You might also like
- NP-completeness (CH 34) : Optimization & Decision ProblemsDocument10 pagesNP-completeness (CH 34) : Optimization & Decision ProblemsRaghu SangarsNo ratings yet
- P, NP and NP-Complete ProblemsDocument20 pagesP, NP and NP-Complete ProblemsAnandha RajanNo ratings yet
- Velammal Engineering College Department of Cse Design and Analysis of Algorithm Unit V Notes Decision Trees (2 Marks)Document29 pagesVelammal Engineering College Department of Cse Design and Analysis of Algorithm Unit V Notes Decision Trees (2 Marks)Aravindhan RNo ratings yet
- P, NP, NP-Complete and NP-Hard Problems Explained in 40 CharactersDocument29 pagesP, NP, NP-Complete and NP-Hard Problems Explained in 40 CharactersDebdatta PraharajNo ratings yet
- Block 4Document46 pagesBlock 4anas abdullahiNo ratings yet
- Chapter 7Document11 pagesChapter 7Dandu Kalyan VarmaNo ratings yet
- Lecture 34 NP CompletenessDocument14 pagesLecture 34 NP CompletenessRitik chaudharyNo ratings yet
- NP CompleteDocument32 pagesNP CompleteSabaniNo ratings yet
- NP Completeness: Decision ProblemsDocument6 pagesNP Completeness: Decision Problemschandan bhartiNo ratings yet
- Lecture 16Document23 pagesLecture 16f20201862No ratings yet
- NP AlgoritmDocument23 pagesNP AlgoritmBulent DogruNo ratings yet
- Unit - VDocument22 pagesUnit - VJit Agg100% (1)
- Unit 3 - Analysis Design of Algorithm - WWW - Rgpvnotes.inDocument8 pagesUnit 3 - Analysis Design of Algorithm - WWW - Rgpvnotes.inPranjal ChawdaNo ratings yet
- cs590 s23 BrudaDocument8 pagescs590 s23 BrudaBENSON NGARINo ratings yet
- NP-Complete Problems and Approximation AlgorithmsDocument7 pagesNP-Complete Problems and Approximation AlgorithmsMatthew JenkinsNo ratings yet
- Assignment5 Drw2 BDocument5 pagesAssignment5 Drw2 BdwongaNo ratings yet
- Ads Unit - 5Document7 pagesAds Unit - 5MonicaNo ratings yet
- EditorialDocument12 pagesEditorialSara ArracheraNo ratings yet
- Dynamic Prgming & BacktrackingDocument98 pagesDynamic Prgming & Backtrackingharimano0% (1)
- Daa Unit Viii Notes 1Document7 pagesDaa Unit Viii Notes 1Sunil ChoudharyNo ratings yet
- Algo - Mod12 - NP-Hard and NP-Complete ProblemsDocument56 pagesAlgo - Mod12 - NP-Hard and NP-Complete ProblemsISSAM HAMADNo ratings yet
- Class 55Document29 pagesClass 55Garry MehrokNo ratings yet
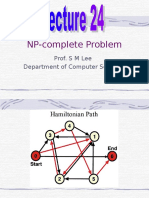
- NP-complete Problem: Prof. S M Lee Department of Computer ScienceDocument44 pagesNP-complete Problem: Prof. S M Lee Department of Computer ScienceAnirban BaralNo ratings yet
- Integer ProgrammingDocument5 pagesInteger ProgrammingChris Johnson100% (6)
- Unit V:: Design and Analysis of AlgorithmsDocument7 pagesUnit V:: Design and Analysis of AlgorithmsSairam N100% (1)
- A11 Philip PDFDocument23 pagesA11 Philip PDFPRERANA M DONTHINo ratings yet
- Daa Mod-5Document10 pagesDaa Mod-5Disha GudigarNo ratings yet
- Dynamic Programming in Python: Optimizing Rod Cutting AlgorithmsDocument6 pagesDynamic Programming in Python: Optimizing Rod Cutting AlgorithmsGonzaloAlbertoGaticaOsorioNo ratings yet
- Mcs 031 qns2 Image: Travelling Salesman Problem Previous PostDocument5 pagesMcs 031 qns2 Image: Travelling Salesman Problem Previous PostUmesh sharmaNo ratings yet
- NP Hard and NP CompleteDocument5 pagesNP Hard and NP Completevvvcxzzz3754No ratings yet
- Unit 3 - Analysis and Design of Algorithm - WWW - Rgpvnotes.inDocument11 pagesUnit 3 - Analysis and Design of Algorithm - WWW - Rgpvnotes.indixitraghav25No ratings yet
- Ch4 Divide and ConquerModifiedDocument56 pagesCh4 Divide and ConquerModifiedAdan A AlawnehNo ratings yet
- N P-Hard and N P-Complete ProblemsDocument12 pagesN P-Hard and N P-Complete ProblemsSagar ManeNo ratings yet
- Reductions:: I K I IDocument3 pagesReductions:: I K I Iamitswamiit08No ratings yet
- NP-Completeness IntroDocument3 pagesNP-Completeness IntroRahul GoyalNo ratings yet
