You might also like
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- FMCW ThesisDocument9 pagesFMCW Thesisirywesief100% (2)
- Comparaison AlgosDocument5 pagesComparaison AlgosLamiae SqualiNo ratings yet
- Improved Target Detection Through DNN-Based Multi-Channel Interference Mitigation in Automotive RadarDocument15 pagesImproved Target Detection Through DNN-Based Multi-Channel Interference Mitigation in Automotive Radarwho3No ratings yet
- CAD Based Implementation of RADAR Using Direct Sequence Spread Spectrum TechniqueDocument5 pagesCAD Based Implementation of RADAR Using Direct Sequence Spread Spectrum TechniqueInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- IJE Volume 36 Issue 9 Pages 1589-1596 4Document8 pagesIJE Volume 36 Issue 9 Pages 1589-1596 4EXAM SECTIONNo ratings yet
- Full Waveform Analysis For Long Range 3D Imaging Laser RadarDocument12 pagesFull Waveform Analysis For Long Range 3D Imaging Laser RadarmcgagliardiNo ratings yet
- Research Article: SDR Based Energy Detection Spectrum Sensing in Cognitive Radio For Real Time Video TransmissionDocument11 pagesResearch Article: SDR Based Energy Detection Spectrum Sensing in Cognitive Radio For Real Time Video Transmissionmagaly morenoNo ratings yet
- IJCT V5 I4 Paper 1 1009-1014Document7 pagesIJCT V5 I4 Paper 1 1009-1014Mohamed BaadecheNo ratings yet
- Dual-Tree Complex Wavelet Transform Based SAR Despeckling Using Interscale DependenceDocument9 pagesDual-Tree Complex Wavelet Transform Based SAR Despeckling Using Interscale DependenceNavdeep GoelNo ratings yet
- Unscented Kalman Filter Based On Spectrum Sensing in A Cognitive Radio Network Using An Adaptive Fuzzy SystemDocument19 pagesUnscented Kalman Filter Based On Spectrum Sensing in A Cognitive Radio Network Using An Adaptive Fuzzy SystemakttripathiNo ratings yet
- Spectrum Crowding and Cognitive Radar: Dr. Michael WicksDocument6 pagesSpectrum Crowding and Cognitive Radar: Dr. Michael WicksastefanovichNo ratings yet
- Progress in Electromagnetics Research C, Vol. 11, 213-228, 2009Document16 pagesProgress in Electromagnetics Research C, Vol. 11, 213-228, 2009Karloz CondeNo ratings yet
- 06-The Study of CFAR - Constant False Alarm Rate - Process FoDocument6 pages06-The Study of CFAR - Constant False Alarm Rate - Process FofaizazohraNo ratings yet
- Sparse Parameter Estimation and Imaging in Mmwave MIMO Radar Systems With Multiple Stationary and Mobile TargetsDocument17 pagesSparse Parameter Estimation and Imaging in Mmwave MIMO Radar Systems With Multiple Stationary and Mobile TargetsVanidevi ManiNo ratings yet
- Adaptive Thresholding in Marine Radars: M. Alaee, M. Firoozmand, R. Amiri and M. SepahvandDocument7 pagesAdaptive Thresholding in Marine Radars: M. Alaee, M. Firoozmand, R. Amiri and M. SepahvandHrishikesh TiwaryNo ratings yet
- Optica-Dual-Comb SpectrosDocument13 pagesOptica-Dual-Comb SpectrosYe FengNo ratings yet
- Real Time Radar ImagingDocument11 pagesReal Time Radar ImagingSatya PattanayakNo ratings yet
- IJETR2187Document5 pagesIJETR2187anil kasotNo ratings yet
- 39 - Ground Clutter Removal in GPR SurveysDocument7 pages39 - Ground Clutter Removal in GPR Surveysعبدالباسط البشةNo ratings yet
- Spectrum Sensing in Cognitive Radio Networks: Threshold Optimization and AnalysisDocument19 pagesSpectrum Sensing in Cognitive Radio Networks: Threshold Optimization and AnalysisutkarshNo ratings yet
