You might also like
- Introduction to Machine Learning in 40 CharactersDocument59 pagesIntroduction to Machine Learning in 40 CharactersJAYACHANDRAN J 20PHD0157No ratings yet
- ML Unit 1-NotesDocument21 pagesML Unit 1-NotesAbhi ReddyNo ratings yet
- Unit I Notes Machine Learning Techniques 1Document21 pagesUnit I Notes Machine Learning Techniques 1Ayush SinghNo ratings yet
- Data Science 5Document216 pagesData Science 5Akhil Reddy100% (2)
- DS Mod 1 To 2 Complete NotesDocument63 pagesDS Mod 1 To 2 Complete NotesAnish ChoudharyNo ratings yet
- ML Notes TBDocument5 pagesML Notes TBrayudu shivaNo ratings yet
- Machine Learning ModelsDocument56 pagesMachine Learning ModelsSHIKHA SHARMA100% (1)
- Unit I MACHINE LEARNINGDocument87 pagesUnit I MACHINE LEARNINGapurvaNo ratings yet
- Machine Learning Decision Tree QuestionsDocument2 pagesMachine Learning Decision Tree Questionsmohammed talibNo ratings yet
- Lec-1 ML IntroDocument15 pagesLec-1 ML IntroSimanta HazraNo ratings yet
- Merge +1Document107 pagesMerge +1SHIKHA SHARMANo ratings yet
- Unit 4 - DSADocument9 pagesUnit 4 - DSARoshanaa R100% (1)
- Cs601pc - Machine Learning Unit - 1-3Document155 pagesCs601pc - Machine Learning Unit - 1-3RADHARAPU DIVYA PECNo ratings yet
- ML First UnitDocument70 pagesML First UnitLohit PNo ratings yet
- Combined MLDocument705 pagesCombined MLAbhishekNo ratings yet
- Fundamentals of Data ScienceDocument62 pagesFundamentals of Data ScienceDr. C. Deepa HoD AI&DS100% (1)
- UNSUPERVISED LEARNING AND DIMENSIONALITY REDUCTIONDocument58 pagesUNSUPERVISED LEARNING AND DIMENSIONALITY REDUCTIONSanaullahSunnyNo ratings yet
- AI Important QuestionsDocument196 pagesAI Important QuestionsTushar GuptaNo ratings yet
- GTU Machine Learning CourseDocument2 pagesGTU Machine Learning CourseEr Umesh ThoriyaNo ratings yet
- Introduction of Ethical HackingDocument8 pagesIntroduction of Ethical HackingNair ShreejaNo ratings yet
- Data Mining - IMT Nagpur-ManishDocument82 pagesData Mining - IMT Nagpur-ManishSumeet GuptaNo ratings yet
- Data Mining Techniques and ApplicationsDocument31 pagesData Mining Techniques and Applicationstexxas100% (1)
- Machine Learning GuideDocument31 pagesMachine Learning GuideSana AkramNo ratings yet
- Lecture 14 AutoencodersDocument39 pagesLecture 14 AutoencodersDevyansh Gupta100% (1)
- UE20CS302 Unit4 SlidesDocument312 pagesUE20CS302 Unit4 SlidesDRUVA HegdeNo ratings yet
- 22CS302 - UNIT 1 To 3 - MaterialDocument93 pages22CS302 - UNIT 1 To 3 - MaterialChandru ManiNo ratings yet
- Basic Data Science Interview Questions ExplainedDocument38 pagesBasic Data Science Interview Questions Explainedsahil kumarNo ratings yet
- ML Overview NotesDocument23 pagesML Overview NotesSAHINNo ratings yet
- Machine Learning Techniques QuantumDocument159 pagesMachine Learning Techniques QuantumVarshika GangwarNo ratings yet
- 02 Machine Learning OverviewDocument103 pages02 Machine Learning OverviewDhouha BenzinaNo ratings yet
- Data ScienceDocument52 pagesData Sciencekarthik rs100% (2)
- For Unit 4 UsefulDocument107 pagesFor Unit 4 Usefulshilpa dirisalaNo ratings yet
- A Basic Introduction To Machine Learning and Data Analytics: Yolanda Gil University of Southern CaliforniaDocument118 pagesA Basic Introduction To Machine Learning and Data Analytics: Yolanda Gil University of Southern CaliforniaAbokhaled AL-ashmawiNo ratings yet
- Big Data Anlaytics: Unit 1 & 2 - Question Bank MCQ'sDocument4 pagesBig Data Anlaytics: Unit 1 & 2 - Question Bank MCQ'sujyNo ratings yet
- Accident Detection Using Mobile PhoneDocument4 pagesAccident Detection Using Mobile PhoneHrishikesh BasutkarNo ratings yet
