You might also like
- PESTEL Analysis of ChinaDocument4 pagesPESTEL Analysis of ChinaJohnny VásquezNo ratings yet
- CalculatorsDocument11 pagesCalculatorsImran RasheedNo ratings yet
- Lepsius R - Discoveries in Egypt, Ethiopia, and The Peninsula of Sinai in The Years 1842 To 1845 - 1853Document486 pagesLepsius R - Discoveries in Egypt, Ethiopia, and The Peninsula of Sinai in The Years 1842 To 1845 - 1853Keith JundeaconNo ratings yet
- IOQ of MetrixDocument36 pagesIOQ of Metrixmkm969No ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Educational Tour Narrative ReportDocument3 pagesEducational Tour Narrative ReportYhan SombilonNo ratings yet
- L.Y.M. Gicquel and O. VermorelDocument8 pagesL.Y.M. Gicquel and O. VermorelzamijakaNo ratings yet
- EngAn3 CFD 2013 14 Lect - 6Document28 pagesEngAn3 CFD 2013 14 Lect - 6raphael.sanchesNo ratings yet
- Accuracy of Sine-Wave Frequency Estimation by An Iterative Interpolated DFT AlgorithmDocument6 pagesAccuracy of Sine-Wave Frequency Estimation by An Iterative Interpolated DFT AlgorithmKassaye GizawNo ratings yet
- Tutorial GFqDecoding Part1Document59 pagesTutorial GFqDecoding Part1darkprince117No ratings yet
- Asp Unit 1Document57 pagesAsp Unit 1Gaurav KumarNo ratings yet
- Chapter 1 Intro PDFDocument35 pagesChapter 1 Intro PDFAriffuddin SaadNo ratings yet
- Michael Parkinson PDFDocument6 pagesMichael Parkinson PDFPepeNo ratings yet
- CLAB1Document4 pagesCLAB1Mohammed GowharNo ratings yet
- MATH3203 Lecture 5 Accuracy of Finite Difference Schemes: Dion WeatherleyDocument6 pagesMATH3203 Lecture 5 Accuracy of Finite Difference Schemes: Dion WeatherleyhellofinNo ratings yet
- TTS Nhom04Document23 pagesTTS Nhom04ĐINH HUY HOÀNGNo ratings yet
- Introduction To ErrorsDocument24 pagesIntroduction To ErrorsStryke LjdNo ratings yet
- Radmi 2009: Research and Development in Mechanical IndustryDocument6 pagesRadmi 2009: Research and Development in Mechanical IndustrySnezana VulovicNo ratings yet
- 3 Chapter 2 Digital FiltersDocument19 pages3 Chapter 2 Digital FiltersVijayasankar AnbalaganNo ratings yet
- Usha Mittal Institute of Technology: SNDT Women'S University MUMBAI - 400049Document26 pagesUsha Mittal Institute of Technology: SNDT Women'S University MUMBAI - 400049shruti chavanNo ratings yet
- ConvergenceDocument13 pagesConvergencenisargNo ratings yet
- 2004 10 Milcom SynchroAndSeqEstimCDMADocument7 pages2004 10 Milcom SynchroAndSeqEstimCDMAfeku fekuNo ratings yet
- Resolution of Singularities For Multi-Loop Integrals: Christian Bogner and Stefan WeinzierlDocument23 pagesResolution of Singularities For Multi-Loop Integrals: Christian Bogner and Stefan WeinzierlWiluam Rutherford BondNo ratings yet
- Dsip Lab Manual Latest UpdatedDocument39 pagesDsip Lab Manual Latest Updatedmanas dhumalNo ratings yet
- Thrun Structure From Sound05Document8 pagesThrun Structure From Sound05recoNo ratings yet
- Btech Electrical 5 Sem Digital Signal Processing Pee5i103 2020Document2 pagesBtech Electrical 5 Sem Digital Signal Processing Pee5i103 2020mrout0333No ratings yet
- Problem Sheet 1Document4 pagesProblem Sheet 1challa_seshagiriNo ratings yet
- Digital Systems 1Document13 pagesDigital Systems 1Yousef IbrahimNo ratings yet
- Lab 05Document14 pagesLab 05Nga V. DaoNo ratings yet
- Research On PD Signals Denoising Based On EMD Method: Yao PEI, Yangang WU, Dacheng JIADocument4 pagesResearch On PD Signals Denoising Based On EMD Method: Yao PEI, Yangang WU, Dacheng JIAThuc VuNo ratings yet
