You might also like
- Compass 5000.1.12 157605HDocument360 pagesCompass 5000.1.12 157605HApurbajyoti Bora100% (2)
- Python operators and data types quizDocument34 pagesPython operators and data types quizATUL SHARMANo ratings yet
- Vertical Transportation SystemDocument15 pagesVertical Transportation SystemAnupama MorankarNo ratings yet
- DriveDebug User ManualDocument80 pagesDriveDebug User ManualFan CharlesNo ratings yet
- Feedback Control of Dynamic Systems Franklin 7th Edition Solutions ManualDocument36 pagesFeedback Control of Dynamic Systems Franklin 7th Edition Solutions Manualkilter.murk0nj3mx100% (31)
- Impact of Self-Similarity On Wireless Data NetworkDocument6 pagesImpact of Self-Similarity On Wireless Data Networkanonymous50600No ratings yet
- Modeling and Control of Traffic Flows: SciencedirectDocument7 pagesModeling and Control of Traffic Flows: Sciencedirect1419No ratings yet
- Weighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsDocument8 pagesWeighted Subspace Fitting For Two-Dimension DOA Estimation in Massive MIMO SystemsJavier MelendrezNo ratings yet
- 1. Street_Sensors_Set_Selection_through_Road_Network_Modeling_and_Observability_Measures+++Document6 pages1. Street_Sensors_Set_Selection_through_Road_Network_Modeling_and_Observability_Measures+++kamirakiNo ratings yet
- Orjuela SysTol 10Document6 pagesOrjuela SysTol 10p26q8p8xvrNo ratings yet
- Lab2 Monte Carlo SimulationsDocument73 pagesLab2 Monte Carlo SimulationsKhaleda Akhter SathiNo ratings yet
- Sensors-Fpga ProjectDocument24 pagesSensors-Fpga ProjectangelinaNo ratings yet
- IEEE 1999 Conference on Control Applications ProceedingsDocument6 pagesIEEE 1999 Conference on Control Applications ProceedingsShafayat AbrarNo ratings yet
- Akiba2010 Optimal Tracking Control of Two-Wheeled MobileDocument6 pagesAkiba2010 Optimal Tracking Control of Two-Wheeled Mobilechaima bensNo ratings yet
- 2015 A - Reconfiguration - Strategy - For - Reconfigurable - Cable-Driven - Parallel - RobotsDocument8 pages2015 A - Reconfiguration - Strategy - For - Reconfigurable - Cable-Driven - Parallel - RobotsThanh Hai NguyenNo ratings yet
- Efficient Spatio-Temporal Data Association Using Multidimensional Assignment For Multi-Camera Multi-Target TrackingDocument12 pagesEfficient Spatio-Temporal Data Association Using Multidimensional Assignment For Multi-Camera Multi-Target TrackingMaik ShefferNo ratings yet
- Learning For Control From Multiple DemonstrationsDocument10 pagesLearning For Control From Multiple Demonstrationsneha_automaticNo ratings yet
- Null Broadened-Deepened Array Antenna Beamforming For GNSS Jamming Mitigation in Moving PlatformsDocument5 pagesNull Broadened-Deepened Array Antenna Beamforming For GNSS Jamming Mitigation in Moving PlatformsMohamad Farzan SabahiNo ratings yet
- UV Trajectory Tracking Using Neural NetworksDocument4 pagesUV Trajectory Tracking Using Neural Networkssmkumaran90No ratings yet
- Online SLAM Detects Moving ObjectsDocument8 pagesOnline SLAM Detects Moving ObjectsrecoNo ratings yet
- An Effective Chaos-Based Image Watermarking Scheme Using Fractal CodingDocument7 pagesAn Effective Chaos-Based Image Watermarking Scheme Using Fractal CodingsusuelaNo ratings yet
- 3D Localization, Mapping and Path Planning For Search and Rescue OperationsDocument3 pages3D Localization, Mapping and Path Planning For Search and Rescue OperationsbookeepaNo ratings yet
- Constrained Bearings-Only Target Motion Analysis Monte Carlo Markov ChainsDocument10 pagesConstrained Bearings-Only Target Motion Analysis Monte Carlo Markov Chains王大明No ratings yet
