You might also like
- Mingl I 2004Document6 pagesMingl I 2004deepkumar donNo ratings yet
- Broadcast Control Mechanism For Positional Consensus in Multiagent SystemsDocument20 pagesBroadcast Control Mechanism For Positional Consensus in Multiagent SystemsSarathNo ratings yet
- Gombolay RSS 2013Document8 pagesGombolay RSS 2013Jennifer Amutha DavidNo ratings yet
- Workspace Generation For Multifingered ManipulationDocument27 pagesWorkspace Generation For Multifingered ManipulationIvan AvramovNo ratings yet
- Coordinated Motion Planning: Reconfiguring A Swarm of Labeled Robots With Bounded StretchDocument32 pagesCoordinated Motion Planning: Reconfiguring A Swarm of Labeled Robots With Bounded StretchjayaheNo ratings yet
- The Inverse Solution of Dexterous Robot by Using Neural NetworksDocument11 pagesThe Inverse Solution of Dexterous Robot by Using Neural Networksbahaa03No ratings yet
- Learning Robust Dual-Arm Coordination in The Manipulation of Elastic Elements From Intuitive Human DemonstrationsDocument1 pageLearning Robust Dual-Arm Coordination in The Manipulation of Elastic Elements From Intuitive Human Demonstrationscekigad371No ratings yet
- 2020 BioRob ImpedanceDocument8 pages2020 BioRob ImpedanceRavi PrakashNo ratings yet
- Linear Algebra Applied To Kinematic ControlDocument11 pagesLinear Algebra Applied To Kinematic ControlIng. José García, CSSONo ratings yet
- Electronics 12 02928Document23 pagesElectronics 12 02928kurts010No ratings yet
- Nonlinear Bilateral Adaptive Impedance Control With Applications in Telesurgery and TelerehabilitationDocument80 pagesNonlinear Bilateral Adaptive Impedance Control With Applications in Telesurgery and TelerehabilitationEbrahim Abd El HadyNo ratings yet
- Paper Dynamic Path PlanningDocument12 pagesPaper Dynamic Path Planningmahtlactli.gcNo ratings yet
- Deep GaitDocument8 pagesDeep GaitGhanshyam s.nairNo ratings yet
- Minimum-Time Trajectory Planning and Control of A Pick-and-Place Five-Bar Parallel RobotDocument10 pagesMinimum-Time Trajectory Planning and Control of A Pick-and-Place Five-Bar Parallel Robotibrahimgulay15No ratings yet
- Nonlinear Bilateral Adaptive Impedance Control With Applications in Telesurgery and TelerehabilitationDocument80 pagesNonlinear Bilateral Adaptive Impedance Control With Applications in Telesurgery and TelerehabilitationAldo RodNo ratings yet
- Mahesh Final ReportDocument39 pagesMahesh Final ReportRohit Kumar NagoriNo ratings yet
- Edge-Weighted Consensus-Based Formation Control WiDocument19 pagesEdge-Weighted Consensus-Based Formation Control WiAlfonso HernándezNo ratings yet
- Actuation Technologies For Soft Robot Grippers and Manipulators: A ReviewDocument15 pagesActuation Technologies For Soft Robot Grippers and Manipulators: A ReviewXhoniNo ratings yet
- Robotics: Deep Reinforcement Learning For The Control of Robotic Manipulation: A Focussed Mini-ReviewDocument13 pagesRobotics: Deep Reinforcement Learning For The Control of Robotic Manipulation: A Focussed Mini-ReviewHien Bui XuanNo ratings yet
- Systems & Control Letters: Chao Zhai, Gaoxi Xiao, Michael Z.Q. ChenDocument8 pagesSystems & Control Letters: Chao Zhai, Gaoxi Xiao, Michael Z.Q. ChenIndra XenoNo ratings yet
- Design and Development of A Low-Cost Exure-Based Hand-Held Mechanism For MicromanipulationDocument7 pagesDesign and Development of A Low-Cost Exure-Based Hand-Held Mechanism For MicromanipulationDamián Cortina LópezNo ratings yet
- Using a Redundant Master Robot to Enhance Task Performance in Teleoperated SurgeryDocument15 pagesUsing a Redundant Master Robot to Enhance Task Performance in Teleoperated SurgeryAngel RamosNo ratings yet
- A Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingDocument6 pagesA Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingGerardo HernándezNo ratings yet
