You might also like
- ECE 2026 Lab Spectrograms: Harmonic Lines & AliasingDocument9 pagesECE 2026 Lab Spectrograms: Harmonic Lines & AliasingSilv3r RunescaperNo ratings yet
- ES 442 Homework #2: SolutionsDocument7 pagesES 442 Homework #2: SolutionsTalha Riaz100% (1)
- Unit Iii Frequency ResponseDocument28 pagesUnit Iii Frequency ResponseRaghu RamNo ratings yet
- Understanding Logarithmic Units and Decibel CalculationsDocument9 pagesUnderstanding Logarithmic Units and Decibel CalculationsKamal SinghNo ratings yet
- LAB 1 - Electronics For Transmission SystemsDocument19 pagesLAB 1 - Electronics For Transmission Systemspablo orellanaNo ratings yet
- Digital Signal Processing: Decibels (DB and DBM)Document14 pagesDigital Signal Processing: Decibels (DB and DBM)OSAMANo ratings yet
- 10 1 1 112 2812Document49 pages10 1 1 112 2812Abdulazeez Ayomide AdebimpeNo ratings yet
- Homework Set 10 Solutions EECS 455 Dec. 14, 2006: B o E - 5 B B B P R N P 100 N - 6 - 5 oDocument4 pagesHomework Set 10 Solutions EECS 455 Dec. 14, 2006: B o E - 5 B B B P R N P 100 N - 6 - 5 oof30002000No ratings yet
- Part II - Communication: Problem 1 - Transmission Media (15 Points)Document2 pagesPart II - Communication: Problem 1 - Transmission Media (15 Points)Bogdan BreazuNo ratings yet
- Web For Digital Communication - B.tech 5th SemDocument15 pagesWeb For Digital Communication - B.tech 5th Semkoushikde900% (1)
- ES 442 Homework #2: NAMEDocument8 pagesES 442 Homework #2: NAMEAsadRasheedNo ratings yet
- Design of Digital Filters IIR, Butterworth FilterDocument8 pagesDesign of Digital Filters IIR, Butterworth FilterI am not a proNo ratings yet
- CS - Chapter 6 (Part 2) PDFDocument59 pagesCS - Chapter 6 (Part 2) PDFYuukiaNo ratings yet
- Lista de Exercício - Radiação TérmicaDocument6 pagesLista de Exercício - Radiação TérmicaMárleson FerreiraNo ratings yet
- Component - UART V2.50Document11 pagesComponent - UART V2.50ANNAPUREDDY RAVINDER REDDYNo ratings yet
- Pset 1 SolDocument8 pagesPset 1 SolLJOCNo ratings yet
- SatLinkBudgetDocument36 pagesSatLinkBudgetExtreme DaysNo ratings yet
- Prestige Institute of Engineering & Science Indore (M.P.)Document3 pagesPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNo ratings yet
- CTFT, DTFT and DFT: A Practical GuideDocument6 pagesCTFT, DTFT and DFT: A Practical GuideZülal İlayda ÖzcanNo ratings yet
- Progress in Electromagnetics Research, PIER 98, 33-52, 2009Document20 pagesProgress in Electromagnetics Research, PIER 98, 33-52, 2009brij_astraNo ratings yet
- Elen017 ExercisesDocument164 pagesElen017 ExercisesMiguel FerrandoNo ratings yet
- RR210402 Signals - SystemsDocument8 pagesRR210402 Signals - SystemsThanikonda Reddy SreedharNo ratings yet
- Transfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile LabarreDocument4 pagesTransfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile Labarre1balamanianNo ratings yet
- RepositoryDocument17 pagesRepositoryarefinhasib07No ratings yet
- Project Assignment: R. Nassif, ECE Department, AUB EECE 491-691, Digital Signal ProcessingDocument3 pagesProject Assignment: R. Nassif, ECE Department, AUB EECE 491-691, Digital Signal ProcessingHussein BayramNo ratings yet
- X (N) (1,2,1) H (N) (1, - 2,2)Document2 pagesX (N) (1,2,1) H (N) (1, - 2,2)mugaao8No ratings yet
