You might also like
- Process Conrol 2Document130 pagesProcess Conrol 2SonuNo ratings yet
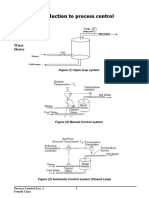
- Chapter 1 Introduction To Process ControlDocument40 pagesChapter 1 Introduction To Process ControlHoàngNo ratings yet
- Process Control ChE3162 Dynamic Systems & Laplace Transfer FunctionsDocument32 pagesProcess Control ChE3162 Dynamic Systems & Laplace Transfer FunctionsZena wNo ratings yet
- ICH 2101 Mass Transfer 1 ModulesDocument79 pagesICH 2101 Mass Transfer 1 ModulesGrace Lukogho MbafumojaNo ratings yet
- Pressure Scals LECTURE 2Document13 pagesPressure Scals LECTURE 2OZIS AcademyNo ratings yet
- Chemical Process Principles (CLB10904) : Chapter 2 Material Balance: (Part 3) : CombustionDocument18 pagesChemical Process Principles (CLB10904) : Chapter 2 Material Balance: (Part 3) : CombustionFATMIENo ratings yet
- Material Balance With Chemical reactions-IIDocument39 pagesMaterial Balance With Chemical reactions-IIThota Venkata Lakshmi Manasa 22120487101No ratings yet
- CE 371 HOMEWORK 2 PRESSURE PROBLEMSDocument4 pagesCE 371 HOMEWORK 2 PRESSURE PROBLEMSPaul LeeNo ratings yet
- Lect.2. Fundamentals of Material BalancesDocument8 pagesLect.2. Fundamentals of Material BalancesBa 4xNo ratings yet
- TemperatureDocument4 pagesTemperatureDr.AhmedNo ratings yet
- Lecture W12 20232Document29 pagesLecture W12 2023214Adi Zawawi AzmanNo ratings yet
- Lect-4-Material Balances With Chemical ReactionDocument23 pagesLect-4-Material Balances With Chemical ReactionBa 4xNo ratings yet
- Transport Phenomena - 2-3 - Vector and Tensor 2 and CoordinatesDocument22 pagesTransport Phenomena - 2-3 - Vector and Tensor 2 and CoordinatesHareritamNo ratings yet
- Chemical Reactor Design Chemical Reactor Design: Y W L Youn-Woo LeeDocument41 pagesChemical Reactor Design Chemical Reactor Design: Y W L Youn-Woo LeePara DiseNo ratings yet
- Principles of Chemical Engineering Calculations ExplainedDocument74 pagesPrinciples of Chemical Engineering Calculations ExplainedAbdla DoskiNo ratings yet
- Chemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 1)Document46 pagesChemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 1)FATMIENo ratings yet
- Lec 2 Fundamentals of Material BalancesDocument73 pagesLec 2 Fundamentals of Material Balancesjan gastiloNo ratings yet
- Chemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 4) : Recycle, Bypass & PurgeDocument25 pagesChemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 4) : Recycle, Bypass & PurgeFATMIENo ratings yet
- Objectives:: Chapter 6: Introduction To Material Balance Material BalancesDocument11 pagesObjectives:: Chapter 6: Introduction To Material Balance Material BalancesFadhillah AnsyariNo ratings yet
- S2 Mass Balance Slides PDFDocument68 pagesS2 Mass Balance Slides PDFعقيل عبدالحسين جاسمNo ratings yet
- Block Diagram of Control System: R e N y UDocument20 pagesBlock Diagram of Control System: R e N y Uমেশকাতুল ইসলাম100% (1)
- Pressure Measurement FundamentalsDocument10 pagesPressure Measurement FundamentalsDr.AhmedNo ratings yet
- Materials and Energy Balance PDFDocument8 pagesMaterials and Energy Balance PDFStephanie Grace QuezadaNo ratings yet
- Lecture 9Document23 pagesLecture 9amirmasoudNo ratings yet
- W1 Energy and Energy BalanceDocument32 pagesW1 Energy and Energy BalanceFatinnnnnnNo ratings yet
- Chemical Process Dynamics and Control SyllabusDocument2 pagesChemical Process Dynamics and Control SyllabusStephen XieNo ratings yet
