You might also like
- Elements of Electromagnetics 7th Edition - SOLUTION MANUAL - Matthew SadikuDocument513 pagesElements of Electromagnetics 7th Edition - SOLUTION MANUAL - Matthew Sadikukarla67% (9)
- 嘉力缸盖产品目录 中文Document38 pages嘉力缸盖产品目录 中文Marco WeiNo ratings yet
- 自控II作业002 答案Document3 pages自控II作业002 答案2h94zk6gd8No ratings yet
- Leccion 2 CVDocument3 pagesLeccion 2 CVdanilo proNo ratings yet
- Gabarito Lista Cap3Document3 pagesGabarito Lista Cap3Mateus FlausinoNo ratings yet
- 常用傅里叶变换对Document4 pages常用傅里叶变换对sygougouNo ratings yet
- NEET UG Physics Gravitation Final-1Document86 pagesNEET UG Physics Gravitation Final-1Apeksha MudagiNo ratings yet
- 51 Vehicle Condition ReportDocument2 pages51 Vehicle Condition ReportANGGIE DEWINo ratings yet
- Serie 3Document8 pagesSerie 3Buke24No ratings yet
- Modul 15 - Sistem Pemrosesan SinyalDocument35 pagesModul 15 - Sistem Pemrosesan SinyalARDIAN SRIYONO 53119036No ratings yet
- EXP05 轉動Document13 pagesEXP05 轉動QianNo ratings yet
- Vježbe - 1Document15 pagesVježbe - 1Monika RadovicNo ratings yet
- FH100E Parts BookDocument308 pagesFH100E Parts BookReksi AnggaraNo ratings yet
- Obj 3 Main TablDocument14 pagesObj 3 Main Tablhuat huatNo ratings yet
- Catálogo Corrigido RV3Document383 pagesCatálogo Corrigido RV3Diego SouzaNo ratings yet
- NEET UG Physics Surface-Tension-Viscosity Final-1Document82 pagesNEET UG Physics Surface-Tension-Viscosity Final-1Midhun Bhuvanesh B RWSNo ratings yet
- Skema Matematik Tambahan K2 Trial Batu Pahat 2019 PDFDocument11 pagesSkema Matematik Tambahan K2 Trial Batu Pahat 2019 PDFkirin19No ratings yet
- 885Document14 pages885北科大-劉千榮No ratings yet
- Chapter 8Document56 pagesChapter 8xup6u3qo4No ratings yet
- 050第五章时域离散系统的基本网络结构习题Document13 pages050第五章时域离散系统的基本网络结构习题张浩象No ratings yet
- LEM78P153_ELANMicroelectronicsCorpDocument19 pagesLEM78P153_ELANMicroelectronicsCorpstryker strykerNo ratings yet
- 05第五章时域离散系统的基本网络结构习题Document13 pages05第五章时域离散系统的基本网络结构习题张浩象No ratings yet
- 概率论习题答案Document7 pages概率论习题答案John SmithNo ratings yet
- Study guide 2 Post-test SolutionsDocument23 pagesStudy guide 2 Post-test Solutionstrader.kingNo ratings yet
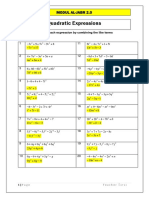
- MODUL AL-JABR 2.0-AnswerDocument11 pagesMODUL AL-JABR 2.0-AnswerFaizah AlmuhsinNo ratings yet
- Trigonometry DPP-1Document2 pagesTrigonometry DPP-1Shreyansh Singh ShekhawatNo ratings yet
- Clase 02-09-2022 - 063614Document5 pagesClase 02-09-2022 - 063614Charles MoralesNo ratings yet
- 10 數位控制系統 PDFDocument25 pages10 數位控制系統 PDF何家銘No ratings yet
- BOM For WangguanDocument2 pagesBOM For WangguancuserNo ratings yet
- Ebook Mat100 OutubroDocument46 pagesEbook Mat100 OutubroOrlando FirmezaNo ratings yet
