDFDocument1,225 pagesDebashis Chatterjee, J. S. Lather, Lalita Gupta-Wiley Acing The Gate - Electrical Engineering-Wiley India (2016) PDFpoulomi ganguly100% (1)
- Math 7 quarterly specsDocument5 pagesMath 7 quarterly specsArianne Joy Villamor MallariNo ratings yet
- Algebra Word Problems Practice Workbook With Full SolutionsDocument343 pagesAlgebra Word Problems Practice Workbook With Full SolutionsmatijahajekNo ratings yet
- Newmark IntegrationDocument12 pagesNewmark IntegrationOvidiu GenteanuNo ratings yet
- Harmonic Form (Worksheet)Document2 pagesHarmonic Form (Worksheet)jeffNo ratings yet
- MJNV1W03 - Business Mathematics: Class Branding 1ADocument18 pagesMJNV1W03 - Business Mathematics: Class Branding 1AKatarina KimNo ratings yet
- GR 4 Unit 1 Extra PracticeDocument4 pagesGR 4 Unit 1 Extra PracticeAnnie NNo ratings yet
- Q-Final SSCE1793 - 1819-1Document7 pagesQ-Final SSCE1793 - 1819-1黄子浩No ratings yet
- Ijmsi v11n2p71 en - 2Document16 pagesIjmsi v11n2p71 en - 2aliNo ratings yet
- Bullet Penetration Into MaterialsDocument26 pagesBullet Penetration Into MaterialsDianna Lambert100% (1)
- Algebra CR 2018 2 PDFDocument4 pagesAlgebra CR 2018 2 PDFJhon AliagaNo ratings yet
- The Most Beautiful Equation BBCDocument1 pageThe Most Beautiful Equation BBCSudan PudasainiNo ratings yet
- Mlxtran: The Model Coding Language For - MonolixDocument40 pagesMlxtran: The Model Coding Language For - MonolixPhaimNo ratings yet
- VTU - B Tech - 18mat21 Advanced Calculus and Numerical Methods - FirstRanker - Com 2Document3 pagesVTU - B Tech - 18mat21 Advanced Calculus and Numerical Methods - FirstRanker - Com 2Monster ManNo ratings yet
- Dpp-1 Graphs (Basic Maths) Physics LinxDocument3 pagesDpp-1 Graphs (Basic Maths) Physics LinxAnjula yadavNo ratings yet
- NonLinSys NSJ MCTDocument19 pagesNonLinSys NSJ MCTshiwapreetheeNo ratings yet
- ODE: Assignment-3Document7 pagesODE: Assignment-3VedprakashNo ratings yet
- Mathematics Multiple Choice QuestionsDocument29 pagesMathematics Multiple Choice QuestionsNadeem KhanNo ratings yet
- Block DiagramsDocument5 pagesBlock DiagramsumairelectNo ratings yet
- Numerical modeling: An introductionDocument8 pagesNumerical modeling: An introductionCorey HeffernanNo ratings yet
- Answers To The Plato Practice TestDocument7 pagesAnswers To The Plato Practice TestJacqueline Turcios50% (6)
- Quadratic Eq. Class 9th Icse ML AggarwalDocument5 pagesQuadratic Eq. Class 9th Icse ML Aggarwalaaravchoudhary8102009No ratings yet
- Slope Equation: Problem 1 of 6Document6 pagesSlope Equation: Problem 1 of 6Nilam DoctorNo ratings yet
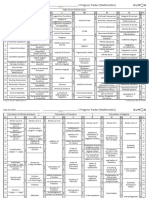
- Kumon Mathematics Progress Tracker Levels C To O PDFDocument2 pagesKumon Mathematics Progress Tracker Levels C To O PDFcharmradeekNo ratings yet
- Mark Scheme (Results) : Summer 2018Document20 pagesMark Scheme (Results) : Summer 2018fatimaNo ratings yet
- Analysis2011 PDFDocument235 pagesAnalysis2011 PDFMirica Mihai AntonioNo ratings yet
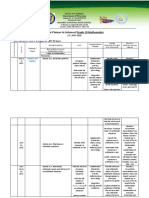
- G10 - Budget of Work - First QuarterDocument11 pagesG10 - Budget of Work - First QuarterRenel MapindanNo ratings yet