You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SadasfDocument2 pagesSadasfBaoLCNo ratings yet
- GNGHMHGMDocument2 pagesGNGHMHGMBaoLCNo ratings yet
- Ex-Magazine 2005: Figure 1: Assessment of Hazardous Areas in The Russian FederationDocument1 pageEx-Magazine 2005: Figure 1: Assessment of Hazardous Areas in The Russian FederationBaoLCNo ratings yet
- ÁdasfbfdbDocument4 pagesÁdasfbfdbBaoLCNo ratings yet
- Converting Substrings To Numerical Values: Error Conditions That Set ENO 0Document1 pageConverting Substrings To Numerical Values: Error Conditions That Set ENO 0BaoLCNo ratings yet
- Defining Counter Modes and InputsDocument1 pageDefining Counter Modes and InputsBaoLCNo ratings yet
- ÁdasdasdDocument4 pagesÁdasdasdBaoLCNo ratings yet
- DFHDFHDocument1 pageDFHDFHBaoLCNo ratings yet
- Stainless Steel ATEX High Temperature HubsDocument1 pageStainless Steel ATEX High Temperature HubsBaoLCNo ratings yet
- GOST R 51330.5-99 Ignition Temperature Requirements Applicable To Ex I CircuitsDocument1 pageGOST R 51330.5-99 Ignition Temperature Requirements Applicable To Ex I CircuitsBaoLCNo ratings yet
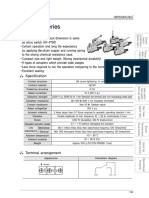
- ZCN-500 Series: Limit SwitchDocument1 pageZCN-500 Series: Limit SwitchBaoLCNo ratings yet
- 1641 Pipelines 2014: From Underground To The Forefront of Innovation and Sustainability © ASCE 2014Document1 page1641 Pipelines 2014: From Underground To The Forefront of Innovation and Sustainability © ASCE 2014BaoLCNo ratings yet
- The Industrial Range Offers Numerous Ádqjhfrpelqdwlrqv: Type A 22C 04 - For General PurposeDocument1 pageThe Industrial Range Offers Numerous Ádqjhfrpelqdwlrqv: Type A 22C 04 - For General PurposeBaoLCNo ratings yet
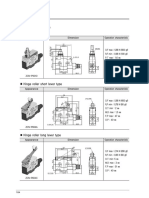
- Dimension: L Liim Miitt SSW Wiittc CH H // M Miic Crro o SSW Wiittc CH HDocument2 pagesDimension: L Liim Miitt SSW Wiittc CH H // M Miic Crro o SSW Wiittc CH HBaoLCNo ratings yet
- The Most Significant Deviations in Russian Standards From Existing International Standards GOST R 51330.0-99: General RequirementsDocument1 pageThe Most Significant Deviations in Russian Standards From Existing International Standards GOST R 51330.0-99: General RequirementsBaoLCNo ratings yet
- Pressure Safety ValveDocument1 pagePressure Safety ValveBaoLCNo ratings yet
- Gasket-Related Installation IssuesDocument1 pageGasket-Related Installation IssuesBaoLCNo ratings yet
- 11.4 Overcurrent Protection: LZ - inDocument1 page11.4 Overcurrent Protection: LZ - inBaoLCNo ratings yet
- 364 Parallel Operation: Compressor Manual 300 Reciprocating CompressorsDocument1 page364 Parallel Operation: Compressor Manual 300 Reciprocating CompressorsBaoLCNo ratings yet
- Compressed Air & Gas Data: 300 Reciprocating Compressors Compressor ManualDocument1 pageCompressed Air & Gas Data: 300 Reciprocating Compressors Compressor ManualBaoLCNo ratings yet
- (Figure 44.2 of BS 7671) Tolerable Fault 1 100 Voltage Due To An Earth L 000 Fault in The HV System 90oDocument1 page(Figure 44.2 of BS 7671) Tolerable Fault 1 100 Voltage Due To An Earth L 000 Fault in The HV System 90oBaoLCNo ratings yet
- 363 Capacity Control: 300 Reciprocating Compressors Compressor ManualDocument1 page363 Capacity Control: 300 Reciprocating Compressors Compressor ManualBaoLCNo ratings yet
- Reduced Section Protective Conductors: Ztest Z4i/C R 1 .4 4 /1 .2 1 .2 0Document1 pageReduced Section Protective Conductors: Ztest Z4i/C R 1 .4 4 /1 .2 1 .2 0BaoLCNo ratings yet
- 9.3.2 Earth Fault Loop Impedance Corrections For TemperatureDocument1 page9.3.2 Earth Fault Loop Impedance Corrections For TemperatureBaoLCNo ratings yet