You might also like
- The Dye Sublimators BibleDocument62 pagesThe Dye Sublimators BibleRicardo Pirela100% (1)
- Affinity Photo Manual PDFDocument644 pagesAffinity Photo Manual PDFcaianap85% (34)
- Cost Estimating Manual for Pipelines and Marine Structures: New Printing 1999From EverandCost Estimating Manual for Pipelines and Marine Structures: New Printing 1999Rating: 5 out of 5 stars5/5 (2)
- E Book Image File Types ExplainedDocument10 pagesE Book Image File Types ExplainedVipin kumarNo ratings yet
- Blender UvDocument141 pagesBlender UvMarcos LinsNo ratings yet
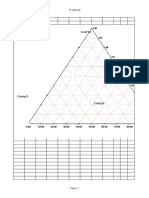
- TriangularDocument6 pagesTriangularResa AstutiNo ratings yet
- TriangularDocument6 pagesTriangularKrlos AlvarezNo ratings yet
- Free Cmyk Chart Printable Download A4Document1 pageFree Cmyk Chart Printable Download A4grafica bituNo ratings yet
- 100 Comp1: TriagonalDocument6 pages100 Comp1: TriagonallinocastilloNo ratings yet
- TriangularDocument6 pagesTriangularc_b_umashankarNo ratings yet
- 100 Comp1: TriagonalDocument6 pages100 Comp1: TriagonalPutu AstiniNo ratings yet
- 100 Comp1: TriagonalDocument6 pages100 Comp1: Triagonalc_b_umashankarNo ratings yet
- Triangulo EquiláteroDocument6 pagesTriangulo EquiláteroMercedesVelizNo ratings yet
- Free Cmyk Chart Printable Download US LetterDocument1 pageFree Cmyk Chart Printable Download US Letteransarinameer374No ratings yet
- Free Cmyk Chart PrintableDocument1 pageFree Cmyk Chart PrintablesldasnulaNo ratings yet
- Diagrama TriangularDocument6 pagesDiagrama TriangularNoelia Hernandez BelloNo ratings yet
- Datashet For Mechanical Property (New)Document24 pagesDatashet For Mechanical Property (New)abrarbin373737No ratings yet
- Perfil de Bloques Vicencio EjemploDocument194 pagesPerfil de Bloques Vicencio EjemploFRANCOONo ratings yet
- 100 Water: TriagonalDocument6 pages100 Water: TriagonaldanicaNo ratings yet
- DiciembreDocument246 pagesDiciembreMarcela SchisanoNo ratings yet
- DiciembreDocument199 pagesDiciembreIsidora Josefa Emilia Quiroz SchisanoNo ratings yet
- Factura Monique-2Document11 pagesFactura Monique-2Monica BogarinNo ratings yet
- Hietogramas A Partir Curvas IDFDocument40 pagesHietogramas A Partir Curvas IDFJuan Carlos TamayoNo ratings yet
- UntitledDocument255 pagesUntitledsheilaNo ratings yet
- Extras Armare 2020 Pe NiveluriDocument15 pagesExtras Armare 2020 Pe Niveluriichim DragosNo ratings yet
- I (K T M) /T N: Tiempo de Concentración de La Cuenca (Fórmula California)Document40 pagesI (K T M) /T N: Tiempo de Concentración de La Cuenca (Fórmula California)Max PretelNo ratings yet
- Templete Auto Calculate Exam Marks SPM Zaini 2022Document10 pagesTemplete Auto Calculate Exam Marks SPM Zaini 2022MUHAMAD ZAINI BIN ISMAIL� SMK KUALA PEGANGNo ratings yet
- Kombinasi @1600 KWDocument4 pagesKombinasi @1600 KWPetrus GunturNo ratings yet
- 01 January 2023 Fox and Rabbit Mystery Sampler v2Document18 pages01 January 2023 Fox and Rabbit Mystery Sampler v2Ineke KosterNo ratings yet
- Copia de Survey Ixachi 50 EditableDocument12 pagesCopia de Survey Ixachi 50 EditableArturo CordovaNo ratings yet
- Grade BookDocument6 pagesGrade BookJohn Philip ApulogNo ratings yet
- Fd-00209 Cálculo Cuadro de Cargas Eléctrico Baja Tensión2Document9 pagesFd-00209 Cálculo Cuadro de Cargas Eléctrico Baja Tensión2FridaFraireMarquezNo ratings yet