- Implementation of Radar Transmitter-Receiver UsingDocument8 pagesImplementation of Radar Transmitter-Receiver UsingFurkan KahramanNo ratings yet
- Remotesensing 14 05416Document30 pagesRemotesensing 14 05416fakeNo ratings yet
- IET Communications - 2023 - Godugu - Performance Evaluation of Hard Decision and Soft Data Aided Cooperative SpectrumDocument22 pagesIET Communications - 2023 - Godugu - Performance Evaluation of Hard Decision and Soft Data Aided Cooperative SpectrumDr. M. Ranjeeth ECENo ratings yet
- Low Cost Ultra Wide Band Hybrid Radar Design Using Virtual Reference Tags As Road Safety Feature in VehiclesDocument10 pagesLow Cost Ultra Wide Band Hybrid Radar Design Using Virtual Reference Tags As Road Safety Feature in VehiclesJournalofICT100% (1)
- Accuracy and Error Assessment of Terrestrial, Mobile and Airborne LidarDocument10 pagesAccuracy and Error Assessment of Terrestrial, Mobile and Airborne LidarThomas EnglishNo ratings yet
- High Uncertainty Aware Localization and Error Optimization of Mobile Nodes For Wireless Sensor NetworksDocument11 pagesHigh Uncertainty Aware Localization and Error Optimization of Mobile Nodes For Wireless Sensor NetworksIAES IJAINo ratings yet
- FSO Link in Haze and Fog WeatherDocument8 pagesFSO Link in Haze and Fog WeatherHANZ V2No ratings yet
- Paper 2Document11 pagesPaper 2QAQ WNo ratings yet
- Target Classification in Forward Scattering Radar in Noisy EnvironmentDocument5 pagesTarget Classification in Forward Scattering Radar in Noisy EnvironmentInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Spectrum Sensing Measurement Using GNU Radio and USRP Software Radio PlatformDocument6 pagesSpectrum Sensing Measurement Using GNU Radio and USRP Software Radio PlatformCharly BskzNo ratings yet
- Ship Detection Based On Morphological Component Analysis of High-Frequency Surface Wave Radar ImagesDocument9 pagesShip Detection Based On Morphological Component Analysis of High-Frequency Surface Wave Radar ImagesRaghul RamasamyNo ratings yet
- Paper of Sensing in EngDocument11 pagesPaper of Sensing in EngtrephenaNo ratings yet
- IET Radar Sonar Navi - 2023 - Kannanthara - Whole System Radar Modelling Simulation and ValidationDocument11 pagesIET Radar Sonar Navi - 2023 - Kannanthara - Whole System Radar Modelling Simulation and ValidationRafik Et-TrabelsiNo ratings yet
- Data Fusion TechniqueDocument8 pagesData Fusion TechniquepuppyrNo ratings yet
- TV 20191219200623Document8 pagesTV 20191219200623Saif_Adnan11No ratings yet
- Cooperative Spectrum Sensing Deployment For Cognitive Radio Networks For Internet of Things 5G WirelesDocument23 pagesCooperative Spectrum Sensing Deployment For Cognitive Radio Networks For Internet of Things 5G Wirelesbvkarthik2711No ratings yet
- Signal ProcessingDocument13 pagesSignal ProcessingsanjayNo ratings yet
- Fusion of Cooperative Localization Data With DynamDocument7 pagesFusion of Cooperative Localization Data With DynamAlexander RiosNo ratings yet
- Performance of Fso Links Using Various Modulation Techniques and Cloud EffectDocument6 pagesPerformance of Fso Links Using Various Modulation Techniques and Cloud EffectJabeena AfthabNo ratings yet
- Chen 2019Document14 pagesChen 2019عصام الرماديNo ratings yet
- PAPER 45-A Literature Survey of Methods Used For The Analysis of MST Radar DataDocument7 pagesPAPER 45-A Literature Survey of Methods Used For The Analysis of MST Radar DataVirupakshi MadhurimaNo ratings yet
