You might also like
- SCE K Controller Manual R1 PDFDocument120 pagesSCE K Controller Manual R1 PDF이태수No ratings yet
- Gp2y0e02 03 Appl eDocument38 pagesGp2y0e02 03 Appl ezakreaNo ratings yet
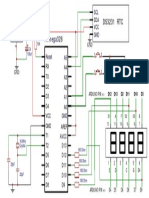
- Atmega328: Ds3231 RTCDocument1 pageAtmega328: Ds3231 RTCTala GeminisNo ratings yet
- VS (Ver 4.3) (041-060)Document20 pagesVS (Ver 4.3) (041-060)NikoNo ratings yet
- Esp32 Wroom Wifi Devkit v1 - PinoutDocument1 pageEsp32 Wroom Wifi Devkit v1 - Pinout20JTD2BTasya Rahma FNo ratings yet
- Cmos 혼성모드시스템설계 AdcDocument222 pagesCmos 혼성모드시스템설계 Adclimsiro01No ratings yet
- Vse002 05 - Ko KRDocument3 pagesVse002 05 - Ko KRkoths202010807No ratings yet
- MD κ¿Çà ÆûÅë Å Ç Ç V16Document35 pagesMD κ¿Çà ÆûÅë Å Ç Ç V16Sơn Nguyễn VănNo ratings yet
- Sconi 2250 ADocument2 pagesSconi 2250 A반기서No ratings yet
- LQ084S3LG03 01jan14 Spec LD-23602CDocument21 pagesLQ084S3LG03 01jan14 Spec LD-23602CdavidNo ratings yet
- (datasheet) 자이로가속도센서 P0-AGD-16-01 - Manual - v0.1Document7 pages(datasheet) 자이로가속도센서 P0-AGD-16-01 - Manual - v0.1jae hak kimNo ratings yet
- Schematic - Timbre Inteligente - 2023-04-18Document1 pageSchematic - Timbre Inteligente - 2023-04-18Hector de leonNo ratings yet
- COMMANDER사용설명서v1 0Document8 pagesCOMMANDER사용설명서v1 0조현의No ratings yet
- Ultrasonic Module For Mini RADARDocument1 pageUltrasonic Module For Mini RADARBharath kumarNo ratings yet
- MRT-Duino (20170603) 교재Document95 pagesMRT-Duino (20170603) 교재birrusatuNo ratings yet
- Servo MotorDocument1 pageServo Motorcomplulu23No ratings yet
- MDA7000 Catalogue (국문)Document5 pagesMDA7000 Catalogue (국문)Esau HernandezNo ratings yet
- Sce 032 500 Analog Values s7 1500 r1703 KRDocument39 pagesSce 032 500 Analog Values s7 1500 r1703 KRsklee0730No ratings yet
- Schematic MulttimeterDocument1 pageSchematic MulttimeterSELF SEEKERNo ratings yet
- VS (Ver 4.3) (021-040)Document20 pagesVS (Ver 4.3) (021-040)NikoNo ratings yet
- Kepler UserManualDocument105 pagesKepler UserManual주씨No ratings yet
- OLP Project TutorialDocument8 pagesOLP Project TutorialMD. SHEFAUL KARIMNo ratings yet
- Khoi Dieu Khien Khoi Nut Bam Khoi Cam Bien Khoi NguonDocument1 pageKhoi Dieu Khien Khoi Nut Bam Khoi Cam Bien Khoi NguonĐông Kiều DuyNo ratings yet
- 오토닉스 I.O 연결 케이블 .CJ 시리즈Document87 pages오토닉스 I.O 연결 케이블 .CJ 시리즈rihl205No ratings yet
- MACH-PP3 사용설명서Document5 pagesMACH-PP3 사용설명서조현의No ratings yet
- (Adc) Cmos혼성모드 시스템 설계 및 실습Document219 pages(Adc) Cmos혼성모드 시스템 설계 및 실습limsiro01No ratings yet
- Smart Garage DoorDocument1 pageSmart Garage DoorSachin ISE-2020-24No ratings yet
- Cinta TransportadoraDocument1 pageCinta TransportadorachinchulandiagonzNo ratings yet
- TEMI1000 Comm (Kor)Document64 pagesTEMI1000 Comm (Kor)Sangyoul LeeNo ratings yet
- Kepler UserManualDocument76 pagesKepler UserManual주씨No ratings yet
- E50S Cat Kor 160408Document3 pagesE50S Cat Kor 160408머신비전No ratings yet
- Surprising HangoDocument1 pageSurprising HangoORG Da VinesNo ratings yet
- Dplc-485hca RS485Document2 pagesDplc-485hca RS485cesare.alcesteNo ratings yet