- Nombre y Apellidos 23 de Marzo 28 30 4 de Abril 6Document5 pagesNombre y Apellidos 23 de Marzo 28 30 4 de Abril 6JhonnNo ratings yet
- Analisis Rekap Nilai Contoh01Document8 pagesAnalisis Rekap Nilai Contoh01ErmaNo ratings yet
- Analisis Rekap Nilai ContohDocument8 pagesAnalisis Rekap Nilai ContohErmaNo ratings yet
- 50Document2 pages50arquimedes lisNo ratings yet
- Borderou de Corectare E.N.Document1 pageBorderou de Corectare E.N.Anonymous befTAT2LNo ratings yet
- Stock Mentain in Excel by DEEPAK EDUWORLDDocument10 pagesStock Mentain in Excel by DEEPAK EDUWORLDAdnan Raja GkNo ratings yet
- Stock Mentain in Excel by DEEPAK EDUWORLDDocument10 pagesStock Mentain in Excel by DEEPAK EDUWORLDAdnan Raja GkNo ratings yet
- My Data Axcle and Best ExpDocument10 pagesMy Data Axcle and Best ExpAdnan Raja GkNo ratings yet
- Stock Mentain in ExceDocument10 pagesStock Mentain in ExceAdnan Raja GkNo ratings yet
- Report Daily ActivityDocument6 pagesReport Daily ActivityjumbomartinternetNo ratings yet
- Pyeongtaek - OutDocument3 pagesPyeongtaek - OutCINTIANo ratings yet
- Pyramid Weight Lifting ChartDocument3 pagesPyramid Weight Lifting ChartJoshua WhiteNo ratings yet
- Menghitung Statistika Regresi-1Document7 pagesMenghitung Statistika Regresi-1El divoNo ratings yet
- Ulsan - inDocument4 pagesUlsan - inCINTIANo ratings yet
- I K T T: Tiempo de Concentración de La CuencaDocument40 pagesI K T T: Tiempo de Concentración de La CuencaManuel FernandoNo ratings yet
- Muh - Rizki AfandiDocument126 pagesMuh - Rizki AfandiM Riski AfandiNo ratings yet
- Curva de CargaDocument135 pagesCurva de CargaPiero GuerreroNo ratings yet
- Cuadro de Carga Local ComercialDocument14 pagesCuadro de Carga Local ComercialDiegoNo ratings yet
- Duct Area Calculator R5Document188 pagesDuct Area Calculator R5Trần Khắc ĐộNo ratings yet
- Class Record: Region Division School NameDocument8 pagesClass Record: Region Division School NameJay Ann Ilao SalendrezNo ratings yet
- Row DAN URA Dodatek 1pesek Cement Voda Dodatek 2rec. Cemerec. Pesek 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46Document22 pagesRow DAN URA Dodatek 1pesek Cement Voda Dodatek 2rec. Cemerec. Pesek 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46dinoNo ratings yet
- Report Daily ActivityDocument6 pagesReport Daily ActivityjumbomartinternetNo ratings yet
- Veeam Replication Diary 2022Document3 pagesVeeam Replication Diary 2022MarioussNo ratings yet
- DiffusionDocument164 pagesDiffusionmamat santosNo ratings yet
- Absen KaryawaN 2024Document8 pagesAbsen KaryawaN 2024Irna TampubolonNo ratings yet
- Copia de Sheila Ribera Informatica 1.0Document30 pagesCopia de Sheila Ribera Informatica 1.0Julio Cesar PeducasseNo ratings yet
- Mini Mult GrupalDocument14 pagesMini Mult GrupalKamy Coila MurilloNo ratings yet
- Cuadro de Cargas Eléctricas Ejemplo TrifásicoDocument15 pagesCuadro de Cargas Eléctricas Ejemplo TrifásicoMau AcostaNo ratings yet
- Absen KaryawaN 2024Document6 pagesAbsen KaryawaN 2024Irna TampubolonNo ratings yet
- Tabela 100 Garantia de AcertosDocument3 pagesTabela 100 Garantia de AcertosÁtila FernandesNo ratings yet
- Sambelia Hujan HarianDocument57 pagesSambelia Hujan HarianAbu Farhan Achmad RivaniNo ratings yet
- Daftar Nilai k13Document6 pagesDaftar Nilai k13Yudi Nur RohmanNo ratings yet
- 4 ResamplingDocument38 pages4 Resamplingjiarui qiuNo ratings yet
