You might also like
- HLeiteDocument6 pagesHLeiteLê Trung DũngNo ratings yet
- Guide for Asset Integrity Managers: A Comprehensive Guide to Strategies, Practices and BenchmarkingFrom EverandGuide for Asset Integrity Managers: A Comprehensive Guide to Strategies, Practices and BenchmarkingNo ratings yet
- Types of MaintenanceDocument6 pagesTypes of MaintenancerahimuNo ratings yet
- Maintenance Planning: Power Management Institute NoidaDocument154 pagesMaintenance Planning: Power Management Institute NoidanagarajsumaNo ratings yet
- Modern Maintenance StrategiesDocument6 pagesModern Maintenance StrategiesLungelo HlongwaneNo ratings yet
- Machine Reliability and Condition Monitoring: A Comprehensive Guide to Predictive Maintenance PlanningFrom EverandMachine Reliability and Condition Monitoring: A Comprehensive Guide to Predictive Maintenance PlanningRating: 4.5 out of 5 stars4.5/5 (2)
- Maintenance p;anningDocument27 pagesMaintenance p;anningbahreabdellaNo ratings yet
- ME2037 - Maintenance Engineering (Eighth Semester Mech) Question BankDocument20 pagesME2037 - Maintenance Engineering (Eighth Semester Mech) Question BankSK NAGOOR VALINo ratings yet
- MaintenanceDocument75 pagesMaintenanceshahzad afzal100% (21)
- Maintenance Engineering 5.0: Key ConceptsDocument23 pagesMaintenance Engineering 5.0: Key Conceptsodeke aronNo ratings yet
- Maintenance Management IM - 503 Lecture - 3: Maintenance StrategiesDocument19 pagesMaintenance Management IM - 503 Lecture - 3: Maintenance StrategiesWasif AzimNo ratings yet
- Medical Equipment Maintenance: Dr. Mahmoud Al-RumaimaDocument28 pagesMedical Equipment Maintenance: Dr. Mahmoud Al-Rumaimaمحمد الاشولNo ratings yet
- OPERATIONS AND MAINTENANCE STRATEGIESDocument10 pagesOPERATIONS AND MAINTENANCE STRATEGIESDranreb Jazzver BautistaNo ratings yet
- Maintance PlanningDocument0 pagesMaintance PlanningSHIVAJI CHOUDHURY100% (1)
- Intelligent MaintenanceDocument10 pagesIntelligent MaintenanceMohamed KhaledNo ratings yet
- Glossary: Andon (J) Availability Failure Modes and Effects Analysis (FMEA)Document3 pagesGlossary: Andon (J) Availability Failure Modes and Effects Analysis (FMEA)Juan Camilo MolanoNo ratings yet
- Maintenance and Installation of Machinery: (Meng 5231)Document21 pagesMaintenance and Installation of Machinery: (Meng 5231)Milion dugumaNo ratings yet
- chapter 1Document51 pageschapter 1arayaNo ratings yet
- GCP Sect9 EngineeringMaintenanceDocument9 pagesGCP Sect9 EngineeringMaintenancelevanvui161No ratings yet
- Maintenance ManagementDocument14 pagesMaintenance ManagementAasishPatilNo ratings yet
- Asset Mgt 101: 4 Maintenance StrategiesDocument6 pagesAsset Mgt 101: 4 Maintenance StrategiestristanmaharajNo ratings yet
- Maximizing maintenance efficiency through optimizationDocument4 pagesMaximizing maintenance efficiency through optimizationagmas katanaNo ratings yet
- Research Area 2Document23 pagesResearch Area 2OKIDI Thomas BecketNo ratings yet
- Design Reliability and MaintenabilityDocument4 pagesDesign Reliability and MaintenabilitymichealNo ratings yet
- Cost Benefits of Postponing Time-Based Maintenance Under LifetimeDocument7 pagesCost Benefits of Postponing Time-Based Maintenance Under LifetimeM Luthfi Al MudzakiNo ratings yet
- Chap 6 (6-3 R and M)FfDocument54 pagesChap 6 (6-3 R and M)FfAbeyu AssefaNo ratings yet
- Introduction To Maintenance and Reliability EngineeringDocument6 pagesIntroduction To Maintenance and Reliability EngineeringJohn Robyn HernandezNo ratings yet
- 1&2 - Chapter 1 Introduction Maintenance and Chapter 2 Theories of DamagesDocument39 pages1&2 - Chapter 1 Introduction Maintenance and Chapter 2 Theories of Damageskeno teshomeNo ratings yet