- Enhanced Single-Loop Control StrategiesDocument26 pagesEnhanced Single-Loop Control Strategiesmeseret sisay100% (1)
- CHAPTER 4 Energy BalanceDocument35 pagesCHAPTER 4 Energy BalanceZafirahAhmadFauziNo ratings yet
- Overview of SISO MIMO Control Systems for Process VariablesDocument16 pagesOverview of SISO MIMO Control Systems for Process VariablesKshitij SoniNo ratings yet
- Ch. 06Document14 pagesCh. 06Dr.Ahmed100% (1)
- Chemical Process PrinciplesDocument6 pagesChemical Process PrinciplesMubashar RehmatNo ratings yet
- Mass Transfer Sample ChaptersDocument29 pagesMass Transfer Sample ChaptersGurunath EpiliNo ratings yet
- J. Chem. Thermodynamics: J. Soujanya, B. Satyavathi, T.E. Vittal PrasadDocument4 pagesJ. Chem. Thermodynamics: J. Soujanya, B. Satyavathi, T.E. Vittal PrasadAngie Paola AcostaNo ratings yet
- Dimensional AnalysisDocument8 pagesDimensional Analysislily august0% (1)
- CourseNotes Section 2Document24 pagesCourseNotes Section 2Ajinkya BhoskarNo ratings yet
- Lect09-Matbal Nonreactive ProcessDocument28 pagesLect09-Matbal Nonreactive ProcessAnasua PalNo ratings yet
- Chapter 1: Introduction To Heat Transfer and Basic Concepts: Faculty of Chemical EngineeringDocument19 pagesChapter 1: Introduction To Heat Transfer and Basic Concepts: Faculty of Chemical EngineeringSunita JobliNo ratings yet
- 28 2 Diff Vec CalcDocument21 pages28 2 Diff Vec CalcSachin AroraNo ratings yet
- Chapter 4Document49 pagesChapter 4Ibrahim Al-HammadiNo ratings yet
- Chapter 1 PDFDocument74 pagesChapter 1 PDFLi Tan100% (1)
- Stoichiometry ProblemsDocument24 pagesStoichiometry Problemsindu prakashNo ratings yet
- Filtration PDFDocument18 pagesFiltration PDFarno6antonio6spinaNo ratings yet
- Principal-Ch 1 PDFDocument31 pagesPrincipal-Ch 1 PDFMaheshree GohilNo ratings yet
- First LawDocument43 pagesFirst Lawviratbansal001No ratings yet
- Mass and Energy Analysis of Control Volumes PDFDocument47 pagesMass and Energy Analysis of Control Volumes PDFrushdiNo ratings yet
- Fogler, H. S., Elements of Chemical Reaction Engineering, Prentice Hall, 1999Document5 pagesFogler, H. S., Elements of Chemical Reaction Engineering, Prentice Hall, 1999Zulaikha AinaNo ratings yet
- Unsteady 3D Flow Past A Cylinder: Created in COMSOL Multiphysics 5.5Document20 pagesUnsteady 3D Flow Past A Cylinder: Created in COMSOL Multiphysics 5.5Luis RiosNo ratings yet
- GATEFLIX Mass TransferDocument122 pagesGATEFLIX Mass TransferVijaykumar JatothNo ratings yet
- Ps2 in PDCDocument3 pagesPs2 in PDClily august0% (1)
- Camphor BallsDocument8 pagesCamphor BallsGurunath EpiliNo ratings yet
- PROP6020 PDocument20 pagesPROP6020 PlukeneerNo ratings yet
- Exp-40 Part2Document22 pagesExp-40 Part2Ahmet Samet ÖzdilekNo ratings yet
- Lecture 2 - 3 - First Order ResponsesDocument31 pagesLecture 2 - 3 - First Order ResponsesLiyana HalimNo ratings yet
- Transfer Function Models: Development of Transfer FunctionsDocument16 pagesTransfer Function Models: Development of Transfer Functions李承家No ratings yet
- Convenient Representation of A Linear, Dynamic Model. - A Transfer Function (TF) Relates One Input and One OutputDocument26 pagesConvenient Representation of A Linear, Dynamic Model. - A Transfer Function (TF) Relates One Input and One Outputmeseret sisayNo ratings yet
- Chapter 3mDocument28 pagesChapter 3mMustafaNo ratings yet
- Transfer Functions ExplainedDocument30 pagesTransfer Functions ExplainedFarooq AhmadNo ratings yet
- Chapter 4Document23 pagesChapter 4AhmadJaffarGulfarazNo ratings yet