- Symbiosis of Human and Artifact Y. Anzai, K. Ogawa and H. Mori (Editors) © 1995 Elsevier Science B.V. All Rights ReservedDocument6 pagesSymbiosis of Human and Artifact Y. Anzai, K. Ogawa and H. Mori (Editors) © 1995 Elsevier Science B.V. All Rights ReservedTrong Nhan DoNo ratings yet
- Flwchart Bab3 SSRN-id4255407Document27 pagesFlwchart Bab3 SSRN-id4255407Insannul HakimNo ratings yet
- 1 s2.0 S0921889005001417 ANGPCRMCTRDDocument10 pages1 s2.0 S0921889005001417 ANGPCRMCTRDAngel Hernandez VelascoNo ratings yet
- Bicego2020 Article NonlinearModelPredictiveContro PDFDocument35 pagesBicego2020 Article NonlinearModelPredictiveContro PDFEddylson Aguilar CasquinoNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- Trajectory Planning and Control of Parallel ManipulatorsDocument6 pagesTrajectory Planning and Control of Parallel ManipulatorsChen WilsonNo ratings yet
- Sensors: Estimating Human Wrist Stiffness During A Tooling TaskDocument14 pagesSensors: Estimating Human Wrist Stiffness During A Tooling TaskAdi CrişanNo ratings yet
- A Brachiating Robot ControllerDocument15 pagesA Brachiating Robot Controller舒雯No ratings yet
- Chaotic Motion Planning For Mobile Robots Progress Challenges and OpportunitiesDocument23 pagesChaotic Motion Planning For Mobile Robots Progress Challenges and OpportunitiesJesus Manuel Muñoz PachecoNo ratings yet
- Design and Analysis of An Articulated Robot ArmDocument8 pagesDesign and Analysis of An Articulated Robot ArmSamuel AbraghamNo ratings yet
- Cars 2002 FriconneauDocument6 pagesCars 2002 FriconneauFares MentseurNo ratings yet
- Cluster Space Specification and Control of Mobile Multi-Robot SystemsDocument12 pagesCluster Space Specification and Control of Mobile Multi-Robot SystemsBetoNo ratings yet
- A Multi Objective Control Approach To Online Dual Arm ManipulationDocument6 pagesA Multi Objective Control Approach To Online Dual Arm ManipulationAndru Irfanda YudhantamaNo ratings yet
- Iros 2016 ReplanningDocument9 pagesIros 2016 Replanningbruno.pinto.rosNo ratings yet
- Wlding RobotDocument8 pagesWlding Robotameer hamzaNo ratings yet
- Complex-Systems Design Methodology For Systems-Engineering Collaborative EnvironmentDocument33 pagesComplex-Systems Design Methodology For Systems-Engineering Collaborative EnvironmentwaseheNo ratings yet
- TMECH Shahbazi 2018Document11 pagesTMECH Shahbazi 2018Legis FloyenNo ratings yet
- Electronics 07 00256Document26 pagesElectronics 07 00256tou kaiNo ratings yet
- Designing a Transparent Teleoperation System for Disaster ResponseDocument9 pagesDesigning a Transparent Teleoperation System for Disaster Responseyasirmehmood76No ratings yet
- Kim 1985Document11 pagesKim 1985Trịnh Đàm NhânNo ratings yet
- Kucuk - 2009 - A Dexterity Comparison For 3-DOF Planar Parallel MDocument10 pagesKucuk - 2009 - A Dexterity Comparison For 3-DOF Planar Parallel MDurgesh Haribhau SalunkheNo ratings yet
- Heterogeneous Robot Networks for Search and RescueDocument6 pagesHeterogeneous Robot Networks for Search and RescueCristhian Adalberto Carrillo moraNo ratings yet
- A Geometric Approach For Inverse Kinematics of A 4 Link Redundant in Vivo RobotDocument20 pagesA Geometric Approach For Inverse Kinematics of A 4 Link Redundant in Vivo Robotccxvcvcxvv fsdff sdNo ratings yet
- Automatic Deployment of Distributed Teams of Robots From Temporal Logic Motion SpecificationsDocument14 pagesAutomatic Deployment of Distributed Teams of Robots From Temporal Logic Motion SpecificationsAnamaria HutuleacNo ratings yet
- Me326 Individual ProjectDocument5 pagesMe326 Individual Projectapi-582462159No ratings yet
- Med16 2Document7 pagesMed16 2Haile SimachewNo ratings yet
- Robust Hybrid Positionforce Control of Redundant Robots 1999Document17 pagesRobust Hybrid Positionforce Control of Redundant Robots 1999Syafri GtNo ratings yet
- Preliminary Design of A Three-Finger Underactuated Adaptive End Effector With A Breakaway Clutch MechanismDocument8 pagesPreliminary Design of A Three-Finger Underactuated Adaptive End Effector With A Breakaway Clutch MechanismSelva LakshmiNo ratings yet