- Gombelemek MereteiDocument2 pagesGombelemek MereteiSteve HunterNo ratings yet
- TM1629D EtcDocument20 pagesTM1629D EtcRemigild PeterNo ratings yet
- 111分科測驗數學甲模擬試題卷 (二) 題目&解析Document9 pages111分科測驗數學甲模擬試題卷 (二) 題目&解析小晴No ratings yet
- 高二自主學習成果Document13 pages高二自主學習成果李軒No ratings yet
- ZP375 AaaaDocument10 pagesZP375 AaaasergioNo ratings yet
- Planilha Carga Plano de ControleDocument5 pagesPlanilha Carga Plano de ControleLuciano GlauberNo ratings yet
- 轴结构改错Document15 pages轴结构改错Bau2NineNo ratings yet
- 複分析五講 第五講 微 分 幾何與 Picard 定理 ·: 5.1. 度量與曲率 (metric and curvature)Document25 pages複分析五講 第五講 微 分 幾何與 Picard 定理 ·: 5.1. 度量與曲率 (metric and curvature)nx deNo ratings yet
- فرض محروس رقم 2 التجاذب الكوني ، الحركة، التأثيرات الميكانيكية، تقنيات استخراج الأنواع الكيميائيDocument3 pagesفرض محروس رقم 2 التجاذب الكوني ، الحركة، التأثيرات الميكانيكية، تقنيات استخراج الأنواع الكيميائيe.maskarNo ratings yet
- Tableau zDocument1 pageTableau zDocdiarrassouba8834No ratings yet
- FARE Matrix Comparisons Data1Document497 pagesFARE Matrix Comparisons Data1Dragan PamučarNo ratings yet
- CHP 11 Level-1 Set-01 Exe Ques Ans Eng Balancing Equation and Ionic Equation (Updated LKC2 4-8-2021)Document2 pagesCHP 11 Level-1 Set-01 Exe Ques Ans Eng Balancing Equation and Ionic Equation (Updated LKC2 4-8-2021)hanhanhanhanhan hanNo ratings yet
- LPSE Kabupaten Bojonegoro - (LPSE) Undangan Pembuktian KualifikasiDocument2 pagesLPSE Kabupaten Bojonegoro - (LPSE) Undangan Pembuktian Kualifikasiardhisa narawitaNo ratings yet
- Tut 2 AnsDocument30 pagesTut 2 Ans新山宽中时事校队No ratings yet
- 指数函数与对数函数Document2 pages指数函数与对数函数Tan Ying ShuangNo ratings yet
- 人工智能技术:第一章 搜索Document91 pages人工智能技术:第一章 搜索liuxing041016No ratings yet
- Gauss SeidelDocument26 pagesGauss SeidelCalebe CostaNo ratings yet
- Ecuaciones PolaresDocument3 pagesEcuaciones PolaresKeysi Naomy Caycho-MartelNo ratings yet
- LPSE Kabupaten Kutai Kartanegara - (LPSE) Pemberitahuan Negosiasi Tender_Seleksi (1)Document2 pagesLPSE Kabupaten Kutai Kartanegara - (LPSE) Pemberitahuan Negosiasi Tender_Seleksi (1)videamandirismdNo ratings yet
- 303停電事故檢討報告Document34 pages303停電事故檢討報告417095906No ratings yet
- 第06章 卡方检验Document48 pages第06章 卡方检验黄宇No ratings yet
- ÁNHDocument7 pagesÁNHNguyễn Nguyệt ÁnhNo ratings yet
- 1 Catalogue For CD & MD Electric Wire Rope Hoist DGCRANEDocument17 pages1 Catalogue For CD & MD Electric Wire Rope Hoist DGCRANEMadusha Tissera100% (1)
- The Last of The Mohicans #3 - Marvel Comics (2007)Document29 pagesThe Last of The Mohicans #3 - Marvel Comics (2007)Gary TanNo ratings yet
- Fittings 1Document1 pageFittings 1htoomyat.chrisNo ratings yet
- 实验箱上的器件及管脚分配Document2 pages实验箱上的器件及管脚分配陈希文No ratings yet