- Transfer Functions ExplainedDocument26 pagesTransfer Functions ExplainedpkabandaNo ratings yet
- Chapter 4 (10-6-06) 1Document26 pagesChapter 4 (10-6-06) 1JAN JERICHO MENTOYNo ratings yet
- Chief Architect x6 Reference ManualDocument1,318 pagesChief Architect x6 Reference ManualDaniel JulianNo ratings yet
- AUTOSAR SWS FlashDriverDocument63 pagesAUTOSAR SWS FlashDriverAhmad IbraheemNo ratings yet
- 1200.2 SAS SSD Compatibility Report Summary RevD 2Document14 pages1200.2 SAS SSD Compatibility Report Summary RevD 2haibin qiNo ratings yet
- Ilovepdf Merged AllDocument47 pagesIlovepdf Merged AllAkash VakkayilNo ratings yet
- Google Maps API 3 PolygonDocument3 pagesGoogle Maps API 3 PolygonRajendraNo ratings yet
- JD - Software Developer (C++ - Rust)Document2 pagesJD - Software Developer (C++ - Rust)khanh.elarionNo ratings yet
- Sabai Firmware UpgradeDocument2 pagesSabai Firmware Upgrade00001010No ratings yet
- R&D Process GuideDocument17 pagesR&D Process GuideAngelica MagdaraogNo ratings yet
- Customer Thank You - Flows - KlaviyoDocument1 pageCustomer Thank You - Flows - KlaviyoAdeps SmithsNo ratings yet
- Read multiple query params in JAX-RSDocument51 pagesRead multiple query params in JAX-RSRadheshyam NayakNo ratings yet
- K Cube Design Creative Ai BookDocument164 pagesK Cube Design Creative Ai BookCatch me If u canNo ratings yet
- Ds Ylm72cell HSF Smart-36b 40mm Eu en 20171031 v04Document2 pagesDs Ylm72cell HSF Smart-36b 40mm Eu en 20171031 v04danilohmNo ratings yet
- CyberArk Training Course Content v1Document9 pagesCyberArk Training Course Content v1Mensis LatinsNo ratings yet
- RF Model Tunning GuideDocument13 pagesRF Model Tunning Guideanh00No ratings yet
- Learn Intermediate CSS Responsive DesignDocument3 pagesLearn Intermediate CSS Responsive DesignnitiNo ratings yet
- McDelivery McDonald's Home Delivery Service Launched in Chennai (Company Update)Document2 pagesMcDelivery McDonald's Home Delivery Service Launched in Chennai (Company Update)Shyam SunderNo ratings yet
- Service CatalogDocument10 pagesService CatalogfsouzarjNo ratings yet
- Energy Efficient Electrical TechnologiesDocument15 pagesEnergy Efficient Electrical TechnologiesRahul KolheNo ratings yet
- Powering Wireless NetworksDocument29 pagesPowering Wireless NetworksMohanad MossaNo ratings yet
- R.K.D.F. University, Bhopal: First YearDocument43 pagesR.K.D.F. University, Bhopal: First Yearchetan1nonlyNo ratings yet
- Cyber CafeDocument1 pageCyber Cafeindia4gNo ratings yet
- 4. Implementing IS-IS over IPv6 on IOS-XE and IOS-XRDocument14 pages4. Implementing IS-IS over IPv6 on IOS-XE and IOS-XRachmmygn9No ratings yet
- What Is The Role of Computer in Nursing PracticeDocument14 pagesWhat Is The Role of Computer in Nursing PracticeMuhammad Ali0% (1)
- AT&T Radiated Performance Requirements 20170504054000896Document2 pagesAT&T Radiated Performance Requirements 20170504054000896Vasikaran PrabaharanNo ratings yet
- Vol2 No 2Document148 pagesVol2 No 2IJCNSNo ratings yet
- New Microsoft Word DocumexcvbnntDocument13 pagesNew Microsoft Word Documexcvbnntasdfg7140No ratings yet
- Homework Assignment #1: Boost Converter SimulationDocument2 pagesHomework Assignment #1: Boost Converter Simulationsasa50% (18)
- Strength of Materials AdvancedDocument21 pagesStrength of Materials AdvancedJoe OlsenNo ratings yet
- RS984 - BEX-T1 Spec SHTDocument2 pagesRS984 - BEX-T1 Spec SHTAqui FrkNo ratings yet
- Mock Test & SPOT PRELIMSDocument4 pagesMock Test & SPOT PRELIMSHrid 2No ratings yet