- 5 EdgeDetectionDocument38 pages5 EdgeDetectionjiarui qiuNo ratings yet
- 3 TransformationDocument31 pages3 Transformationjiarui qiuNo ratings yet
- 1 IntroductionDocument52 pages1 Introductionjiarui qiuNo ratings yet
- ECE2013 MP1 DescriptionDocument5 pagesECE2013 MP1 Descriptionjiarui qiuNo ratings yet
- An Improved Underwater Image Enhancement TechniqueDocument6 pagesAn Improved Underwater Image Enhancement TechniqueIJRASETPublicationsNo ratings yet
- Fast Hand Feature Extraction Based On Connected Component Labeling, Distance Transform and Hough TransformDocument2 pagesFast Hand Feature Extraction Based On Connected Component Labeling, Distance Transform and Hough TransformNishant JadhavNo ratings yet
- Laporan Praktikum Pengolahan Citra Praktek 8 (Image Noise)Document14 pagesLaporan Praktikum Pengolahan Citra Praktek 8 (Image Noise)indah tyas khumalasariNo ratings yet
- Rigged Models For 3DS MAX - Catalogue PDFDocument76 pagesRigged Models For 3DS MAX - Catalogue PDFSilviu CiuleiNo ratings yet
- RadiographyDocument121 pagesRadiographyzano_adam100% (1)
- Modulos Precableados-144Document1 pageModulos Precableados-144Inmsa SasNo ratings yet
- TGCS 2010 Media KitDocument8 pagesTGCS 2010 Media KitsirfurproductionsNo ratings yet
- Complementary Color SchemeDocument24 pagesComplementary Color SchemeMary Jane AnarnaNo ratings yet
- Q2Document4 pagesQ2jane jabarNo ratings yet
- The Role of Opengl in Reference ModelDocument31 pagesThe Role of Opengl in Reference ModelwalelegneNo ratings yet
- DSP ProjectDocument4 pagesDSP ProjectSHANNON BOSCO FRANCIS TORCATO 17BMD0083No ratings yet
- Color RGBDocument5 pagesColor RGBanbuchelvanNo ratings yet
- Ch09 Dipum ArtDocument33 pagesCh09 Dipum ArtMohammed AL-MaaitahNo ratings yet
- SweetFX ReadmeDocument7 pagesSweetFX Readmemuhammad fahruroziNo ratings yet
- Settings After Calibration For: Samsung 40KU6072 TVDocument3 pagesSettings After Calibration For: Samsung 40KU6072 TVionut310100% (1)
- Image Editing: By: Ms. Gemma F. Lamsen - T-1Document37 pagesImage Editing: By: Ms. Gemma F. Lamsen - T-1Gem Lam SenNo ratings yet
- The Basics of Maxillofacial Cone Beam Computed Tomography: Allan G. Farman and William C. ScarfeDocument12 pagesThe Basics of Maxillofacial Cone Beam Computed Tomography: Allan G. Farman and William C. ScarfeMANUELA GUTIERREZ MESANo ratings yet
- Digital Image Processing Lab Manual Part-1Document41 pagesDigital Image Processing Lab Manual Part-1Md. Jakir HossainNo ratings yet
- Step 1: Create A New Document (600X700px) - Fill Your Canvas With BlackDocument56 pagesStep 1: Create A New Document (600X700px) - Fill Your Canvas With Blackmilla yanuarNo ratings yet
- Hue, Tint, Tone, and Shade - What's The DifferenceDocument1 pageHue, Tint, Tone, and Shade - What's The DifferencePunkajGuptaNo ratings yet
- Photoshop Edit LogDocument171 pagesPhotoshop Edit LogJeremyRPalmerNo ratings yet
- Color Theory BasicsDocument8 pagesColor Theory BasicsSajid HolyNo ratings yet
- Visual Variables-Mapcolor PDFDocument21 pagesVisual Variables-Mapcolor PDFSaketh SentinalNo ratings yet
- 10040-00-131-Es-0008-Att01 Color Coding Summary Table Color Coding SummaryDocument1 page10040-00-131-Es-0008-Att01 Color Coding Summary Table Color Coding SummarybassamNo ratings yet
- Custom PPFDocument28 pagesCustom PPFkekekennieNo ratings yet