- Analysis of Maintenance Systems in Jet Dyeing Machine Components Using The Age Replacement MethodDocument8 pagesAnalysis of Maintenance Systems in Jet Dyeing Machine Components Using The Age Replacement MethodFAUZI HERMAWAN AMDNo ratings yet
- 1578910392 (1)Document14 pages1578910392 (1)PreciousNo ratings yet
- ME6012-Maintenance-Engineering 2 MarksDocument14 pagesME6012-Maintenance-Engineering 2 MarksAravind SelvaNo ratings yet
- Industrial Preventive MaintenanceDocument360 pagesIndustrial Preventive MaintenanceRonald Acbang100% (2)
- Affiliated To APJ Abdul Kalam Technological UniversityDocument19 pagesAffiliated To APJ Abdul Kalam Technological UniversitySHANASHIRIN CNo ratings yet
- Maintenance QBDocument43 pagesMaintenance QBajitsssNo ratings yet
- Corrective MaintenanceDocument17 pagesCorrective Maintenanceearacenac100% (3)
- Predictive Maintenance - Is An Attempt To DetermineDocument1 pagePredictive Maintenance - Is An Attempt To DetermineRoseanne Binayao LontianNo ratings yet
- MGT MNT PLN PRST2NDDraftDocument139 pagesMGT MNT PLN PRST2NDDraftchibssa alemayehuNo ratings yet
- Maintenance TypesDocument4 pagesMaintenance TypesMotasem AbushanabNo ratings yet
- TRAINING ON MAINTENANCE SYSTEM OPTIMIZATIONDocument32 pagesTRAINING ON MAINTENANCE SYSTEM OPTIMIZATIONmubashirNo ratings yet
- Proactive Maintenance Schedule Imperfect Repairs Wu2019Document12 pagesProactive Maintenance Schedule Imperfect Repairs Wu2019Nurazizul HishamNo ratings yet
- Met82 Maintenanceandsafetyengineering (3 0 0 3) Unit-IDocument51 pagesMet82 Maintenanceandsafetyengineering (3 0 0 3) Unit-IM.ThirunavukkarasuNo ratings yet
- Maintenance 2 Mark PDFDocument38 pagesMaintenance 2 Mark PDFSaravanan HNo ratings yet
- Nuevas Tendencias en Un Sistema de Mantenimiento de VehiculosDocument9 pagesNuevas Tendencias en Un Sistema de Mantenimiento de VehiculosJoan Manuel Moreno RojasNo ratings yet
- Maintenance Engineering Questions and AnswersDocument46 pagesMaintenance Engineering Questions and Answersakbar_mdhNo ratings yet
- Maintenance of Medical EquipmentDocument33 pagesMaintenance of Medical EquipmentAbe CyberCrewPlusDotmy100% (1)
- CHP 5 FRSI 2043 Type of MaintenanceDocument41 pagesCHP 5 FRSI 2043 Type of MaintenanceFusi MokoenaNo ratings yet
- Plant MaintenanceDocument10 pagesPlant MaintenanceGatut SulianaNo ratings yet
- Hme 2301 Topic 6Document9 pagesHme 2301 Topic 6Mofy AllyNo ratings yet
- Aintenance: Ain Concepts and DefinitionsDocument21 pagesAintenance: Ain Concepts and DefinitionsMostafa AhmedNo ratings yet
- #5 Maintenance CostDocument49 pages#5 Maintenance CostKhoirul Be100% (1)
- MM 25th AugustDocument12 pagesMM 25th AugustAbhishek ChaubeyNo ratings yet
- Introduction To Maintenance and Replacement Models: Chapter - 1Document38 pagesIntroduction To Maintenance and Replacement Models: Chapter - 1engineer engrNo ratings yet
- Vibration Analysis - A Proven Technique As A Predictive Maintenance ToolDocument9 pagesVibration Analysis - A Proven Technique As A Predictive Maintenance ToolMansoor KhanNo ratings yet
- 9399 - Preventive Maintenance For Industrial ApplicationDocument6 pages9399 - Preventive Maintenance For Industrial ApplicationM Luthfi Al MudzakiNo ratings yet
- Me6012 - Maintenance EngineeringDocument13 pagesMe6012 - Maintenance EngineeringIyswaryaNo ratings yet
- Maintain Equipment PerformanceDocument9 pagesMaintain Equipment PerformanceMoe Thiri ZunNo ratings yet
- 1.2 - Basic Awareness For System MaintenanceDocument13 pages1.2 - Basic Awareness For System MaintenanceNitin BNo ratings yet
- Micro 133 Midterm Lecture 2 - IO Interfacing With 8255 & Assembly Language - EditedDocument10 pagesMicro 133 Midterm Lecture 2 - IO Interfacing With 8255 & Assembly Language - EditedKeilla Romabiles LeopandoNo ratings yet
