You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
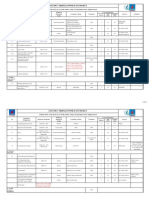
- Itp For Steel Structure Erection (Content) Rev.1Document3 pagesItp For Steel Structure Erection (Content) Rev.1Anonymous nLMJGu100% (6)
- Internet and Web Programming Project Report Review 3: Travel Tours Booking SystemDocument22 pagesInternet and Web Programming Project Report Review 3: Travel Tours Booking SystemPrayNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Path To SiriusDocument11 pagesThe Path To Siriusstarseed411100% (4)
- Science Lesson Plan - Refraction LightDocument5 pagesScience Lesson Plan - Refraction Lightapi-45770214250% (2)
- Table Details: Student TableDocument25 pagesTable Details: Student TablePrayNo ratings yet
- Cryptography Using Artificial Neural NetworkDocument18 pagesCryptography Using Artificial Neural NetworkPrayNo ratings yet
- Automated Image Captioning Using CNN and RNNDocument17 pagesAutomated Image Captioning Using CNN and RNNPrayNo ratings yet
- ESEx 1Document3 pagesESEx 1PrayNo ratings yet
- Natural Language Processing Project Review-3: Cyber Bullying Detection System Using Sentiment AnalysisDocument30 pagesNatural Language Processing Project Review-3: Cyber Bullying Detection System Using Sentiment AnalysisPrayNo ratings yet
- Microprocessor and Interfacing CSE-2006: TOPIC - Water Level Indicator Using 8051 MicrocontrollerDocument13 pagesMicroprocessor and Interfacing CSE-2006: TOPIC - Water Level Indicator Using 8051 MicrocontrollerPrayNo ratings yet
- WorkflowDocument2 pagesWorkflowPrayNo ratings yet
- Robotics Project Review-1: Title:-Autonomous Car SimulationDocument8 pagesRobotics Project Review-1: Title:-Autonomous Car SimulationPrayNo ratings yet
- Bayesian Hierarchical Models - With Applications Using R - Congdon P.D. (CRC 2020) (2nd Ed.)Document593 pagesBayesian Hierarchical Models - With Applications Using R - Congdon P.D. (CRC 2020) (2nd Ed.)Armai Zsolt100% (2)
- E08 - The Gracious Flow of Dhamma 1Document83 pagesE08 - The Gracious Flow of Dhamma 1Geetika CnNo ratings yet
- Sikagrout 215: General Purpose Non-Shrink Cementitious GroutDocument3 pagesSikagrout 215: General Purpose Non-Shrink Cementitious GroutDani LerviNo ratings yet
- Surveying Formulas (CESURVE)Document29 pagesSurveying Formulas (CESURVE)Chamberlaine LopezNo ratings yet
- How Is Turing Test Used To Evaluate Intelligence of A Machine?Document4 pagesHow Is Turing Test Used To Evaluate Intelligence of A Machine?Secdition 30No ratings yet
- Advertisement Notice No. 01 of 2014 Dated: 13 .08. 2014Document25 pagesAdvertisement Notice No. 01 of 2014 Dated: 13 .08. 2014Err33No ratings yet
- Lesson 2 Fiction and CNFDocument45 pagesLesson 2 Fiction and CNFEsther A. EdaniolNo ratings yet
- SHR5000 OM AMEN0096 2018 05 30 WebDocument40 pagesSHR5000 OM AMEN0096 2018 05 30 WebhdbryansNo ratings yet
- Boiler Installation Procedures With SamplesDocument67 pagesBoiler Installation Procedures With SamplesMalik RiazNo ratings yet
- Stages of Evolution of ManDocument3 pagesStages of Evolution of ManAbdus samiNo ratings yet
- Control and Automation of Electric Power Distribution SystemsDocument31 pagesControl and Automation of Electric Power Distribution SystemsFahdAhmedNo ratings yet
- Social Science Notes (8) History Ch - 1 How, When & Where】: Written by UtsavDocument2 pagesSocial Science Notes (8) History Ch - 1 How, When & Where】: Written by UtsavYNo ratings yet
- Layla Lamar - Project 3 in Design Recap 1Document3 pagesLayla Lamar - Project 3 in Design Recap 1api-544753838No ratings yet
- C7884 SeriesDocument5 pagesC7884 Seriestbuckup2175No ratings yet
- The Interpretation of Geochemical Survey DataDocument49 pagesThe Interpretation of Geochemical Survey DataJhony Wilson Vargas BarbozaNo ratings yet
- 7SR224 - Argus Technical Manual Chapter 2 Settings App 4 R4a 3aDocument343 pages7SR224 - Argus Technical Manual Chapter 2 Settings App 4 R4a 3aGerald GribelNo ratings yet
- As 1012.3.1-2014Document9 pagesAs 1012.3.1-2014heyh jdjNo ratings yet
- HPC Unit. 1x PDFDocument21 pagesHPC Unit. 1x PDFSaix CreationsNo ratings yet
- Assessment Task 1 Instructions: Provide Answers To All of The Questions BelowDocument6 pagesAssessment Task 1 Instructions: Provide Answers To All of The Questions BelowAgus BudionoNo ratings yet
- Bh205e Ac 20170905061602Document4 pagesBh205e Ac 20170905061602amir sadighiNo ratings yet
- Phos Tag - GUIDEBOOK 2016Document32 pagesPhos Tag - GUIDEBOOK 2016Susan HsiaoNo ratings yet
- Mil STD 3013Document127 pagesMil STD 3013Mirza Muneeb AhsanNo ratings yet
- Breaking The Silence - Art TherapyDocument43 pagesBreaking The Silence - Art TherapyAdriana100% (1)
- PDF Document PDFDocument2 pagesPDF Document PDFQuyen UongNo ratings yet
- Refers To The Transformation of Resources Into Output of Goods and Services - Short RunDocument17 pagesRefers To The Transformation of Resources Into Output of Goods and Services - Short RunKureshi SanaNo ratings yet
- VOCABULARY - Starter Unit: © Oxford University PressDocument1 pageVOCABULARY - Starter Unit: © Oxford University PressMaria SolNo ratings yet
- LS1 Eng. DLP-JHS (Subject-Verb Agreement)Document5 pagesLS1 Eng. DLP-JHS (Subject-Verb Agreement)Bong CardonaNo ratings yet