- Modulacao 3Document20 pagesModulacao 3Antonio Carlos Benecase JuniorNo ratings yet
- Imaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueDocument7 pagesImaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueAsd DsaNo ratings yet
- Cyclostationary Detection For Ofdm in Cognitive Radio SystemsDocument113 pagesCyclostationary Detection For Ofdm in Cognitive Radio SystemsIlhem BlelNo ratings yet
- Jeas 1023 9321Document10 pagesJeas 1023 9321vempalle rafiNo ratings yet
- SDSFLF: Fault Localization Framework For Optical Communication Using Software Digital Switching NetworkDocument12 pagesSDSFLF: Fault Localization Framework For Optical Communication Using Software Digital Switching NetworkIJRES teamNo ratings yet
- Ranging in Multiband Ultrawideband Communication SystemsDocument8 pagesRanging in Multiband Ultrawideband Communication SystemsRAJKUMAR SAMIKKANNUNo ratings yet
- Research Article: Signal Classification in Fading Channels Using Cyclic Spectral AnalysisDocument14 pagesResearch Article: Signal Classification in Fading Channels Using Cyclic Spectral AnalysisKamal GargNo ratings yet
- Cyclostationarity-Based Decision Reporting Scheme For Cooperative Spectrum SensingDocument14 pagesCyclostationarity-Based Decision Reporting Scheme For Cooperative Spectrum Sensingsuchi87No ratings yet
- TMPDDFB TMPDocument8 pagesTMPDDFB TMPFrontiersNo ratings yet
- Constant False Alarm Rate Detection of Radar Signals With Artificial Neural Networks by Mirko KückDocument69 pagesConstant False Alarm Rate Detection of Radar Signals With Artificial Neural Networks by Mirko Kückgong688665No ratings yet
- SPIE 2014 Online Waveform Processing For Demanding Target SituationsDocument10 pagesSPIE 2014 Online Waveform Processing For Demanding Target Situations李旭No ratings yet
- Chaos IssuesDocument9 pagesChaos IssuesFarhan FarhanNo ratings yet
- A Nobel Approach For Entropy Reduction of Wireless Sensor NetworksDocument5 pagesA Nobel Approach For Entropy Reduction of Wireless Sensor NetworksEditor IJRITCCNo ratings yet
- Distributed Spectrum Detection Algorithms For Cognitive RadioDocument5 pagesDistributed Spectrum Detection Algorithms For Cognitive RadioSangamithirai KrishnamoorthyNo ratings yet
- Performance Analysis of Space Time Block Codes For Free-Space Optical ChannelsDocument5 pagesPerformance Analysis of Space Time Block Codes For Free-Space Optical ChannelsInternational Journal of Scientific Research in Science, Engineering and Technology ( IJSRSET )No ratings yet
- FMCW Radar ThesisDocument6 pagesFMCW Radar Thesisjanaclarkbillings100% (2)
- Implementation of Direct Sequence Spread E2aa21adDocument9 pagesImplementation of Direct Sequence Spread E2aa21adasrawi asparNo ratings yet
- Group Based Multi-Channel Synchronized Spectrum Sensing in Cognitive Radio Network With 5GDocument13 pagesGroup Based Multi-Channel Synchronized Spectrum Sensing in Cognitive Radio Network With 5GRaagurGiriPrasadNo ratings yet
- Design, Simulation, and Analysis of Microstrip Patch Antenna For Wireless Applications Operating at 3.6 GHZDocument11 pagesDesign, Simulation, and Analysis of Microstrip Patch Antenna For Wireless Applications Operating at 3.6 GHZTELKOMNIKANo ratings yet
