You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- PRR e 2021 12 Responsive Emails - RedactedDocument83 pagesPRR e 2021 12 Responsive Emails - RedactedDaily KosNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Multiple Choice QuestionsDocument33 pagesMultiple Choice QuestionsJananiNo ratings yet
- Advanced Engineering & Design : Local Representation - Close To YouDocument2 pagesAdvanced Engineering & Design : Local Representation - Close To Youjeosn95100% (2)
- 2020 Syllabi TemplateDocument12 pages2020 Syllabi TemplateMatt Joseph Cabanting100% (1)
- Computer Laboratory: List of ActivitiesDocument2 pagesComputer Laboratory: List of ActivitiesJohn Carlo GumayanNo ratings yet
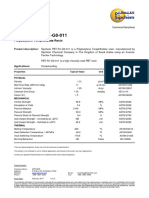
- Sipchem PBT-R1-G0-011: Polybutylene Terephthalate ResinDocument1 pageSipchem PBT-R1-G0-011: Polybutylene Terephthalate ResinTahir IqbalNo ratings yet
- CAD Slides 02Document45 pagesCAD Slides 02KyogbsyNo ratings yet
- Cranes InspectionDocument2 pagesCranes InspectionMahmoud AbdallahNo ratings yet
- Manual ContentDocument125 pagesManual ContentJhon Vincent BuragaNo ratings yet
- Triaxial Shear TestDocument24 pagesTriaxial Shear Testrahul kumarNo ratings yet
- Script NouDocument4 pagesScript NouHurjui DenisaNo ratings yet
- Programming With VTKDocument25 pagesProgramming With VTKMarko DimitrijeNo ratings yet
- SAA TroubleshootingDocument42 pagesSAA TroubleshootingWeerapong PumngernNo ratings yet
- Tadano All Terrain Crane Ar 1000m 1 Wfn4rtbn1 r4080131 Operation Manual 2000 enDocument22 pagesTadano All Terrain Crane Ar 1000m 1 Wfn4rtbn1 r4080131 Operation Manual 2000 enhaileyhermanmd041286ydn100% (120)
- Contoh Prosedur TeksDocument23 pagesContoh Prosedur Teksaswita M putriNo ratings yet
- UMTS-WCDMA RF Planning and Network Optimization1Document6 pagesUMTS-WCDMA RF Planning and Network Optimization1Bouziane BeldjilaliNo ratings yet
- Kaur & Kapuria (2020)Document21 pagesKaur & Kapuria (2020)Leonardo VelizNo ratings yet
- Menentukan Dimensi Baja - Baja Tabel-Berat-BesiDocument46 pagesMenentukan Dimensi Baja - Baja Tabel-Berat-BesiAhmed VadlanNo ratings yet
- Week-7 - Os LabDocument3 pagesWeek-7 - Os LabRajeswaranaidu DarsiNo ratings yet
- Project Name: Arwa Tower: Methods Statement For Installation of Granite WorksDocument7 pagesProject Name: Arwa Tower: Methods Statement For Installation of Granite WorksWaseem HamadNo ratings yet
- Questions DE-1Document9 pagesQuestions DE-1Riddhesh PatilNo ratings yet
- Chapter 11 - Accounts From Incomplete RecordsDocument15 pagesChapter 11 - Accounts From Incomplete RecordsShaji SNo ratings yet
- National JNR Instrument EngineerDocument2 pagesNational JNR Instrument EngineerFajar N AkbarNo ratings yet
- CPK Index Vs PPM Sigma LevelDocument4 pagesCPK Index Vs PPM Sigma LevelDearRed FrankNo ratings yet
- Bonus Est Dominus PalestrinaDocument1 pageBonus Est Dominus PalestrinaJimwell OlarteNo ratings yet
- 4.contoh Soal Chapter 4 Where's The CafeDocument5 pages4.contoh Soal Chapter 4 Where's The Cafepriyo cirebonNo ratings yet
- SKF CouplingDocument16 pagesSKF CouplingmatchutNo ratings yet
- The Design and Implementation of Lion BatteryDocument9 pagesThe Design and Implementation of Lion BatteryFrancesco TedescoNo ratings yet
- JD Series P-Tool Engineering DataDocument1 pageJD Series P-Tool Engineering Dataazze bouzNo ratings yet
- Typical Functional Diagrams Rev0C PDFDocument76 pagesTypical Functional Diagrams Rev0C PDFñao manaoNo ratings yet