You might also like
- Ramkumar Gandhinathan, Lentin Joseph - ROS Robotics Projects - Build and Control Robots Powered by The Robot Operating System, Machine Learning, and Virtual Reality (2019, Packt Publishing) PDFDocument449 pagesRamkumar Gandhinathan, Lentin Joseph - ROS Robotics Projects - Build and Control Robots Powered by The Robot Operating System, Machine Learning, and Virtual Reality (2019, Packt Publishing) PDFAyman Damoun100% (1)
- E-Commerce Website: Final Year Project Short ProposalDocument2 pagesE-Commerce Website: Final Year Project Short ProposalMobassar Khan100% (2)
- FIL0814 DavaoDocument27 pagesFIL0814 DavaoangelomercedeblogNo ratings yet
- Lab Manual CGDocument24 pagesLab Manual CGDrishti GuptaNo ratings yet
- CG ASsignmentDocument20 pagesCG ASsignmentGoyal AdityaNo ratings yet
- Computer Graphics LAB ECS-554: Rampur Road MoradabadDocument19 pagesComputer Graphics LAB ECS-554: Rampur Road MoradabadVikalp Shri BachchanNo ratings yet
- 19BCM032 - CG RecordDocument27 pages19BCM032 - CG Recordmathew roshanNo ratings yet
- Worksheet 3.1Document20 pagesWorksheet 3.1Vatsal SharmaNo ratings yet
- CG Practical AyushDocument23 pagesCG Practical AyushAyush SrivastavaNo ratings yet
- Practical No 10:-Clipping Algorithms. 1) Point Clipping AlgorithmDocument14 pagesPractical No 10:-Clipping Algorithms. 1) Point Clipping Algorithmкʜaɴ S aʟaмNo ratings yet
- Computer Graphics Lab Manual For CSE Sixth SemesterDocument15 pagesComputer Graphics Lab Manual For CSE Sixth SemesterPrabhu EaswarNo ratings yet
- Program To Draw A Teddy Bear: OutputDocument31 pagesProgram To Draw A Teddy Bear: OutputVinit KumarNo ratings yet
- CG 3rd PGMDocument4 pagesCG 3rd PGMHema JilladakuntaNo ratings yet
- CG Assignment 2Document4 pagesCG Assignment 2minnasahi7No ratings yet
- CG Assignment 5 Meenu Maria Giby U18CO106: CodeDocument14 pagesCG Assignment 5 Meenu Maria Giby U18CO106: Codemeenu gibyNo ratings yet
- NLNDocument2 pagesNLNIMMANUEL RUSSO (RA2111051010032)No ratings yet
- Computer Graphics Group Assignment 2Document21 pagesComputer Graphics Group Assignment 2klli234adNo ratings yet
- Exp11 CG 245Document2 pagesExp11 CG 245VAIBHAVI WELIS192123No ratings yet
- College of TechnologyDocument18 pagesCollege of TechnologyShubham BansalNo ratings yet
- M.sc. Computer Science - Software EngineeringDocument32 pagesM.sc. Computer Science - Software EngineeringHeenaNo ratings yet
- CG Labset ProgramsDocument11 pagesCG Labset ProgramsVARSHA K UNo ratings yet
- CG Project FileDocument25 pagesCG Project Fileashish2701No ratings yet
- Pract 7-9Document19 pagesPract 7-9White RockNo ratings yet
- Computer Graphics Practical File Sem-VI DUDocument28 pagesComputer Graphics Practical File Sem-VI DUGauri BhardwajNo ratings yet
- PRO5Document3 pagesPRO5sakshi sNo ratings yet
- Practical No.1: Aim: Write A Program For 2D Line Drawing As Raster Graphics Display. CodeDocument41 pagesPractical No.1: Aim: Write A Program For 2D Line Drawing As Raster Graphics Display. CodeAshish SharmaNo ratings yet
- CG LabDocument52 pagesCG LabANMOL CHAUHANNo ratings yet
- GD Graphics Driver (Detects Best Graphics Driver and Assigns It As Default, GM Graphics ModeDocument11 pagesGD Graphics Driver (Detects Best Graphics Driver and Assigns It As Default, GM Graphics ModeSamiksha BargudeNo ratings yet
- V Jha CG Back UpDocument53 pagesV Jha CG Back UpMimansha SharmaNo ratings yet
- Computer Graphic CC ProgramsDocument47 pagesComputer Graphic CC ProgramsJarun DevNo ratings yet