- A Dual-Model Fault Detection Approach With Application To Actuators of Robot ManipulatorsDocument6 pagesA Dual-Model Fault Detection Approach With Application To Actuators of Robot ManipulatorsmkannanofficialNo ratings yet
- Position Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotDocument6 pagesPosition Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotVictorSNo ratings yet
- Control of Mobile Platforms Using A Virtual Vehicle ApproachDocument6 pagesControl of Mobile Platforms Using A Virtual Vehicle ApproachKadambini TendulkarNo ratings yet
- Robust Algorithms For Online Convex Problems Via Primal-DualDocument22 pagesRobust Algorithms For Online Convex Problems Via Primal-DualcavemolinaroNo ratings yet
- Analytical Validation of LTE SimulatorDocument5 pagesAnalytical Validation of LTE SimulatorkaviarasanNo ratings yet
- C019 ObserverControllerRobot 4thIASTED ICRM96 HonoluluDocument6 pagesC019 ObserverControllerRobot 4thIASTED ICRM96 HonoluluCostanzo ManesNo ratings yet
- Sandhu11 ACC Tracking LADARDocument8 pagesSandhu11 ACC Tracking LADARRomeil SandhuNo ratings yet
- Robotic Arm Control System For Mars Rover AnalogueDocument5 pagesRobotic Arm Control System For Mars Rover Analoguecntez11No ratings yet
- Blind Deconvolution of DS-CDMA Signals by Means of Decomposition in Rank - (1 L L) TermsDocument10 pagesBlind Deconvolution of DS-CDMA Signals by Means of Decomposition in Rank - (1 L L) Termsfeku fekuNo ratings yet
- 1 s2.0 S2352146515002586 Main PDFDocument9 pages1 s2.0 S2352146515002586 Main PDFJecan CristiNo ratings yet
- ATT13 IeconDocument6 pagesATT13 IeconJohn ArvanitakisNo ratings yet
- Discrete Model of Hybrid Stepper Motor by Optimal State Space ControlDocument8 pagesDiscrete Model of Hybrid Stepper Motor by Optimal State Space ControlJhon Bairon Velásquez MiraNo ratings yet
- Adaptive Neuro Fuzzy ControlDocument4 pagesAdaptive Neuro Fuzzy ControlEga PramNo ratings yet
- Model Based Kalman Filter Mobil - Edouard IvanjkoDocument34 pagesModel Based Kalman Filter Mobil - Edouard Ivanjkonikolics.trashNo ratings yet
- Realtime Autonomous Navigation in V-Rep Based Static and Dynamic Environment Using EKF-SLAMDocument12 pagesRealtime Autonomous Navigation in V-Rep Based Static and Dynamic Environment Using EKF-SLAMIAES International Journal of Robotics and AutomationNo ratings yet
- Real-Time 3D Mapping Algorithm for Multi-Robot SystemsDocument8 pagesReal-Time 3D Mapping Algorithm for Multi-Robot SystemsVishalParekhNo ratings yet
- Trajectory Optimization Satisfying The Robot's Kinodynamic Constraints For Obstacle AvoidanceDocument6 pagesTrajectory Optimization Satisfying The Robot's Kinodynamic Constraints For Obstacle AvoidanceJohn ArvanitakisNo ratings yet
- A Numerical Study of Ship's Rolling MotionDocument9 pagesA Numerical Study of Ship's Rolling Motionreza84No ratings yet
- Real Time Collision Avoidance AlgorithmDocument4 pagesReal Time Collision Avoidance AlgorithmAkash AcharyaNo ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingjayachandradbzNo ratings yet
- Implementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapDocument9 pagesImplementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapMuhammad AdhipatiunusNo ratings yet
- Nonlinear Flight Control of A Two-Degree-of-Freedom Helicopter Using Takagi-Sugeno Fuzzy ModelDocument6 pagesNonlinear Flight Control of A Two-Degree-of-Freedom Helicopter Using Takagi-Sugeno Fuzzy Modelhai zhangNo ratings yet