- Whole-body Motion Planning Building BlocksDocument32 pagesWhole-body Motion Planning Building BlockssteffenspmNo ratings yet
- Design and Implementation of A Robotic Arm Using Ros and Moveit!Document6 pagesDesign and Implementation of A Robotic Arm Using Ros and Moveit!NIKHIL SHINDENo ratings yet
- Compliant Manipulators Springer 2014Document64 pagesCompliant Manipulators Springer 2014Alejandro GastonNo ratings yet
- Control and Control Theory For Flexible RobotsDocument8 pagesControl and Control Theory For Flexible RobotsGIYEONGNo ratings yet
- Optimizing and Deciphering Design Principles of Robot Gripper Configurations Using An Evolutionary Multi-Objective Optimization MethodDocument10 pagesOptimizing and Deciphering Design Principles of Robot Gripper Configurations Using An Evolutionary Multi-Objective Optimization MethodVeronicaNistorNo ratings yet
- Point-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsDocument9 pagesPoint-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Prototype System For Robust, Interactive and User-Friendly Modeling of Orientable 2-Manifold MeshesDocument8 pagesA Prototype System For Robust, Interactive and User-Friendly Modeling of Orientable 2-Manifold MeshesJemnaseeNo ratings yet
- Mobile Robot Architectures EvaluationDocument17 pagesMobile Robot Architectures EvaluationShujat AliNo ratings yet
- Datasheet - GO 5100 PGEDocument2 pagesDatasheet - GO 5100 PGEhuynh nguyen dinhNo ratings yet
- Osipov 1988Document7 pagesOsipov 1988huynh nguyen dinhNo ratings yet
- PreviewDocument24 pagesPreviewhuynh nguyen dinhNo ratings yet
- Chittawadigi 2013Document6 pagesChittawadigi 2013huynh nguyen dinhNo ratings yet
- Patel 2005Document21 pagesPatel 2005huynh nguyen dinhNo ratings yet
- 1357 Redundant Inverse Kinematics Experimental Comparative Review and Two EnhancementsDocument8 pages1357 Redundant Inverse Kinematics Experimental Comparative Review and Two Enhancementshuynh nguyen dinhNo ratings yet
- Collision Detection of Cylindrical Rigid Bodies For Motion PlannDocument6 pagesCollision Detection of Cylindrical Rigid Bodies For Motion Plannhuynh nguyen dinhNo ratings yet
- GJK Distance Algorithm ExplainedDocument4 pagesGJK Distance Algorithm Explainedhuynh nguyen dinhNo ratings yet
- Cao Hoc Co Dien Tu - Session 4 - 02 - 0001Document4 pagesCao Hoc Co Dien Tu - Session 4 - 02 - 0001huynh nguyen dinhNo ratings yet
- Collision Detection Between Geometric Models: A SurveyDocument20 pagesCollision Detection Between Geometric Models: A Surveyhuynh nguyen dinhNo ratings yet
- Bai Tap Gioi Han Ham So 11Document5 pagesBai Tap Gioi Han Ham So 11huynh nguyen dinhNo ratings yet
- Motion Tasks for Robot Manipulators on Embedded SurfacesDocument7 pagesMotion Tasks for Robot Manipulators on Embedded Surfaceshuynh nguyen dinhNo ratings yet
- Tesis Doctoral: Emetic Pproach To The Nverse Inematics Roblem For Obotic PplicationsDocument198 pagesTesis Doctoral: Emetic Pproach To The Nverse Inematics Roblem For Obotic Pplicationshuynh nguyen dinhNo ratings yet
- 7 Wonders SoloPlay RulesDocument5 pages7 Wonders SoloPlay Ruleshuynh nguyen dinhNo ratings yet
- Obstacle Avoidance For Kinematically Redundant ManDocument7 pagesObstacle Avoidance For Kinematically Redundant Manhuynh nguyen dinhNo ratings yet
- RaktutorialpersianDocument84 pagesRaktutorialpersianhuynh nguyen dinhNo ratings yet
- A Lagrangian Network For Kinematic Control of Redundant Robot ManipulatorsDocument10 pagesA Lagrangian Network For Kinematic Control of Redundant Robot Manipulatorshuynh nguyen dinhNo ratings yet
- Install Cái Gì ĐóDocument8 pagesInstall Cái Gì Đóhuynh nguyen dinhNo ratings yet
- Introduction To Robotics: Lasse Einig, Jianwei ZhangDocument51 pagesIntroduction To Robotics: Lasse Einig, Jianwei Zhanghuynh nguyen dinhNo ratings yet