- 203 Computer GraphicsDocument36 pages203 Computer GraphicsAbdur Rehman Abdur RehmanNo ratings yet
- Assignment 2 NAME-Rutik Kishor Rokade Roll No - 205B060: ProgramDocument4 pagesAssignment 2 NAME-Rutik Kishor Rokade Roll No - 205B060: Program390 RUTIK ROKADENo ratings yet
- Computer Graphics ProgramDocument28 pagesComputer Graphics ProgramMadhukar SinghNo ratings yet
- Program For Polygon Clipping Using Sutherland-Hodgeman AlgorithmDocument7 pagesProgram For Polygon Clipping Using Sutherland-Hodgeman Algorithmsukaran123No ratings yet
- 5Document3 pages5Nithin SSNo ratings yet
- ProgramsDocument27 pagesProgramsUday TheteNo ratings yet
- 02 1 Cohen Sutherland PDFDocument3 pages02 1 Cohen Sutherland PDFSarra AnitaNo ratings yet
- Computer Graphics LabDocument43 pagesComputer Graphics LabMD Mehraj HossainNo ratings yet
- GraphicsDocument11 pagesGraphicsManish SagarNo ratings yet
- Bresenhams Line Generation Algorithm: FunctionDocument8 pagesBresenhams Line Generation Algorithm: FunctionDESI COMICSNo ratings yet
- Worksheet 1.4Document4 pagesWorksheet 1.4Rohit RohillaNo ratings yet
- #Include #Include #Include Int Round (Float) Void MainDocument2 pages#Include #Include #Include Int Round (Float) Void Mainabhishek6c1109No ratings yet
- EX. NO. 1 Bresenhams Algorithms For Line, Circle, Ellipse: k+1 K k+1 KDocument68 pagesEX. NO. 1 Bresenhams Algorithms For Line, Circle, Ellipse: k+1 K k+1 KAkila NarayananNo ratings yet
- Program To Draw A Line Using Dda AlgorithmDocument50 pagesProgram To Draw A Line Using Dda AlgorithmvarunsmithNo ratings yet
- Fundamental Graphics FunctionsDocument17 pagesFundamental Graphics Functionsశ్రీనివాస బాబ్జి జోస్యులNo ratings yet
- WAP To Draw A Line Using DDA AlgorithmDocument35 pagesWAP To Draw A Line Using DDA AlgorithmMayank TalwarNo ratings yet
- My 2D Final ReportDocument25 pagesMy 2D Final Reportالاء امامNo ratings yet
- CGR 2Document5 pagesCGR 2omkarNo ratings yet
- CGA PracDocument30 pagesCGA Pracomkar13102004No ratings yet
- Practical-1: Aim:-Write A Program To Implement DDA Line Drawing Algorithm. AlgorithmDocument37 pagesPractical-1: Aim:-Write A Program To Implement DDA Line Drawing Algorithm. AlgorithmDrishti GuptaNo ratings yet
- CG FileDocument45 pagesCG FileAkshat kumarNo ratings yet
- Computer Graphics File 2Document22 pagesComputer Graphics File 2Vanshita RajputNo ratings yet
- Computer Graphics Lab File: IndexDocument83 pagesComputer Graphics Lab File: IndexPuja MishraNo ratings yet
- Comp Graph LabDocument9 pagesComp Graph LabSuraj GuptaNo ratings yet
- Abrar CGDocument14 pagesAbrar CG[04] - Abrar ShahNo ratings yet
- Computer Graphics Lab ProgramsDocument26 pagesComputer Graphics Lab ProgramsRahul HellsanxelNo ratings yet
- Computer Graphics CombinedDocument31 pagesComputer Graphics CombinedvermaNo ratings yet
- Lab Assignment 4Document5 pagesLab Assignment 4Kundan PatilNo ratings yet
- CG LabsDocument24 pagesCG LabsYatra NepalNo ratings yet
- GRAPHICS Lab ReportDocument70 pagesGRAPHICS Lab ReportFahad AhmadNo ratings yet
- GraphicsDocument11 pagesGraphicsChumki DasNo ratings yet
- Jakaria Resume-1Document1 pageJakaria Resume-1MD Mehraj HossainNo ratings yet
- Jakaria Resume-1Document1 pageJakaria Resume-1MD Mehraj HossainNo ratings yet
- Computer Graphics LabDocument43 pagesComputer Graphics LabMD Mehraj HossainNo ratings yet
- Code BookDocument19 pagesCode BookMD Mehraj HossainNo ratings yet