- CTPC Chapter 2 MCQDocument12 pagesCTPC Chapter 2 MCQNUR AZNAN PATWARY 45 Batch DCENo ratings yet
- PCN V19-001-484754120aDocument6 pagesPCN V19-001-484754120ajonatas Cassiano da silvaNo ratings yet
- B.tech. Civil Engineering Full Syllabus IndiaDocument118 pagesB.tech. Civil Engineering Full Syllabus IndiaAnubhav GargNo ratings yet
- Us 5268501Document7 pagesUs 5268501Shivam VinothNo ratings yet
- Zhang 2016Document8 pagesZhang 2016Roberto GutierrezNo ratings yet
- Service Manual: Super PlusDocument250 pagesService Manual: Super PlusАндрей Рычков100% (1)
- Material TestingDocument7 pagesMaterial TestingkimsonNo ratings yet
- UPA Type Series BookletDocument122 pagesUPA Type Series BookletRicardo BarrosNo ratings yet
- Material Safety Data Sheet: Section 1: Product and Company IdentificationDocument4 pagesMaterial Safety Data Sheet: Section 1: Product and Company IdentificationIka KusumawatiNo ratings yet
- Roofing Styles in Traditional Nigerian SocietyDocument15 pagesRoofing Styles in Traditional Nigerian SocietyOluwaseyi AdegokeNo ratings yet
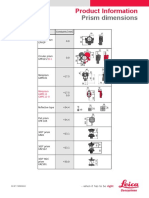
- Leica Prism Constants PDFDocument1 pageLeica Prism Constants PDFAntonio JelacicNo ratings yet
- Orgone Motor SkepticismDocument2 pagesOrgone Motor SkepticismoyomiNo ratings yet
- PIP STS02380, Application of ACI336.1-01 Specification For The Construction of Drilled PiersDocument9 pagesPIP STS02380, Application of ACI336.1-01 Specification For The Construction of Drilled PiersErik PerezNo ratings yet
- Ignition HMI To SLC Through ANC-100e or ANC-120eDocument6 pagesIgnition HMI To SLC Through ANC-100e or ANC-120eJonathanNo ratings yet
- Cse314 Advanced-computer-Architecture TH 1.10 Ac26Document2 pagesCse314 Advanced-computer-Architecture TH 1.10 Ac26netgalaxy2010No ratings yet
- Diseño y Calculo de Valvulas MariposaDocument2 pagesDiseño y Calculo de Valvulas MariposaKilo AsaelNo ratings yet
- Quick Reference AmadeusDocument45 pagesQuick Reference AmadeusHugo BadilloNo ratings yet
- Evaluation and Analysis of Soil Stabilization With Some Non Conventional Additives IJERTV9IS070265Document8 pagesEvaluation and Analysis of Soil Stabilization With Some Non Conventional Additives IJERTV9IS070265slv buildersNo ratings yet
- Man 031956 Dionex Suppressors Man031956 enDocument92 pagesMan 031956 Dionex Suppressors Man031956 enMiguelNo ratings yet
- Pipe Design Calculations Asme B31 3Document1 pagePipe Design Calculations Asme B31 3rocap76046No ratings yet
- Production of Acrylonitrile (ANKB40303Document75 pagesProduction of Acrylonitrile (ANKB40303NUR AKMAL HISHAMNo ratings yet
- Project Pegasus Andy Contextualizes Contemporary Time Travel Research 3-18-10Document2 pagesProject Pegasus Andy Contextualizes Contemporary Time Travel Research 3-18-10Lawrence JonesNo ratings yet
- IIIE Student Project Reports Covering Quality, Lean, Automation & MoreDocument17 pagesIIIE Student Project Reports Covering Quality, Lean, Automation & MoreSwarup mishraNo ratings yet
- Unlock The Rest of Learning Java, 4th Videos: Edition and 30,000 Other Books andDocument8 pagesUnlock The Rest of Learning Java, 4th Videos: Edition and 30,000 Other Books andRennyDortaNo ratings yet
- Borkheda SodalpurDocument8 pagesBorkheda Sodalpurkaran ahariNo ratings yet
- Modeling Biologics, Antibodies & ProteinsDocument2 pagesModeling Biologics, Antibodies & Proteinsthamizh555No ratings yet
- En Iso 13919-1 - 1996Document9 pagesEn Iso 13919-1 - 1996MNo ratings yet
- Lecture5 PDFDocument3 pagesLecture5 PDFLionell FurtadoNo ratings yet
- Polymer IntroDocument15 pagesPolymer IntroYUG PRATAP SINGHNo ratings yet