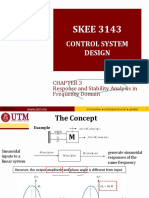
- Response and Stability Analysis in Frequency DomainDocument54 pagesResponse and Stability Analysis in Frequency DomainMYNAMENo ratings yet
- Wavelets (Chapter 7) : CS474/674 - Prof. BebisDocument109 pagesWavelets (Chapter 7) : CS474/674 - Prof. Bebissrc0108No ratings yet
- L5 - Fourier Series (Proposed Exercises)Document3 pagesL5 - Fourier Series (Proposed Exercises)Rodrigo Andres Calderon NaranjoNo ratings yet
- How to Optimize Your Website for Search EnginesDocument17 pagesHow to Optimize Your Website for Search EnginesNano GomeshNo ratings yet
- FALLSEM2021-22 ECE3001 ETH VL2021220101882 Reference Material II 20-09-2021 Module 4.9Document13 pagesFALLSEM2021-22 ECE3001 ETH VL2021220101882 Reference Material II 20-09-2021 Module 4.9Tarun GopalanNo ratings yet
- Chapter 31ADocument43 pagesChapter 31AHafidz HmaNo ratings yet
- Wireles Solution ExercisesDocument22 pagesWireles Solution ExercisesUmair Islam100% (2)
- 7Document2 pages7049 Narendran KNo ratings yet
- Filament Growth Rate Equation for Memristor Device ModelingDocument10 pagesFilament Growth Rate Equation for Memristor Device ModelingTamas ZefferNo ratings yet
- RMIT University: EEET2109 Mid Semester Test Answers (40 CharactersDocument4 pagesRMIT University: EEET2109 Mid Semester Test Answers (40 CharactersCollin lcwNo ratings yet
- B.Tech Analog Communication End Semester Exam QuestionsDocument2 pagesB.Tech Analog Communication End Semester Exam QuestionsDevender DuaNo ratings yet
- Digital Signal Processing AnswersDocument29 pagesDigital Signal Processing Answersmanoojkumar1994No ratings yet
- Frequency ResponseDocument28 pagesFrequency ResponseJalu PrasetyoNo ratings yet
- Digital Signal Processing NotesDocument30 pagesDigital Signal Processing NotesSuraj KumarNo ratings yet
- EEE - 321: Signals and Systems Lab Assignment 1Document7 pagesEEE - 321: Signals and Systems Lab Assignment 1Atakan YiğitNo ratings yet
- Final SolDocument21 pagesFinal SolChuan HeNo ratings yet
- Ece Odd9Document17 pagesEce Odd9Venkat MuruganNo ratings yet
- K22021 XLTH DSP (1) .Algorithms.for.Programmers 171to175 20182737 Nguyễn Hoàng Nhật QuangDocument6 pagesK22021 XLTH DSP (1) .Algorithms.for.Programmers 171to175 20182737 Nguyễn Hoàng Nhật QuangNhật QuangNo ratings yet
- K22021 XLTH DSP (1) .Algorithms.for.Programmers 171to175 20182737 Nguyễn Hoàng Nhật QuangDocument6 pagesK22021 XLTH DSP (1) .Algorithms.for.Programmers 171to175 20182737 Nguyễn Hoàng Nhật QuangNhật QuangNo ratings yet
- EE 515 - CMOS Mixed-Signal IC Design: Time Domain Frequency DomainDocument50 pagesEE 515 - CMOS Mixed-Signal IC Design: Time Domain Frequency DomainWala SaadehNo ratings yet
- Matlab - Practice ProblemsDocument5 pagesMatlab - Practice ProblemsSudeesh SudevanNo ratings yet
- CH - 8 (Bode Plot) PD SolDocument28 pagesCH - 8 (Bode Plot) PD SolAnant SinhaNo ratings yet
- Midterm SolutionDocument4 pagesMidterm SolutionLaszlo KerekesNo ratings yet
- Iitjee Advanced 2016 Question Paper 2 With SolutionsDocument33 pagesIitjee Advanced 2016 Question Paper 2 With SolutionsKleinard Donn FetizananNo ratings yet
- Fundamentals of Multirate Systems in 38 CharactersDocument9 pagesFundamentals of Multirate Systems in 38 CharactersAejaz AamerNo ratings yet