- 2-D Processing of Speech With Application To Pitch EstimationDocument4 pages2-D Processing of Speech With Application To Pitch EstimationRaiatea MoeataNo ratings yet
- SimXpert R3.2 Crash Workspace GuideDocument344 pagesSimXpert R3.2 Crash Workspace Guidepaulkastle100% (1)
- Fluid Mechanics 101: Calculators & ToolsDocument11 pagesFluid Mechanics 101: Calculators & ToolsHaseebPirachaNo ratings yet
- Problem Set 4Document3 pagesProblem Set 4Akshit SharmaNo ratings yet
- 2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseDocument18 pages2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CsehariharankalyanNo ratings yet
- Discrete Time Fourier Series Dtfs 15Document11 pagesDiscrete Time Fourier Series Dtfs 15Alexander BenjaminNo ratings yet
- LS102: Linear Time-Invariant SystemsDocument8 pagesLS102: Linear Time-Invariant SystemsBayar JargalNo ratings yet
- Pamm 201110008Document4 pagesPamm 201110008Dorry PrayogaNo ratings yet
- Te ApDocument2 pagesTe ApAbbas NeelamegamNo ratings yet
- Digital Signal Processing NotesDocument159 pagesDigital Signal Processing NotesuttamNo ratings yet
- National University of Modern Languages, Islamabad Communication System LabDocument7 pagesNational University of Modern Languages, Islamabad Communication System LabImMalikNo ratings yet
- SESA6061 Coursework2 2019Document8 pagesSESA6061 Coursework2 2019Giulio MarkNo ratings yet
- Incert en TransducoresDocument6 pagesIncert en TransducoresEduardo Mejía RomeroNo ratings yet
- Fast Inverse Square RootDocument8 pagesFast Inverse Square RootMaxminlevelNo ratings yet
- Monte Carlo Techniques: 32.1. Sampling The Uniform DistributionDocument7 pagesMonte Carlo Techniques: 32.1. Sampling The Uniform DistributionHuu PhuocNo ratings yet
- Communication Systems 2Document97 pagesCommunication Systems 2Özgür KırcaNo ratings yet
- Virtual Lab 6 - Magnitudes, Phases Everywhere!Document5 pagesVirtual Lab 6 - Magnitudes, Phases Everywhere!Ahmed HamoudaNo ratings yet
- Error Detecting CodesDocument4 pagesError Detecting CodesnqdinhNo ratings yet
- Application FFT-LVDTDocument6 pagesApplication FFT-LVDTnapoleon_velasc3617No ratings yet
- DSP EXP. 5 SolutionDocument10 pagesDSP EXP. 5 Solution01haval 10No ratings yet
- Evaluating Dynamic Stresses of A PipelineDocument8 pagesEvaluating Dynamic Stresses of A PipelinejasminNo ratings yet
- LMS Algorithm It6303 - 4 PDFDocument103 pagesLMS Algorithm It6303 - 4 PDFprakashroutNo ratings yet
- Digital Signal Processing Question Bank 02Document24 pagesDigital Signal Processing Question Bank 02Mathi YuvarajanNo ratings yet
- Digital Signal Processing Question Bank 01Document37 pagesDigital Signal Processing Question Bank 01Mathi YuvarajanNo ratings yet
- DSP ManualDocument43 pagesDSP ManualMaryam MuneebNo ratings yet
- WalshDocument4 pagesWalshonlineanil007No ratings yet
- Digital Signal Processing Important 2 Two Mark Question and Answer IT 1252Document14 pagesDigital Signal Processing Important 2 Two Mark Question and Answer IT 1252startedforfunNo ratings yet
- S and S ReportDocument7 pagesS and S ReportVishal PhadtareNo ratings yet
- High Resolution Schemes: Total Variation Stability and Its Dependence On Smoothness ParameterDocument14 pagesHigh Resolution Schemes: Total Variation Stability and Its Dependence On Smoothness ParameterTati FrancoNo ratings yet