- WMMSE-based Multiuser MIMO Beamforming: A Practice-Oriented Design and LTE System Performance EvaluationDocument5 pagesWMMSE-based Multiuser MIMO Beamforming: A Practice-Oriented Design and LTE System Performance EvaluationTươi Những Chàng TraiNo ratings yet
- Quasi-Physical Modeling of Robot IRB 120 Using SimDocument17 pagesQuasi-Physical Modeling of Robot IRB 120 Using SimManh Nguyen TienNo ratings yet
- 3D Cable-Based Parallel Robot Simulation Using PDDocument13 pages3D Cable-Based Parallel Robot Simulation Using PDRAZIQ YOUSSEFNo ratings yet
- Improved Separation of Electrocardiography Signals and Mixed MR Images by Using Finite Ridgelet TransformDocument8 pagesImproved Separation of Electrocardiography Signals and Mixed MR Images by Using Finite Ridgelet TransformInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Efficient Soft MIMO Detection Algorithms Based On Differential MetricsDocument5 pagesEfficient Soft MIMO Detection Algorithms Based On Differential MetricsshyamNo ratings yet
- Gantry Robot Kinematic Analysis User Interface Based On Visual Basic and MATLABDocument4 pagesGantry Robot Kinematic Analysis User Interface Based On Visual Basic and MATLABYuva NNo ratings yet
- Maze Solving Algorithms For Micro MouseDocument8 pagesMaze Solving Algorithms For Micro MouseJames BrownNo ratings yet
- Efficient contact planner generates complex motions for legged robotsDocument17 pagesEfficient contact planner generates complex motions for legged robotsralfvandoormaalNo ratings yet
- The Development of TG-8000/8500 Gyrocompass Simulation System Based On Unity3DDocument5 pagesThe Development of TG-8000/8500 Gyrocompass Simulation System Based On Unity3DsanginanNo ratings yet
- Fractional Order Sliding Mode Control Based Chaos Synchronization and Secure CommunicationDocument6 pagesFractional Order Sliding Mode Control Based Chaos Synchronization and Secure CommunicationPRITAM PARALNo ratings yet
- Factor Graphs and The Sum-Product AlgorithmDocument22 pagesFactor Graphs and The Sum-Product AlgorithmR Gowri PrasadNo ratings yet
- ICP-based Pose-Graph SLAM: Ellon Mendes, Pierrick Koch, Simon LacroixDocument7 pagesICP-based Pose-Graph SLAM: Ellon Mendes, Pierrick Koch, Simon LacroixmhahmadNo ratings yet
- Design and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemDocument8 pagesDesign and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemInternational Journal of computational Engineering research (IJCER)No ratings yet
- Proceedings of Spie: The Analysis of Projective Transformation Algorithms For Image Recognition On Mobile DevicesDocument9 pagesProceedings of Spie: The Analysis of Projective Transformation Algorithms For Image Recognition On Mobile DevicesMdSalahUddinYusufNo ratings yet
- Localization of A Unicycle-Like Mobile Robot Using LRF and Omni-Directional CameraDocument7 pagesLocalization of A Unicycle-Like Mobile Robot Using LRF and Omni-Directional CameraPhạm Quốc BảoNo ratings yet
- Dynamic Networks: Models and AlgorithmsDocument15 pagesDynamic Networks: Models and Algorithmsyujay.w.linNo ratings yet
- Model Predictive Control of A Two-Link Robot Arm: El-Hadi GUECHI Samir Bouzoualegh Lotfi Messikh Sašo BlažicDocument6 pagesModel Predictive Control of A Two-Link Robot Arm: El-Hadi GUECHI Samir Bouzoualegh Lotfi Messikh Sašo BlažicAzeddine DemNo ratings yet
- 2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsDocument10 pages2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsMohamed Hechmi JERIDINo ratings yet
- Literature SurveyDocument26 pagesLiterature SurveysumathyNo ratings yet