- Machine Learning Techniques and ApplicationsDocument113 pagesMachine Learning Techniques and ApplicationsRamakrishnaRao SoogooriNo ratings yet
- Artifical Intelligence and Expert SystemsDocument60 pagesArtifical Intelligence and Expert SystemsHrihe PlacementNo ratings yet
- SCSA3015 Deep Learning Unit 2 PDFDocument32 pagesSCSA3015 Deep Learning Unit 2 PDFpooja vikirthiniNo ratings yet
- Machine LearningDocument17 pagesMachine Learningrishabh071001No ratings yet
- DWM Unit3Document54 pagesDWM Unit3Manimozhi PalanisamyNo ratings yet
- 18AI61Document3 pages18AI611DT20AI026 MOHAMMED ZABIULLAH CNo ratings yet
- Dataming T PDFDocument48 pagesDataming T PDFKimhorng HornNo ratings yet
- Dev Answer KeyDocument17 pagesDev Answer Keyjayapriya kce100% (1)
- Machine Learning NotesDocument15 pagesMachine Learning NotesxyzabsNo ratings yet
- Machine LearningDocument46 pagesMachine LearningCharmil Gandhi100% (1)
- DMWH M1Document25 pagesDMWH M1vani_V_prakashNo ratings yet
- Core Java MaterialDocument127 pagesCore Java Materialrohith b ,mNo ratings yet
- Question Bank: Subject Name: Artificial Intelligence & Machine Learning Subject Code: 18CS71 Sem: VIIDocument8 pagesQuestion Bank: Subject Name: Artificial Intelligence & Machine Learning Subject Code: 18CS71 Sem: VIIDileep Kn100% (1)
- Unit 1-5 CS8079 HCI QBank Panimalar College PDFDocument49 pagesUnit 1-5 CS8079 HCI QBank Panimalar College PDFHafiz RahmanNo ratings yet
- CP5191 Machine Learning Techniques L T P C3 0 0 3Document7 pagesCP5191 Machine Learning Techniques L T P C3 0 0 3indumathythanik933No ratings yet
- Learning ParadigmsDocument41 pagesLearning ParadigmsuzmaNo ratings yet
- Machine Learning Logistic Regression ClassifiersDocument389 pagesMachine Learning Logistic Regression Classifiersshruti katareNo ratings yet
- Data Science NewDocument9 pagesData Science NewKrishna mENo ratings yet
- Intelligent Video Surveillance System for Suspect Detection Using OpenCVDocument4 pagesIntelligent Video Surveillance System for Suspect Detection Using OpenCVPrasanna0% (1)
- Artificial IntelligenceDocument2 pagesArtificial IntelligenceAbhi AndhariyaNo ratings yet
- Enabling Technologies and Federated CloudDocument38 pagesEnabling Technologies and Federated Cloudasd100% (1)
- Machine Learning Algorithms - Summary + R CodeDocument34 pagesMachine Learning Algorithms - Summary + R Codeamiba45No ratings yet
- AI QuestionBank PartA&PartB RejinpaulDocument111 pagesAI QuestionBank PartA&PartB RejinpaulEdappadi k. PalaniswamiNo ratings yet
- Machine Learning IntroductionDocument3 pagesMachine Learning Introduction19- 5b7No ratings yet
- Machine LearningDocument128 pagesMachine LearningRamakrishna ChintalaNo ratings yet
- C&ns Midi 3sets 22-23-19bqDocument2 pagesC&ns Midi 3sets 22-23-19bqafreed khanNo ratings yet
- MC Ass1Document10 pagesMC Ass1afreed khanNo ratings yet
- Bda Pdf1 Bda Pdf2 MergedDocument16 pagesBda Pdf1 Bda Pdf2 Mergedafreed khanNo ratings yet
- ML Unit-2 Material Add-OnDocument82 pagesML Unit-2 Material Add-Onafreed khanNo ratings yet
- C&NS Unit-1 R16Document44 pagesC&NS Unit-1 R16afreed khanNo ratings yet
- ML Unit-3-1 Material WORDDocument16 pagesML Unit-3-1 Material WORDafreed khanNo ratings yet
- Photo ResumeDocument2 pagesPhoto Resumeafreed khanNo ratings yet
- Machine Learning Decision Tree ID3 AlgorithmDocument25 pagesMachine Learning Decision Tree ID3 Algorithmafreed khanNo ratings yet
- Java by EntiretyDocument1 pageJava by Entiretyafreed khanNo ratings yet
- BDA Answers-1Document15 pagesBDA Answers-1afreed khanNo ratings yet
- GB Assignment QuestionsDocument1 pageGB Assignment Questionsafreed khanNo ratings yet