- Modern Ecommerce Moibile AppDocument37 pagesModern Ecommerce Moibile AppMD Mehraj Hossain100% (1)
- Mhs Cover PageDocument1 pageMhs Cover PageMD Mehraj HossainNo ratings yet
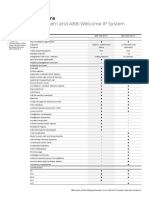
- ABB-Welcome System and ABB-Welcome IP System: Door Entry SystemsDocument1 pageABB-Welcome System and ABB-Welcome IP System: Door Entry SystemspeteatkoNo ratings yet
- PseudocodeDocument9 pagesPseudocodePallavi GuptaNo ratings yet
- Lab: JQL: 1: Create A Basic Search and View The JQL QueryDocument3 pagesLab: JQL: 1: Create A Basic Search and View The JQL QuerySergio BoteroNo ratings yet
- Lecture3-Web Design and DevelopmentDocument30 pagesLecture3-Web Design and DevelopmentakdeuefNo ratings yet
- Laptop Buyback Option - GaanaDocument2 pagesLaptop Buyback Option - GaanaasdsdsNo ratings yet
- BR100Document14 pagesBR100Sreekanth Reddy PothulaNo ratings yet
- SIC Action PlanDocument3 pagesSIC Action Plancarmina duldulaoNo ratings yet
- SAP S/4HANA 1909 FPS00 Fully-Activated Appliance: Print Form CustomizationDocument15 pagesSAP S/4HANA 1909 FPS00 Fully-Activated Appliance: Print Form CustomizationProSAP SA de CVNo ratings yet
- IPOCC9 1 7InstallationTaskBasedGuideIssue1 0Document503 pagesIPOCC9 1 7InstallationTaskBasedGuideIssue1 0Anonymous aWxvNpNo ratings yet
- EZ-Boom 1B GSG ENG PDFDocument42 pagesEZ-Boom 1B GSG ENG PDFJoao Pedro Barros e SouzaNo ratings yet
- Lect2 IOTDocument33 pagesLect2 IOTEng:Mostafa Morsy MohamedNo ratings yet
- Design Criteria: 7. Mobile Staff Duress SystemDocument2 pagesDesign Criteria: 7. Mobile Staff Duress SystemVinay PallivalppilNo ratings yet
- Nguyen Vo Thuan Thien (B2005893) : Part 1: Build The Linux Kernel (2.0 Points)Document8 pagesNguyen Vo Thuan Thien (B2005893) : Part 1: Build The Linux Kernel (2.0 Points)Thiên NguyễnNo ratings yet
- DsresumeDocument1 pageDsresumeapi-479960960No ratings yet
- AGENCY - APP - mPhilGEPS Training PresentationDocument24 pagesAGENCY - APP - mPhilGEPS Training PresentationRachel Abad-FabeNo ratings yet
- Sony Vegas Pro 10 Serial Number + Crack KeygenDocument5 pagesSony Vegas Pro 10 Serial Number + Crack KeygenAna MariaNo ratings yet
- Sinorix STD SiemensDocument6 pagesSinorix STD SiemensAlesianNo ratings yet
- QRadar SIEM 7.0 Data SheetDocument4 pagesQRadar SIEM 7.0 Data Sheetmehak_3274516No ratings yet
- Java Programming Tutorial OOP ExercisesDocument47 pagesJava Programming Tutorial OOP ExercisesLupu CiprianNo ratings yet
- SWEBOKv 3Document335 pagesSWEBOKv 3Vinicius MeirellesNo ratings yet
- Applied Machine Learning For Engineers: Introduction To NumpyDocument13 pagesApplied Machine Learning For Engineers: Introduction To NumpyGilbe TestaNo ratings yet
- 1st Year Sample ProjectDocument56 pages1st Year Sample ProjectshraddhaNo ratings yet
- A Survey of Android Application and Malware HardeningDocument24 pagesA Survey of Android Application and Malware HardeningAbhinandan BanikNo ratings yet
- Module - 1 Lecture Notes - 2 Optimization Problem and Model FormulationDocument5 pagesModule - 1 Lecture Notes - 2 Optimization Problem and Model Formulationraj ranjanNo ratings yet
- DeLorme Earthmate GPS PN20 ManualDocument93 pagesDeLorme Earthmate GPS PN20 ManualVictor FdezNo ratings yet
- MCQ Questions For Chapter 1 in Digital DesignDocument10 pagesMCQ Questions For Chapter 1 in Digital DesignRasha SamourNo ratings yet
- 3.6 Digitalized Oil and Gas FieldsDocument25 pages3.6 Digitalized Oil and Gas FieldsHamid Souliman100% (2)