- Adaptive Segmentation Algorithm Based On Level Set Model in Medical ImagingDocument9 pagesAdaptive Segmentation Algorithm Based On Level Set Model in Medical ImagingTELKOMNIKANo ratings yet
- Deep Learning Approach To DDoS Attack With Imbalanced Data at The Application LayerDocument8 pagesDeep Learning Approach To DDoS Attack With Imbalanced Data at The Application LayerTELKOMNIKANo ratings yet
- Reagentless Iron Detection in Water Based On Unclad Fiber Optical SensorDocument9 pagesReagentless Iron Detection in Water Based On Unclad Fiber Optical SensorTELKOMNIKANo ratings yet
- A Progressive Learning For Structural Tolerance Online Sequential Extreme Learning MachineDocument12 pagesA Progressive Learning For Structural Tolerance Online Sequential Extreme Learning MachineTELKOMNIKANo ratings yet
- Implementation of FinFET Technology Based Low Power 4×4 Wallace Tree Multiplier Using Hybrid Full AdderDocument8 pagesImplementation of FinFET Technology Based Low Power 4×4 Wallace Tree Multiplier Using Hybrid Full AdderTELKOMNIKANo ratings yet
- Improving The Detection of Intrusion in Vehicular Ad-Hoc Networks With Modified Identity-Based CryptosystemDocument8 pagesImproving The Detection of Intrusion in Vehicular Ad-Hoc Networks With Modified Identity-Based CryptosystemTELKOMNIKANo ratings yet
- Intrusion Detection System For Imbalance Ratio Class Using Weighted XGBoost ClassifierDocument11 pagesIntrusion Detection System For Imbalance Ratio Class Using Weighted XGBoost ClassifierTELKOMNIKANo ratings yet
- A Novel Compact Dual-Band Bandstop Filter With Enhanced Rejection BandsDocument7 pagesA Novel Compact Dual-Band Bandstop Filter With Enhanced Rejection BandsTELKOMNIKANo ratings yet
- Fault-Tolerant Backup Storage System For Confidential Data in Distributed ServersDocument9 pagesFault-Tolerant Backup Storage System For Confidential Data in Distributed ServersTELKOMNIKANo ratings yet
- Contrast Modification For Pre-Enhancement Process in Multi-Contrast Rubeosis Iridis ImagesDocument12 pagesContrast Modification For Pre-Enhancement Process in Multi-Contrast Rubeosis Iridis ImagesTELKOMNIKANo ratings yet
- Comparative Simulation Study of Electric Motors For High Performance of 3D PrintersDocument14 pagesComparative Simulation Study of Electric Motors For High Performance of 3D PrintersTELKOMNIKANo ratings yet
- An Automatic Flame Detection System For Outdoor AreasDocument8 pagesAn Automatic Flame Detection System For Outdoor AreasTELKOMNIKANo ratings yet
- Power Consumption and Energy Management For Edge Computing: State of The ArtDocument10 pagesPower Consumption and Energy Management For Edge Computing: State of The ArtTELKOMNIKANo ratings yet
- Conceptual Model of Internet Banking Adoption With Perceived Risk and Trust FactorsDocument7 pagesConceptual Model of Internet Banking Adoption With Perceived Risk and Trust FactorsTELKOMNIKANo ratings yet
- Design and Performance Analysis of Low Phase Noise LC-voltage Controlled OscillatorDocument9 pagesDesign and Performance Analysis of Low Phase Noise LC-voltage Controlled OscillatorTELKOMNIKANo ratings yet
- Low-Cost Central Monitor Based Personal Computer With Electrocardiogram and Heart Rate Parameters Via Wireless XBee ProDocument10 pagesLow-Cost Central Monitor Based Personal Computer With Electrocardiogram and Heart Rate Parameters Via Wireless XBee ProTELKOMNIKANo ratings yet
