You might also like
- Fazail e Amaal - Complete PDFDocument964 pagesFazail e Amaal - Complete PDFfayazmd8384% (37)
- Portable Programming Device by Salto: RW PPDDocument16 pagesPortable Programming Device by Salto: RW PPDUsman MarajNo ratings yet
- BFDX Walkie Talkie Radios BF-350 USER'S MANUAL PDFDocument10 pagesBFDX Walkie Talkie Radios BF-350 USER'S MANUAL PDFtracy lin100% (1)
- Stick Logger LSG-3 User ManualDocument13 pagesStick Logger LSG-3 User ManualjoseNo ratings yet
- Manual Testing Help Ebook by Software Testing HelpDocument22 pagesManual Testing Help Ebook by Software Testing Helpvarshash24No ratings yet
- Manual Testing Help Ebook by Software Testing HelpDocument22 pagesManual Testing Help Ebook by Software Testing Helpvarshash24No ratings yet
- The Highway Code Road Markings PDFDocument3 pagesThe Highway Code Road Markings PDFcool_cake20No ratings yet
- ESPKey Tool Manual v1.0.0Document36 pagesESPKey Tool Manual v1.0.0Jad HaddadNo ratings yet
- Dragon Link V2Document21 pagesDragon Link V2highoctane2005No ratings yet
- X-Tra Talk LXT360 SeriesDocument16 pagesX-Tra Talk LXT360 SeriesMonicaNo ratings yet
- TX12 Quick Start GuideDocument10 pagesTX12 Quick Start Guideawi2510No ratings yet
- OptimDocument10 pagesOptimPablo GomsaNo ratings yet
- Product IntroductionDocument6 pagesProduct Introductionwdr4322350No ratings yet
- Lite Radio 2 SE-User Manual-NewDocument16 pagesLite Radio 2 SE-User Manual-NewAbdul AzizNo ratings yet
- QP-350 Service Manual-E-V1.0BDocument49 pagesQP-350 Service Manual-E-V1.0BAdrian AbarcaNo ratings yet
- The T.Racks: Digital Speaker Processor Model Ds2/4Document11 pagesThe T.Racks: Digital Speaker Processor Model Ds2/4Maxime SorelNo ratings yet
- Hobbyking Radio Hk-7x v2Document11 pagesHobbyking Radio Hk-7x v2patrickbogueNo ratings yet
- Skydroid H12/H12Prouser Manual V1.0Document9 pagesSkydroid H12/H12Prouser Manual V1.0Asdrubal OperacionesNo ratings yet
- Amiko Quick Start GuideDocument11 pagesAmiko Quick Start GuidePero PericNo ratings yet
- RD11 Inst Book4Document4 pagesRD11 Inst Book4AitorNo ratings yet
- LXT376/440 Series: GMRS/FRS RadioDocument24 pagesLXT376/440 Series: GMRS/FRS RadioPayphone.comNo ratings yet
- LXT276/330/335 Series: GMRS/FRS RadioDocument20 pagesLXT276/330/335 Series: GMRS/FRS RadioPayphone.com100% (1)
- 18X3W Wireless 3 in 1 LED Flat Par Light: 1. InstructionDocument9 pages18X3W Wireless 3 in 1 LED Flat Par Light: 1. InstructionHerman KeyzhaNo ratings yet
- Manual de Servicio TC-580Document70 pagesManual de Servicio TC-580Sonny RamirezNo ratings yet
- Midland LXT 480 Radio User ManualDocument20 pagesMidland LXT 480 Radio User ManualMaarten van RooijNo ratings yet
- LiteRadio 3-User ManualDocument16 pagesLiteRadio 3-User ManualGerardo QuintanarNo ratings yet
- Cd34install EnglishDocument24 pagesCd34install EnglishZoltán VéberNo ratings yet
- Direct Debit Formulary 2Document16 pagesDirect Debit Formulary 2ruimiguelsenaNo ratings yet
- DMC16-1 6Document13 pagesDMC16-1 6nosnomaNo ratings yet
- Dragon LinkV2 Instructions Plus FAQ Edit 1Document5 pagesDragon LinkV2 Instructions Plus FAQ Edit 1leo baruaNo ratings yet
- DatasheetDocument16 pagesDatasheetluis figuerasNo ratings yet
- NEO Coolcam - Wall PlugDocument10 pagesNEO Coolcam - Wall Plugatianna.paschalNo ratings yet
- Relay TBP12 Transmitter Pilot's Guide - English (Rev J)Document7 pagesRelay TBP12 Transmitter Pilot's Guide - English (Rev J)Keerati KittipadungkulNo ratings yet
- NUX MG-30 Versatile Modeler User Manual: Manuals+Document11 pagesNUX MG-30 Versatile Modeler User Manual: Manuals+JasperMelNo ratings yet
- Manual Ws 6933Document14 pagesManual Ws 6933Michell Lopes BarbosaNo ratings yet
- Dts Eco 500: Sliding Gate Motor Installation ManualDocument8 pagesDts Eco 500: Sliding Gate Motor Installation ManualFrancois VaaltynNo ratings yet
- RSPD3303C: Quick StartDocument31 pagesRSPD3303C: Quick StartGuillaume FoubertNo ratings yet