- 2 Interacting Multiple Model Particle-Type FilteringDocument8 pages2 Interacting Multiple Model Particle-Type FilteringsumathyNo ratings yet
- 5 A Filtering Algorithm For Maneuvering Target TrackingDocument7 pages5 A Filtering Algorithm For Maneuvering Target TrackingsumathyNo ratings yet
- 3 Discrete - Time - Extended - Kalman - FilterDocument6 pages3 Discrete - Time - Extended - Kalman - FiltersumathyNo ratings yet
- Bounds Related To The Riccati Difference Equation For Linear TimeDocument6 pagesBounds Related To The Riccati Difference Equation For Linear TimesumathyNo ratings yet
- Adaptive Unscented Kalman Filter For TargetDocument20 pagesAdaptive Unscented Kalman Filter For TargetsumathyNo ratings yet
- Discrete Time Riccati EquationDocument22 pagesDiscrete Time Riccati EquationsumathyNo ratings yet
- Kalman Filtering With StateDocument9 pagesKalman Filtering With StatesumathyNo ratings yet
- Convergent Properties of Riccati Equation With Application ToDocument8 pagesConvergent Properties of Riccati Equation With Application TosumathyNo ratings yet
- IEEE Transactions on Automatic Control analyzes sensor consultation schemesDocument6 pagesIEEE Transactions on Automatic Control analyzes sensor consultation schemessumathyNo ratings yet
- IEEE Transactions on Automatic Control Filtering Nonstabilizable SystemsDocument9 pagesIEEE Transactions on Automatic Control Filtering Nonstabilizable SystemssumathyNo ratings yet
- A Comparison of Bistatic Bearings-Only Tracking MethodsDocument6 pagesA Comparison of Bistatic Bearings-Only Tracking MethodssumathyNo ratings yet
- Benchmark For RadarDocument18 pagesBenchmark For RadarsumathyNo ratings yet
- Equation: William W. LarryDocument18 pagesEquation: William W. LarrysumathyNo ratings yet
- A NovelinteractingmultiplemodelalgorithmDocument7 pagesA NovelinteractingmultiplemodelalgorithmsumathyNo ratings yet
- The Design and Implement of Acoustic Array Sensor Network Platform For Online Multi-Target TrackingDocument6 pagesThe Design and Implement of Acoustic Array Sensor Network Platform For Online Multi-Target TrackingsumathyNo ratings yet
- Optimal Fusion Estimation With Multi-Step Random DDocument18 pagesOptimal Fusion Estimation With Multi-Step Random DsumathyNo ratings yet
- Comparison and Choice of Models in Tracking Target WithDocument6 pagesComparison and Choice of Models in Tracking Target WithsumathyNo ratings yet
- Performance and Stochastic Stability of The Adaptive Fading Extended Kalman Filter With The Matrix Forgetting FactorDocument12 pagesPerformance and Stochastic Stability of The Adaptive Fading Extended Kalman Filter With The Matrix Forgetting FactorsumathyNo ratings yet
- Riccati Difference Equations in Optimal FilteringDocument8 pagesRiccati Difference Equations in Optimal FilteringsumathyNo ratings yet
- Angular Motion Estimation Using Dynamic ModelsDocument18 pagesAngular Motion Estimation Using Dynamic ModelssumathyNo ratings yet
- An IMM EKF Approach For Enhanced Multi-Target State Estimation For AppDocument13 pagesAn IMM EKF Approach For Enhanced Multi-Target State Estimation For AppsumathyNo ratings yet
- Performance Analysis of Kalman Filter Based Hybrid Estimation AlgorithmDocument6 pagesPerformance Analysis of Kalman Filter Based Hybrid Estimation AlgorithmsumathyNo ratings yet
- Peak Covariance Stability of A Random Riccati EquaDocument12 pagesPeak Covariance Stability of A Random Riccati EquasumathyNo ratings yet
- A Discrete-Time Robust Extended Kalman FilterDocument5 pagesA Discrete-Time Robust Extended Kalman FiltersumathyNo ratings yet