- Core Model of Information Technology Governance System Design in Local GovernmentDocument12 pagesCore Model of Information Technology Governance System Design in Local GovernmentTELKOMNIKANo ratings yet
- Biomedical-Named Entity Recognition Using CUDA Accelerated KNN AlgorithmDocument11 pagesBiomedical-Named Entity Recognition Using CUDA Accelerated KNN AlgorithmTELKOMNIKANo ratings yet
- Dickson Voltage Multiplier With 1 To 6 Stages For Dual-Band Rectifiers (2.45/5.8 GHZ) With Low Input PowerDocument8 pagesDickson Voltage Multiplier With 1 To 6 Stages For Dual-Band Rectifiers (2.45/5.8 GHZ) With Low Input PowerTELKOMNIKANo ratings yet
- Traffic Flow Measurement For Smart Traffic Light System DesignDocument6 pagesTraffic Flow Measurement For Smart Traffic Light System DesignTELKOMNIKANo ratings yet
- Experimental of Vectorizer and Classifier For Scrapped Social Media DataDocument10 pagesExperimental of Vectorizer and Classifier For Scrapped Social Media DataTELKOMNIKANo ratings yet
- Lightweight Digital Imaging and Communications in Medicine Image Encryption For Iot SystemDocument13 pagesLightweight Digital Imaging and Communications in Medicine Image Encryption For Iot SystemTELKOMNIKANo ratings yet
- One To Many (New Scheme For Symmetric Cryptography)Document9 pagesOne To Many (New Scheme For Symmetric Cryptography)TELKOMNIKANo ratings yet
- Performance Improvements of A VLC System, in A V2X Context, Using A Different Multiplexing TechniqueDocument11 pagesPerformance Improvements of A VLC System, in A V2X Context, Using A Different Multiplexing TechniqueTELKOMNIKANo ratings yet
- A Combined Fuzzy AHP With Fuzzy TOPSIS To Locate Industrial Supporting Bonded Logistics CentersDocument8 pagesA Combined Fuzzy AHP With Fuzzy TOPSIS To Locate Industrial Supporting Bonded Logistics CentersTELKOMNIKANo ratings yet
- Driving Cycle Tracking Device Development and Analysis On Route-To-Work For Kuala Terengganu CityDocument7 pagesDriving Cycle Tracking Device Development and Analysis On Route-To-Work For Kuala Terengganu CityTELKOMNIKANo ratings yet
- Customer Segmentation With RFM Models and Demographic Variable Using DBSCAN AlgorithmDocument8 pagesCustomer Segmentation With RFM Models and Demographic Variable Using DBSCAN AlgorithmTELKOMNIKANo ratings yet
- Using Phosphor ZnB2O4:Mn2+ For Enhancing The Illuminating Beam and Hue Standard in White Light-Emitting DiodesDocument8 pagesUsing Phosphor ZnB2O4:Mn2+ For Enhancing The Illuminating Beam and Hue Standard in White Light-Emitting DiodesTELKOMNIKANo ratings yet
- A Real-Time Hypertext Transfer Protocol Intrusion Detection System On Web ServerDocument8 pagesA Real-Time Hypertext Transfer Protocol Intrusion Detection System On Web ServerTELKOMNIKANo ratings yet
- Queues: CS 308 - Data StructuresDocument28 pagesQueues: CS 308 - Data Structuresagoyal5145No ratings yet
- Lectures On Artificial Intelligence 12.09.14Document97 pagesLectures On Artificial Intelligence 12.09.14Jeet PatelNo ratings yet
- Annual Report 2020 PDFDocument165 pagesAnnual Report 2020 PDFNRNo ratings yet
- The Amazon Logo, Its Meaning and The History Behind ItDocument11 pagesThe Amazon Logo, Its Meaning and The History Behind ItVăn Nghi NguyễnNo ratings yet
- A330 AMM ch06Document170 pagesA330 AMM ch06Larry BoguesNo ratings yet