- ## 중급6편 학습교재 - 스마트팜 - 식물물주기Document24 pages## 중급6편 학습교재 - 스마트팜 - 식물물주기6251920No ratings yet
- 차선이탈경보장치의 Emc 대책Document31 pages차선이탈경보장치의 Emc 대책최창민No ratings yet
- 아두이노 실습Document36 pages아두이노 실습양찬우No ratings yet
- 부품목록Document3 pages부품목록originalappleNo ratings yet
- MT4Y W Cat KR 1505221Document10 pagesMT4Y W Cat KR 1505221최경현No ratings yet
- motrex, 폭스바겐Document47 pagesmotrex, 폭스바겐gilljung730No ratings yet
- Plànol Electrònic Braç RobòticDocument1 pagePlànol Electrònic Braç RobòticQuim Vilà RosetNo ratings yet
- Brave Amur-WaasaDocument1 pageBrave Amur-WaasaIyot TNo ratings yet
- Arduino Smart CarDocument135 pagesArduino Smart Car권형진No ratings yet
- MAC3 Instruction ManualDocument21 pagesMAC3 Instruction ManualMartin Alejandro Rangel ValdezNo ratings yet
- Ver Drah Tung S PlanDocument1 pageVer Drah Tung S Plannoahschmidtke23No ratings yet
- Cid Cat KR 150803Document2 pagesCid Cat KR 150803머신비전No ratings yet
- cpbox설치 보수 매뉴얼 plc타입Document31 pagescpbox설치 보수 매뉴얼 plc타입kim minNo ratings yet
- MS Servo PDFDocument29 pagesMS Servo PDFdae hee hanNo ratings yet
- Avr Lecture3Document15 pagesAvr Lecture3api-3825669No ratings yet
- Technical Description Cat Kor 160704Document6 pagesTechnical Description Cat Kor 160704머신비전No ratings yet
- 03 - 액정 디스플레이 모듈의 하드웨어Document7 pages03 - 액정 디스플레이 모듈의 하드웨어K SiriusNo ratings yet
- SSR 바이드뮬러 8950720000 기술자료집KODocument5 pagesSSR 바이드뮬러 8950720000 기술자료집KOJUNGNo ratings yet
- Servo Motor PotensioDocument1 pageServo Motor PotensioI Am ByeBlogsNo ratings yet
- SERVOMOTORDocument1 pageSERVOMOTOREdgar Vega AragónNo ratings yet
- Schematic MQ+02 2023-09-21Document1 pageSchematic MQ+02 2023-09-2120WH1A04A6 YALAGAM SUPRIYANo ratings yet
- IoT - 2주차 (IoT System, IDE설치,기본설정,WiFi Scan) - v1.0Document17 pagesIoT - 2주차 (IoT System, IDE설치,기본설정,WiFi Scan) - v1.0jonginchoi99No ratings yet
- VerdrahtungsplanDocument1 pageVerdrahtungsplannoahschmidtke23No ratings yet
- Automatic DoorDocument1 pageAutomatic DoormrunalaralkarNo ratings yet
- 지멘스-Sinamics한글 - manual 2Document31 pages지멘스-Sinamics한글 - manual 2우럭No ratings yet
- Si4100 ManualDocument59 pagesSi4100 ManualFawzi AlzubairyNo ratings yet
- Lecture10 동역학 StudentVersionDocument17 pagesLecture10 동역학 StudentVersionLong PhamNo ratings yet
- Lecture13 동역학 StudentVersionDocument20 pagesLecture13 동역학 StudentVersionLong PhamNo ratings yet
- R00 길라잡이0장 회로Document4 pagesR00 길라잡이0장 회로Long PhamNo ratings yet
- Lecture11 동역학 StudentVersionDocument7 pagesLecture11 동역학 StudentVersionLong PhamNo ratings yet
- 2주차 (Sketcher)Document22 pages2주차 (Sketcher)Long PhamNo ratings yet
- Data 23894524Document2 pagesData 23894524Long PhamNo ratings yet
- LM1501020106 체결요소설계Document76 pagesLM1501020106 체결요소설계Long PhamNo ratings yet
- Lecture1 동역학 StudentVersionDocument16 pagesLecture1 동역학 StudentVersionLong PhamNo ratings yet
- 2주차 탄수화물^J지방^J단백질Document50 pages2주차 탄수화물^J지방^J단백질Long PhamNo ratings yet
- 1주차 - 식품과 건강Document31 pages1주차 - 식품과 건강Long PhamNo ratings yet
- 3주차 - 비타민 무기질 물Document114 pages3주차 - 비타민 무기질 물Long PhamNo ratings yet