- Employee ResearchDocument27 pagesEmployee Researchafreed khanNo ratings yet
- Renewable Energy Sources for Green BuildingsDocument16 pagesRenewable Energy Sources for Green Buildingsafreed khanNo ratings yet
- Unit 1Document47 pagesUnit 1afreed khanNo ratings yet
- 4-1 Bda Tutorial QuestionsDocument1 page4-1 Bda Tutorial Questionsafreed khanNo ratings yet
- 4th YearDocument105 pages4th Yearafreed khanNo ratings yet
- Week 2 ScienceDocument5 pagesWeek 2 ScienceDonaNo ratings yet
- Learner's Material: ScienceDocument18 pagesLearner's Material: ScienceRubina Fallorina OzoNo ratings yet
- Calculus Cram Packet PDFDocument140 pagesCalculus Cram Packet PDFCedric Zhou100% (2)
- Gamma IndexDocument12 pagesGamma IndexMayuri NathNo ratings yet
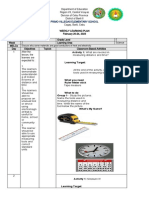
- Weekly Home Schooling PlanDocument3 pagesWeekly Home Schooling PlanKisha Jane JasminNo ratings yet
- Connectivity 1Document11 pagesConnectivity 1Suresh SuryaNo ratings yet
- Class 5 Chapter 1 Maps and GlobesDocument7 pagesClass 5 Chapter 1 Maps and GlobesChitra JoshiNo ratings yet
- Module 2 - Plane Coordinate GeometryDocument27 pagesModule 2 - Plane Coordinate GeometryGhea SapadNo ratings yet
- Automatic Steering Systems Based On Relative PositionDocument7 pagesAutomatic Steering Systems Based On Relative PositionerpublicationNo ratings yet
- Objectives For Tutorial On Inverse Square Law (ISL)Document9 pagesObjectives For Tutorial On Inverse Square Law (ISL)Kalaivel ThandavarayanNo ratings yet
- Understanding and Using LinestringsDocument35 pagesUnderstanding and Using LinestringsRodrigo RodriguezNo ratings yet
- Motion in One DimensionDocument43 pagesMotion in One DimensionMundu Mustafa100% (1)
- Physics Student Textbook Grade 7Document182 pagesPhysics Student Textbook Grade 7yishak haile67% (6)
- Leica DISTO™ X310: How To UseDocument7 pagesLeica DISTO™ X310: How To UseadenanNo ratings yet
- Mahematics March 27, 2023Document13 pagesMahematics March 27, 2023LUISA LATOGNo ratings yet
- 3RD Monthly ExamDocument11 pages3RD Monthly ExamALVEN OYANGORINNo ratings yet
- View AutoForm Simulation ResultsDocument42 pagesView AutoForm Simulation ResultstuấnNo ratings yet
- Sc5-q3-Module-2 - Measuring Tools and Correct Standard Units - v2Document19 pagesSc5-q3-Module-2 - Measuring Tools and Correct Standard Units - v2Vegilla Sinlao Ann Jeeh100% (1)
- How Fast and Which Way?: Friday 13 October MR PatelDocument20 pagesHow Fast and Which Way?: Friday 13 October MR PatelBenjamin WatsonNo ratings yet
- I4-Road Part 2-Geometry C PDFDocument70 pagesI4-Road Part 2-Geometry C PDFRA VuthaNo ratings yet
- Ipc Describing Motion Verbally With Distance and Displacement Study NotesDocument20 pagesIpc Describing Motion Verbally With Distance and Displacement Study NotesGrantNo ratings yet
- Linear MotionDocument33 pagesLinear MotionNicholas100% (1)
- Questions Answers On Vector Analysis and ApplicationsDocument8 pagesQuestions Answers On Vector Analysis and ApplicationsAbduŕ RehmanNo ratings yet
- Euclidean GeometryDocument405 pagesEuclidean Geometryec gk100% (30)
- K Value & Design SpeedsDocument7 pagesK Value & Design SpeedsBeljun FloresNo ratings yet
- Grade 5 PPT Science Q3 W2 Day 1-5Document85 pagesGrade 5 PPT Science Q3 W2 Day 1-5FarahJaneBonusNo ratings yet
- STEM - GP12EU Ia 12 14Document2 pagesSTEM - GP12EU Ia 12 14Glenda Astodillo100% (1)
- Distance and Displacement LabDocument2 pagesDistance and Displacement LabAllysa Dela Justa Talento0% (1)
- Radius Diameter 1Document2 pagesRadius Diameter 1Tanya KapurNo ratings yet
- Station 9 Nelson Drop TestDocument2 pagesStation 9 Nelson Drop TestVeda Leigh SyNo ratings yet