- Toc - Unit - 5 P, NP Problems P, NP, NP-Complete, NP-HardDocument6 pagesToc - Unit - 5 P, NP Problems P, NP, NP-Complete, NP-HardHARININo ratings yet
- Name 1: - Drexel Username 1Document4 pagesName 1: - Drexel Username 1Bao DangNo ratings yet
- Daa Unit 5Document22 pagesDaa Unit 5KaarletNo ratings yet
- Lect20 NP 3satDocument6 pagesLect20 NP 3satAnthony-Dimitri ANo ratings yet
- Sample Problems in Discrete Mathematics: 1 Using Mathematical InductionDocument5 pagesSample Problems in Discrete Mathematics: 1 Using Mathematical InductionStoriesofsuperheroesNo ratings yet
- 2008 WOOT SequencesDocument9 pages2008 WOOT Sequences-Justin KityNo ratings yet
- Lect18 NP DefsDocument5 pagesLect18 NP DefsAnthony-Dimitri ANo ratings yet
- DAA R19 - Unit-5Document12 pagesDAA R19 - Unit-5Sunny Kumar [516]No ratings yet
- NP Hard and NP Complete Problems Basic ConceptsDocument67 pagesNP Hard and NP Complete Problems Basic ConceptskvbommidiNo ratings yet
- Introduction To Dynamic Programming: Ryan Jian November 8, 2013Document4 pagesIntroduction To Dynamic Programming: Ryan Jian November 8, 2013ALEXIS HERNÁN SUSANIBAR ROSASNo ratings yet
- P vs NP: Understanding the Complexity ClassesDocument68 pagesP vs NP: Understanding the Complexity ClassesShriram RamachandranNo ratings yet
- Chapter-7Document10 pagesChapter-7Sujan ThapaliyaNo ratings yet
- Unit 4Document28 pagesUnit 4Dr. Nageswara Rao EluriNo ratings yet
- Daa Unit VnotesDocument6 pagesDaa Unit VnotesAdi SinghNo ratings yet
- Module 5Document24 pagesModule 5abhindraabhi7No ratings yet
- Imp Notes For Final Term by Daniyal Subhani Cs502 Important Question With Answer PreparedDocument9 pagesImp Notes For Final Term by Daniyal Subhani Cs502 Important Question With Answer PreparedYasir WaseemNo ratings yet
- HW 1Document3 pagesHW 1Prakhar SrivastavaNo ratings yet
- 55 - BD - Data Structures and Algorithms - Narasimha KarumanchiDocument19 pages55 - BD - Data Structures and Algorithms - Narasimha KarumanchiTritonCPCNo ratings yet
- OPTIMIZATION TECHNIQUESDocument12 pagesOPTIMIZATION TECHNIQUESAkhil KhajuriaNo ratings yet
- Topic-Npc Conecept With Example-UnitvDocument8 pagesTopic-Npc Conecept With Example-Unitvjaipalsinghmalik47No ratings yet
- NP-complete and NP-hard problems explainedDocument19 pagesNP-complete and NP-hard problems explainedUpasana BhardwajNo ratings yet
- Dominating Set ProblemDocument13 pagesDominating Set ProblemMaribel Bustos GutierrezNo ratings yet
- Advanced Algorithms Course. Lecture Notes. Part 4: Using Linear Programming For Approximation AlgorithmsDocument5 pagesAdvanced Algorithms Course. Lecture Notes. Part 4: Using Linear Programming For Approximation AlgorithmsKasapaNo ratings yet
- The Classes: P P P Pandnp NP NP NPDocument11 pagesThe Classes: P P P Pandnp NP NP NPtheresa.painterNo ratings yet
- Adc 10Document42 pagesAdc 10ati atiNo ratings yet
- Adc 12Document53 pagesAdc 12ati atiNo ratings yet
- Adc 4Document61 pagesAdc 4ati atiNo ratings yet
- Adc 11Document38 pagesAdc 11ati atiNo ratings yet
- Adc 5Document34 pagesAdc 5ati atiNo ratings yet
- Adc 9Document60 pagesAdc 9ati atiNo ratings yet
- Adc 3Document49 pagesAdc 3ati atiNo ratings yet
- Adc 7Document52 pagesAdc 7ati atiNo ratings yet
- Adc 8Document46 pagesAdc 8ati atiNo ratings yet
- Semantic Web-Education Ontology ApplicationDocument19 pagesSemantic Web-Education Ontology Applicationati atiNo ratings yet
- Baseband and Passband Data 2. Baseband and Passband Data Transmissions (Contin.)Document12 pagesBaseband and Passband Data 2. Baseband and Passband Data Transmissions (Contin.)ati atiNo ratings yet
- QAM Modulation ExplainedDocument7 pagesQAM Modulation Explainedati atiNo ratings yet
- Error Control (Contin.) 3. Error Control (Contin.)Document20 pagesError Control (Contin.) 3. Error Control (Contin.)ati atiNo ratings yet