- PAR 56 DMX - User GuideDocument13 pagesPAR 56 DMX - User GuideMac McKieNo ratings yet
- SATLINK WS-6933 사용설명서 영문Document14 pagesSATLINK WS-6933 사용설명서 영문Kosi deekporNo ratings yet
- T50-Owners-Manual-Rev-C 1Document20 pagesT50-Owners-Manual-Rev-C 1Nico VasquezNo ratings yet
- Debug Guide Level 3/4 PropietaryDocument10 pagesDebug Guide Level 3/4 PropietaryGutz Teo ManuelNo ratings yet
- Transmitter: Quick-Start GuideDocument6 pagesTransmitter: Quick-Start Guidefilomena leonardoNo ratings yet
- SRT 4669XII - CONAX - MPEG 4 - DVR - Manual - English For Middle East & AfricaDocument29 pagesSRT 4669XII - CONAX - MPEG 4 - DVR - Manual - English For Middle East & AfricaEugene Addo0% (2)
- T16 User ManualDocument9 pagesT16 User ManualHariz MonkzNo ratings yet
- Dts Eco 500: Sliding Gate Motor Installation ManualDocument8 pagesDts Eco 500: Sliding Gate Motor Installation ManualFrancois VaaltynNo ratings yet
- D8R-II PlusDocument2 pagesD8R-II PlusNatxo VaronaNo ratings yet
- TC-320 Service Manual NEW (RoHS)Document77 pagesTC-320 Service Manual NEW (RoHS)Lorenzo GarciaNo ratings yet
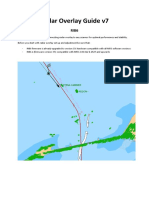
- Radar Overlay Guide v7Document18 pagesRadar Overlay Guide v7Pako AlbNo ratings yet
- RD7000 User GuideDocument18 pagesRD7000 User GuideZaimi ZamaludinNo ratings yet
- RangeLink UHF LRS Manual v1.3Document17 pagesRangeLink UHF LRS Manual v1.3lgenniferNo ratings yet
- TX700 - Manual v11Document20 pagesTX700 - Manual v11Eduardo BaltazarNo ratings yet
- Manual Uwe W10Document27 pagesManual Uwe W10michigato100% (1)
- Moxa Nport 6100 6200 Series Qig v11.0Document6 pagesMoxa Nport 6100 6200 Series Qig v11.0ardindavirmanNo ratings yet
- Massachusetts Institute of Technology 2.12 Introduction To RoboticsDocument5 pagesMassachusetts Institute of Technology 2.12 Introduction To RoboticsHenry Lois Davila AndradeNo ratings yet
- 4100 & 2500 Wireless Remote Control ORANGE JoystickDocument19 pages4100 & 2500 Wireless Remote Control ORANGE Joystickpavlestepanic9932No ratings yet
- Lemon RX ManualDocument9 pagesLemon RX ManualzwesleyNo ratings yet
- DR5800-2 ServiceManua01Document61 pagesDR5800-2 ServiceManua01Daniel Fernando Sotelo LagosNo ratings yet
- Integra RDA7 PwrampDocument28 pagesIntegra RDA7 PwrampturucNo ratings yet
- Modulo FRSky FutabaFM para 2 4Document2 pagesModulo FRSky FutabaFM para 2 4AltemarFernandesdeOliveiraNo ratings yet
- Seven Channel AmpliDocument28 pagesSeven Channel AmpliturucNo ratings yet
- Ultrascan Hanatech PDFDocument12 pagesUltrascan Hanatech PDFPhilip ManriqueNo ratings yet
- MT-7025 Network Tone & Probe Kit: User's ManualDocument24 pagesMT-7025 Network Tone & Probe Kit: User's Manual余日中No ratings yet
- Radio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142From EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142No ratings yet
- Delco Manuals: Radio Model 633, Delcotron Generator Delco Radio Owner's Manual Model 633, Delcotron Generator InstallationFrom EverandDelco Manuals: Radio Model 633, Delcotron Generator Delco Radio Owner's Manual Model 633, Delcotron Generator InstallationNo ratings yet
- Digital LED Thermometer with Microcontroller AVR ATtiny13From EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Rating: 5 out of 5 stars5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Flying Wing INAV Tips For DummiesDocument4 pagesFlying Wing INAV Tips For Dummiesfayazmd83No ratings yet
- EggPlant Release NotesDocument107 pagesEggPlant Release Notesfayazmd83No ratings yet
- Swimming 56757dde86541Document92 pagesSwimming 56757dde86541James WigtonNo ratings yet
- Adult Fares PDFDocument2 pagesAdult Fares PDFChairimanNo ratings yet
- Morning & Evening DuasDocument21 pagesMorning & Evening Duasapi-19966677No ratings yet
- Stories of The SahabahDocument136 pagesStories of The Sahabahafzal88100% (2)
- Software Testing TutorialDocument11 pagesSoftware Testing TutorialAnusha ReddyNo ratings yet