- ECE 461/561-001: Communication Systems Design: R TT E T T E T E TDocument5 pagesECE 461/561-001: Communication Systems Design: R TT E T T E T E TZhenyu HuoNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- CIT 202 - Fundamentals of Multimedia System - Unit 2Document30 pagesCIT 202 - Fundamentals of Multimedia System - Unit 2Noe Jhon SionilloNo ratings yet
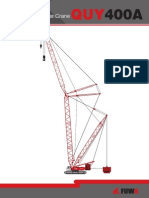
- ERKE Group, FUWA QUY 400A Crawler Crane CatalogDocument104 pagesERKE Group, FUWA QUY 400A Crawler Crane CatalogerkegroupNo ratings yet
- Proposal For Improvement of Infant Toddler Weighing ScaleDocument6 pagesProposal For Improvement of Infant Toddler Weighing ScaleYuna-chan KatsuraNo ratings yet
- Ind Hstry 202131decDocument75 pagesInd Hstry 202131decFaiz ZakaNo ratings yet
- OWP WFRP4e Form Fillable Char Sheet W Calc v2Document3 pagesOWP WFRP4e Form Fillable Char Sheet W Calc v2ggg1991No ratings yet
- ! Free Discord Nitro Codes Generator 2021 - Latest WORKING 100%Document2 pages! Free Discord Nitro Codes Generator 2021 - Latest WORKING 100%nonohaxkingNo ratings yet
- Tungo Sa Bayang Magiliw - 3: Ating Karapatan Sa Batas at Pananagutang PanlipunanDocument25 pagesTungo Sa Bayang Magiliw - 3: Ating Karapatan Sa Batas at Pananagutang PanlipunanAxel GalaNo ratings yet
- 3D Electrocatalysts For Water Splitting: Kaustubh Saxena July 18, 2017Document21 pages3D Electrocatalysts For Water Splitting: Kaustubh Saxena July 18, 2017Yash BansodNo ratings yet
- PHP Cheat SheetDocument2 pagesPHP Cheat SheetEsha ShahNo ratings yet
- ReportDocument33 pagesReportBhavesh JoliyaNo ratings yet
- The Amylose ProjectDocument46 pagesThe Amylose ProjectleahcruzNo ratings yet
- SS-450-72M 144cells: High Efficiency Half-Cell Mono PERC ModuleDocument2 pagesSS-450-72M 144cells: High Efficiency Half-Cell Mono PERC ModuleMatheus FariasNo ratings yet
- Graphene-Based Conducting Inks 2Document3 pagesGraphene-Based Conducting Inks 2VishnuTejaChundiNo ratings yet
- Statement of Account: Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceDocument2 pagesStatement of Account: Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceLoan LoanNo ratings yet
- Research Journal of Internatıonal StudıesDocument16 pagesResearch Journal of Internatıonal StudıesShamsher ShirazNo ratings yet
- Caterpillar 750Document5 pagesCaterpillar 750esilva2021No ratings yet
- Haru CabanDocument494 pagesHaru CabanFrnkKaye BenjaminNo ratings yet
- DLP VIII How Land Masses and Bodies of Water Affects The TyphoonDocument5 pagesDLP VIII How Land Masses and Bodies of Water Affects The TyphoonNellen Bastismo100% (1)
- Code PtitDocument27 pagesCode Ptitđinh trungNo ratings yet
- Language Applied To Volcanic ParticlesDocument3 pagesLanguage Applied To Volcanic Particlesjunior.geologiaNo ratings yet
- Reference Letter For ScholarshipDocument8 pagesReference Letter For Scholarshipjcipchajd100% (2)
- CDM Project in INdonesiaDocument15 pagesCDM Project in INdonesiaarianzNo ratings yet
- OscillatorsDocument3 pagesOscillatorsDanley Rodrigues DantasNo ratings yet
- Integral Representations For Jacobi Polynomials and Some ApplicationsDocument27 pagesIntegral Representations For Jacobi Polynomials and Some ApplicationsRaja SNo ratings yet
- Comparative Vs Absolute AdvantageDocument9 pagesComparative Vs Absolute AdvantageJayesh Kumar YadavNo ratings yet
- Is China A Friend or Foe?: Bachelor ThesisDocument50 pagesIs China A Friend or Foe?: Bachelor ThesisKaige ChenNo ratings yet