- Error Control 3. Error ControlDocument8 pagesError Control 3. Error Controlati atiNo ratings yet
- Cyber Intelligence and Diplomacy The SecDocument43 pagesCyber Intelligence and Diplomacy The SecdwightNo ratings yet
- 21-35-43-Explora o de CookiesDocument46 pages21-35-43-Explora o de CookiesBonapparte Do TreemNo ratings yet
- Huawei BBPDocument8 pagesHuawei BBPEmreNo ratings yet
- Smart Helmet For Coal Mines Safety Monitoring With Mobile AppDocument5 pagesSmart Helmet For Coal Mines Safety Monitoring With Mobile AppInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- SDMC RDK-B OverviewDocument5 pagesSDMC RDK-B OverviewgocenikNo ratings yet
- JhkuiDocument5 pagesJhkuiZakorado KariNo ratings yet
- CB Ep100Document146 pagesCB Ep100to0984903132No ratings yet
- Test Cases for Library Management Software Features and FunctionsDocument4 pagesTest Cases for Library Management Software Features and Functionsdeex arnoldNo ratings yet
- Introduction To Fortran: The Fortran Programming LanguageDocument16 pagesIntroduction To Fortran: The Fortran Programming LanguageChrisNo ratings yet
- User Datagram Program (UDP) : TCP/IP Protocol SuiteDocument46 pagesUser Datagram Program (UDP) : TCP/IP Protocol Suitenabeel hasanNo ratings yet
- Bea Weblogic MibDocument976 pagesBea Weblogic MibsebanadoNo ratings yet
- Atv12 Drive Atv12h075m2Document10 pagesAtv12 Drive Atv12h075m2Muhammad KhairuddinNo ratings yet
- Computer Networks: by Damera Venkatesh Assistant ProfessorDocument22 pagesComputer Networks: by Damera Venkatesh Assistant ProfessorTAMMISETTY VIJAY KUMARNo ratings yet
- ABC: An Industrial-Strength Logic Synthesis and Verification ToolDocument29 pagesABC: An Industrial-Strength Logic Synthesis and Verification ToolM Chandan ShankarNo ratings yet
- Uber - LeetCodeDocument14 pagesUber - LeetCodeKumar GauravNo ratings yet
- Letran Graduate School Wireless LAN ProjectDocument11 pagesLetran Graduate School Wireless LAN ProjectAnti VirusNo ratings yet
- Windows 10 Tips, Tricks & Apps PDFDocument148 pagesWindows 10 Tips, Tricks & Apps PDF@TIK100% (1)
- Tufail MaryamDocument43 pagesTufail Maryamprueba222222No ratings yet
- International Case Study - EbayDocument39 pagesInternational Case Study - EbayMBA2010GCNo ratings yet
- Data Stage DataIntegration - Fund - All - Slides PDFDocument476 pagesData Stage DataIntegration - Fund - All - Slides PDFwanlicNo ratings yet
- Efektivitas Pelayanan Surat Izin Usaha PerdaganganDocument121 pagesEfektivitas Pelayanan Surat Izin Usaha PerdaganganSeluruh Dokumentasi1No ratings yet
- Chapter 4 - Arrays Pointers and StringDocument28 pagesChapter 4 - Arrays Pointers and StringGébrè SîllãsíêNo ratings yet
- Curriculum-Vitae: Sunil Kumar Permanent AddressDocument5 pagesCurriculum-Vitae: Sunil Kumar Permanent AddressKiran ModiNo ratings yet
- MCQs in Engineering Management Part I - Answers - PinoyBIX EngineeringDocument4 pagesMCQs in Engineering Management Part I - Answers - PinoyBIX Engineeringbk yNo ratings yet
- NEO Teachers GuideDocument66 pagesNEO Teachers GuideangelNo ratings yet
- TLD-Furnace-O-1010-001 COMD000408Document44 pagesTLD-Furnace-O-1010-001 COMD000408Omar SuarezNo ratings yet
- Waman S Jawadekar Management Information Systems Text and Cases A Global Digital Enterprise Perspective McGraw Hill Education India 2015Document832 pagesWaman S Jawadekar Management Information Systems Text and Cases A Global Digital Enterprise Perspective McGraw Hill Education India 2015sneha kotawadekarNo ratings yet
- Oracle Form PersonalizationDocument84 pagesOracle Form PersonalizationsetikazamNo ratings yet
- Olifant: Translation Memory Editor: Tms and GlossariesDocument11 pagesOlifant: Translation Memory Editor: Tms and GlossariesSIMONE VIEIRA RESENDENo ratings yet
- Storage and Information Management (8 It 3)Document11 pagesStorage and Information Management (8 It 3)Manmohan Singh100% (2)