- Rigid Bodies Mechanics ChapterDocument8 pagesRigid Bodies Mechanics ChapterPhúc Lộc NguyễnNo ratings yet
- I Know You Got Soul - Machines With That - Clarkson - JeremyDocument87 pagesI Know You Got Soul - Machines With That - Clarkson - JeremyAlvaro VeasNo ratings yet
- Heat & Thermodynamics (ADV)Document99 pagesHeat & Thermodynamics (ADV)xibojof446No ratings yet
- Engineering Science: Dynamics (Newton's Second Law, Force, Inertia)Document39 pagesEngineering Science: Dynamics (Newton's Second Law, Force, Inertia)DRAGON LAMNo ratings yet
- Physics Grade 11 Physics Ch12 Force Momentum and ImpulseDocument112 pagesPhysics Grade 11 Physics Ch12 Force Momentum and Impulseapi-19999615No ratings yet
- Granular FlowsDocument30 pagesGranular FlowsIhtisham HassanNo ratings yet
- Fizik MechanicsDocument51 pagesFizik MechanicsarmNo ratings yet
- Hsslive-physics-Plus One Chapter6Document15 pagesHsslive-physics-Plus One Chapter6kavya shreeNo ratings yet
- Physics 1st YearDocument2 pagesPhysics 1st YearRashid JalalNo ratings yet
- Classical Mechanics Exam ProblemsDocument95 pagesClassical Mechanics Exam ProblemsMaqsood Khan KhattakNo ratings yet
- Mechanics Experiments GuideDocument14 pagesMechanics Experiments GuideccmejiaNo ratings yet
- 7 Models-I PU PhysicsDocument40 pages7 Models-I PU PhysicsMir RayyanNo ratings yet
- USAPhO Problems (2007-2014)Document311 pagesUSAPhO Problems (2007-2014)Science Olympiad Blog95% (19)
- Kinetic Theory of Gases, PradeepDocument44 pagesKinetic Theory of Gases, PradeepArun100% (2)
- Momentum Report FinalDocument43 pagesMomentum Report FinalMarArizalaNo ratings yet
- OH - DSE - 2025-PHY X1 PHY - EnergyDocument16 pagesOH - DSE - 2025-PHY X1 PHY - EnergySeanNo ratings yet
- P2-QP NaraayanaDocument25 pagesP2-QP NaraayanaazeemNo ratings yet
- Physics Malaysian Matriculation Semester 1 Notes CompleteDocument474 pagesPhysics Malaysian Matriculation Semester 1 Notes CompleteJay Bee96% (68)
- Practical Booklet 2019Document118 pagesPractical Booklet 2019Kenneth Knight100% (1)
- Topic2 - P1 MSDocument65 pagesTopic2 - P1 MSAmina RakhaNo ratings yet
- DNV-RP-F203 Riser Interference April 2009Document22 pagesDNV-RP-F203 Riser Interference April 2009TroyNo ratings yet
- Conservation of Linear Momentum (Lab Report)Document5 pagesConservation of Linear Momentum (Lab Report)Arseniojakejr FloresNo ratings yet
- Collisions and Centre of Mass PDFDocument5 pagesCollisions and Centre of Mass PDFJon snowNo ratings yet
- Chen Guang, - Yap Fook Fah - An Introduction To Planar Dynamics-Cengage Learning Asia (2014)Document308 pagesChen Guang, - Yap Fook Fah - An Introduction To Planar Dynamics-Cengage Learning Asia (2014)Stubby DubNo ratings yet
- Multiple Choice Solutions To The AP Physics B Exam 1993Document16 pagesMultiple Choice Solutions To The AP Physics B Exam 1993José Luis Salazar EspitiaNo ratings yet
- Principles of Physics A Calculus Based Text 5Th Edition Serway Test Bank Full Chapter PDFDocument42 pagesPrinciples of Physics A Calculus Based Text 5Th Edition Serway Test Bank Full Chapter PDFJasonMoralesykcx100% (8)
- Broshures Phywe Tess Phy 2010Document310 pagesBroshures Phywe Tess Phy 2010Denis PANo ratings yet
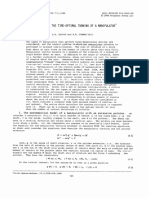
- Chap. 18 Rotation in Two Dimensions: 1. The Choo-Choog Machine (IV) : Torque and Angular MomentumDocument12 pagesChap. 18 Rotation in Two Dimensions: 1. The Choo-Choog Machine (IV) : Torque and Angular MomentumfudogNo ratings yet
- Physics 2008Document85 pagesPhysics 2008Muhammad Qasim100% (1)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet
- Autodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersFrom EverandAutodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersNo ratings yet
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Design Research Through Practice: From the Lab, Field, and ShowroomFrom EverandDesign Research Through Practice: From the Lab, Field, and ShowroomRating: 3 out of 5 stars3/5 (7)