- Ljung - Asymptotic Behavior of EKF As A Parameter Estimator For Linear SystemsDocument15 pagesLjung - Asymptotic Behavior of EKF As A Parameter Estimator For Linear Systemsaleong1No ratings yet
- Periodical Solutions For Extended Kalman Filter'sDocument12 pagesPeriodical Solutions For Extended Kalman Filter'ssumathyNo ratings yet
- A Dynamical Approach of Riccati Difference Equations To Non LinearDocument8 pagesA Dynamical Approach of Riccati Difference Equations To Non LinearsumathyNo ratings yet
- A Dynamical Approach of Riccati Difference Equations To Non LinearDocument8 pagesA Dynamical Approach of Riccati Difference Equations To Non LinearsumathyNo ratings yet
- LV 2000L AD2000 11B 16B Metric Dimension Drawing en 9820 9200 06 Ed00Document1 pageLV 2000L AD2000 11B 16B Metric Dimension Drawing en 9820 9200 06 Ed00FloydMG TecnominNo ratings yet
- Since 1977 Bonds Payable SolutionsDocument3 pagesSince 1977 Bonds Payable SolutionsNah HamzaNo ratings yet
- Viennot - 1979 - Spontaneous Reasoning in Elementary DynamicsDocument18 pagesViennot - 1979 - Spontaneous Reasoning in Elementary Dynamicsjumonteiro2000No ratings yet
- NWQSR - BodyDocument56 pagesNWQSR - BodyRonnie EncarnacionNo ratings yet
- Barcode BasicsDocument3 pagesBarcode Basicsnikhilbajpai_88No ratings yet
- Pro Ducorit UkDocument2 pagesPro Ducorit Uksreeraj1986No ratings yet
- Region VIII - Eastern Visayas Quickstat On: Philippine Statistics AuthorityDocument3 pagesRegion VIII - Eastern Visayas Quickstat On: Philippine Statistics AuthorityBegie LucenecioNo ratings yet
- Body Mechanics and Movement Learning Objectives:: by The End of This Lecture, The Student Will Be Able ToDocument19 pagesBody Mechanics and Movement Learning Objectives:: by The End of This Lecture, The Student Will Be Able TomahdiNo ratings yet
- Teaching Methods in The PhilippinesDocument2 pagesTeaching Methods in The PhilippinesTonee Marie Gabriel60% (5)
- Gorsey Bank Primary School: Mission Statement Mission StatementDocument17 pagesGorsey Bank Primary School: Mission Statement Mission StatementCreative BlogsNo ratings yet
- Super BufferDocument41 pagesSuper Bufferurallalone100% (1)
- Distillation Lab ReportDocument6 pagesDistillation Lab ReportSNo ratings yet
- "Network Security": Alagappa UniversityDocument1 page"Network Security": Alagappa UniversityPRADEEPRAJANo ratings yet
- Aruksha ResumeDocument2 pagesAruksha Resumeapi-304262732No ratings yet
- Bohemian Flower Face Mask by Maya KuzmanDocument8 pagesBohemian Flower Face Mask by Maya KuzmanDorca MoralesNo ratings yet
- Seminar On: Hadoop TechnologyDocument13 pagesSeminar On: Hadoop TechnologySAV SportsNo ratings yet
- P150EDocument4 pagesP150EMauro L. KieferNo ratings yet
- Chapter 2 Research and DesignDocument24 pagesChapter 2 Research and Designalvin salesNo ratings yet
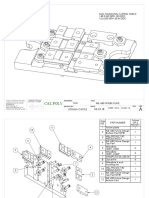
- Fixture Design ProjectDocument4 pagesFixture Design ProjectJosh CastleNo ratings yet
- (Nano and Energy) Gavin Buxton - Alternative Energy Technologies - An Introduction With Computer Simulations-CRC Press (2014) PDFDocument302 pages(Nano and Energy) Gavin Buxton - Alternative Energy Technologies - An Introduction With Computer Simulations-CRC Press (2014) PDFmarcosNo ratings yet
- Connect 4 UML Class DiagramDocument1 pageConnect 4 UML Class DiagramDuy Nguyễn Văn NhậtNo ratings yet
- Stockholm Acc A300 600 2278Document164 pagesStockholm Acc A300 600 2278tugayyoungNo ratings yet
- PBL PgamboaDocument6 pagesPBL PgamboaLeanne Princess GamboaNo ratings yet
- Anubis - Analysis ReportDocument17 pagesAnubis - Analysis ReportÁngelGarcíaJiménezNo ratings yet