- Swimming 56757dde86541Document92 pagesSwimming 56757dde86541James WigtonNo ratings yet
- Software Testing TutorialDocument11 pagesSoftware Testing TutorialAnusha ReddyNo ratings yet
- Software Testing TutorialDocument11 pagesSoftware Testing TutorialAnusha ReddyNo ratings yet
- Formal Presentation Evaluation FormDocument1 pageFormal Presentation Evaluation Formfayazmd83No ratings yet
- Smart BDD Testing Using Cucumber and JacocoDocument9 pagesSmart BDD Testing Using Cucumber and Jacocofayazmd83No ratings yet
- London Standard Tube MapDocument2 pagesLondon Standard Tube MapamakarNo ratings yet
- Mobile Android Module For LearningDocument5 pagesMobile Android Module For Learningfayazmd83No ratings yet
- CZ-300 User Manual - en - V1.3Document30 pagesCZ-300 User Manual - en - V1.3QwertyjNo ratings yet
- mr60 ManualDocument25 pagesmr60 ManualBipul PoudelNo ratings yet
- Datalogic™ OPOS Service Objects: User ManualDocument50 pagesDatalogic™ OPOS Service Objects: User ManualJonathan AguirreNo ratings yet
- How To Update Samsung Galaxy S Any Call (SHW-M110S) To GDocument9 pagesHow To Update Samsung Galaxy S Any Call (SHW-M110S) To GS M Sumsul IslamNo ratings yet
- How To Hack Directv Satellite H and Hu CardsDocument8 pagesHow To Hack Directv Satellite H and Hu Cardsriadelectro100% (1)
- YAMAHA THR-II Series Update Manual: Special NoticesDocument10 pagesYAMAHA THR-II Series Update Manual: Special NoticeshudsonmansonNo ratings yet
- Release NotespdfDocument3 pagesRelease NotespdfRogin Dave SerranoNo ratings yet
- Bigtreetech GTR V1.0 Operating InstructionDocument23 pagesBigtreetech GTR V1.0 Operating InstructionGielNo ratings yet
- CIS 110 Chapter 14: Chapter 14 Components of The System UnitDocument3 pagesCIS 110 Chapter 14: Chapter 14 Components of The System UnitRicky Kwan Ki KwokNo ratings yet
- I15i15 VET Upgrade InstructionDocument14 pagesI15i15 VET Upgrade InstructionosamaNo ratings yet
- EX2441-03 - FG300C - Rework - Instruction PDFDocument5 pagesEX2441-03 - FG300C - Rework - Instruction PDFognarfNo ratings yet
- Esaote Caris 7200 Service Manual7200s01cDocument4 pagesEsaote Caris 7200 Service Manual7200s01cAnonymous t1FCvPRSa100% (1)
- Telemetry Troubleshoot GuideDocument21 pagesTelemetry Troubleshoot GuideDenis LisboaNo ratings yet
- An Introduction To Control Network PDFDocument44 pagesAn Introduction To Control Network PDFsipteckNo ratings yet
- Ah en TP (G) XXXSXX Hmi Firmware Upgrade 107453 en 00Document5 pagesAh en TP (G) XXXSXX Hmi Firmware Upgrade 107453 en 00Mario MorenoNo ratings yet
- Version InfoDocument6 pagesVersion InfoguillermoNo ratings yet
- BA63 USB Display Operating Manual EnglishDocument28 pagesBA63 USB Display Operating Manual Englishtenache67No ratings yet
- Centralizable Traffic Controller: General Characteristics Main FunctionsDocument3 pagesCentralizable Traffic Controller: General Characteristics Main FunctionsjackyNo ratings yet
- Wyse USB Firmware Tool v1.8 Users GuideDocument18 pagesWyse USB Firmware Tool v1.8 Users GuideVinicius RodriguesNo ratings yet
- SPC 210 Service TableDocument93 pagesSPC 210 Service TableMohamed Sayed100% (1)
- Cpcam MDR688Z (Avc798z)Document7 pagesCpcam MDR688Z (Avc798z)TecnoSmart0% (1)
- Firmware Enhancements For Pcs Running Windows 7: September 21, 2009Document16 pagesFirmware Enhancements For Pcs Running Windows 7: September 21, 2009mswgtsNo ratings yet
- Ec m2035dn PN m2035dn L m2535dn L Entb1ladr1Document15 pagesEc m2035dn PN m2035dn L m2535dn L Entb1ladr1Luis Santi Herrera SanandresNo ratings yet
- Firmware Manager Guide, Release 1Document7 pagesFirmware Manager Guide, Release 1bouazzamaNo ratings yet
- 8130 RTU Interface AppendixDocument52 pages8130 RTU Interface AppendixАлександрNo ratings yet
- Ir1023 Service GuideDocument29 pagesIr1023 Service GuidejamesNo ratings yet
- Manual TX-SR393 enDocument95 pagesManual TX-SR393 enTempusFugit73No ratings yet