- NCSC Glossary: The NCSC Glossary - A Set of Straightforward Definitions For Common Cyber Security TermsDocument10 pagesNCSC Glossary: The NCSC Glossary - A Set of Straightforward Definitions For Common Cyber Security TermsA.Suhasini naiduNo ratings yet
- MCAEthical HackingreportDocument10 pagesMCAEthical HackingreportMEHUL PATELNo ratings yet
- DJJ30113 LAB SHEET LAB 3 Vickers Hardness TestDocument6 pagesDJJ30113 LAB SHEET LAB 3 Vickers Hardness TestArif DanialNo ratings yet
- Final Report of Andode Tuma Power and TelecommunicationDocument38 pagesFinal Report of Andode Tuma Power and TelecommunicationSintayehu TerefeNo ratings yet
- SS 15A03601 Operations ResearchDocument2 pagesSS 15A03601 Operations ResearchRaj KumarNo ratings yet
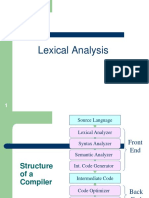
- Lexical AnalysisDocument38 pagesLexical Analysissaeed khanNo ratings yet
- STUCOR - Online Examination - Student ManualDocument18 pagesSTUCOR - Online Examination - Student ManualPanthalaraja JagaaNo ratings yet
- Test Bank For Purchasing and Supply Management 14th Edition P Fraser JohnsonDocument6 pagesTest Bank For Purchasing and Supply Management 14th Edition P Fraser JohnsontostoillyoqiNo ratings yet
- Future of Robotics Agriculture 1Document36 pagesFuture of Robotics Agriculture 1Asma RafiqNo ratings yet
- Muhammad Sajjad CV Dubai FormatDocument3 pagesMuhammad Sajjad CV Dubai FormatMuhammad Shahram KhalidNo ratings yet
- LB Aw ns12 Man - enDocument52 pagesLB Aw ns12 Man - enWaldir Donatti JuniorNo ratings yet
- EGA Pipa ConduitDocument2 pagesEGA Pipa ConduitDerahamaniNo ratings yet
- Technological Forecasting & Social Change: Scott G. DackoDocument14 pagesTechnological Forecasting & Social Change: Scott G. DackoLeiliNo ratings yet
- 3D Blu-Ray / DVD Home Theater System: Service ManualDocument109 pages3D Blu-Ray / DVD Home Theater System: Service Manualferdy srgh100% (1)
- Dell Emc NX Windows Nas Series Configuration Guide: The Best of Both WorldsDocument6 pagesDell Emc NX Windows Nas Series Configuration Guide: The Best of Both WorldsdanielNo ratings yet
- Juniper Networks - (Archive) Oracle - PeopleSoft Doesn't Work After Upgrade Through DXDocument1 pageJuniper Networks - (Archive) Oracle - PeopleSoft Doesn't Work After Upgrade Through DXManoj Kumar PradhanNo ratings yet
- Chapter-10 Parallel Programming Models, Languages and CompilersDocument5 pagesChapter-10 Parallel Programming Models, Languages and Compilersshamsiya saNo ratings yet
- Messages: Preply Stands With Ukraine and Its PeopleDocument4 pagesMessages: Preply Stands With Ukraine and Its Peopleniezhe152No ratings yet
- Gabriel 2020Document2 pagesGabriel 2020robin rajanNo ratings yet
- Business Certificate Timetable August 2023 Draft Edited 1 1pdf 1686898228811Document3 pagesBusiness Certificate Timetable August 2023 Draft Edited 1 1pdf 1686898228811Sada DahonestNo ratings yet
- Umax 2100xl User ManualDocument26 pagesUmax 2100xl User ManualdedyNo ratings yet
- Commissioning, Maintenance, TroubleshootingDocument154 pagesCommissioning, Maintenance, TroubleshootingehsanrastayeshNo ratings yet
- Rainwater Harvesting: Model-Based Design EvaluationDocument12 pagesRainwater Harvesting: Model-Based Design EvaluationOliver AbordoNo ratings yet
- DeltaV SISnet Distance Extenders (2011)Document8 pagesDeltaV SISnet Distance Extenders (2011)mahshid klNo ratings yet
- EO Gaddis Java Chapter 06 6e-ClassesObjectsPart2Document48 pagesEO Gaddis Java Chapter 06 6e-ClassesObjectsPart2nyle90009No ratings yet