- Communication TutorialDocument17 pagesCommunication Tutorialj0r3lm100% (1)
- Vortrag Da Wu LiangjunDocument33 pagesVortrag Da Wu LiangjunsubuhpramonoNo ratings yet
- Sampling, A/D and D/A Conversion Lab ReportDocument12 pagesSampling, A/D and D/A Conversion Lab ReportJoy BautistaNo ratings yet
- EEE 5502 Code 4: 1 ProblemDocument4 pagesEEE 5502 Code 4: 1 ProblemMichael OlveraNo ratings yet
- Experiment 1: Frequency Modulation and Demodulation AimDocument6 pagesExperiment 1: Frequency Modulation and Demodulation AimGagana PNo ratings yet
- Chapter 21 - Acoustics and Noise ControlDocument4 pagesChapter 21 - Acoustics and Noise ControljovanniNo ratings yet
- Lab ManualsDocument22 pagesLab ManualsHailRodNo ratings yet
- Lecture 4Document13 pagesLecture 4Syed Hussain Akbar MosviNo ratings yet
- State-Space Modeling of Control SystemsDocument11 pagesState-Space Modeling of Control SystemsSyed Hussain Akbar MosviNo ratings yet
- Lecture 1 Engineering ControlDocument13 pagesLecture 1 Engineering ControlSyed Hussain Akbar MosviNo ratings yet
- Lecture 2 Transfer FunctionDocument12 pagesLecture 2 Transfer FunctionSyed Hussain Akbar MosviNo ratings yet
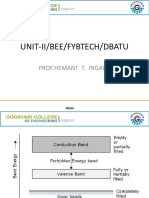
- Bee Unit-IiDocument98 pagesBee Unit-IiHemant Ingale100% (1)
- CV Template DixieDocument3 pagesCV Template DixieDarybelle BusacayNo ratings yet
- Grade7Research 1st Quarter MeasuringDocument17 pagesGrade7Research 1st Quarter Measuringrojen pielagoNo ratings yet
- D Series: Instruction ManualDocument2 pagesD Series: Instruction ManualMartin del ValleNo ratings yet
- For Construction and Industry: Liebherr Diesel EnginesDocument8 pagesFor Construction and Industry: Liebherr Diesel EnginesGoran MatovicNo ratings yet
- KiaOptima Seccion 002Document7 pagesKiaOptima Seccion 002Luis Enrique PeñaNo ratings yet
- Cooler Catalogue PDFDocument12 pagesCooler Catalogue PDFCărunta-Crista CristinaNo ratings yet
- Jhamuna Tower Design DataDocument15 pagesJhamuna Tower Design DataArindam RoyNo ratings yet
- Maths Homework Project Year 4Document8 pagesMaths Homework Project Year 4afeuwbdev100% (1)
- Abaqus 6.12: Abaqus Example Problems ManualDocument606 pagesAbaqus 6.12: Abaqus Example Problems ManualThiago GomesNo ratings yet
- DRAFT RoA (TSBINUANG) TSB 12 PDFDocument1 pageDRAFT RoA (TSBINUANG) TSB 12 PDFAchwan FebNo ratings yet
- Economics Not An Evolutionary ScienceDocument17 pagesEconomics Not An Evolutionary SciencemariorossiNo ratings yet
- Telstra Strategic Issues and CEO Leadership Briefing PaperDocument16 pagesTelstra Strategic Issues and CEO Leadership Briefing PaperIsabel Woods100% (1)
- Creative Commons Attribution-Noncommercial-Share Alike 3.0 LicenseDocument4 pagesCreative Commons Attribution-Noncommercial-Share Alike 3.0 LicenseAnindito W WicaksonoNo ratings yet
- This Content Downloaded From 3.6.73.78 On Wed, 21 Dec 2022 07:40:53 UTCDocument81 pagesThis Content Downloaded From 3.6.73.78 On Wed, 21 Dec 2022 07:40:53 UTCabcdNo ratings yet
- Modified o and G Slides 2Document21 pagesModified o and G Slides 2Salam FaithNo ratings yet
- Memo-on-Orientation and Submission of PNPKIDocument5 pagesMemo-on-Orientation and Submission of PNPKICoronia Mermaly LamsenNo ratings yet
- Mercury MasterDocument18 pagesMercury MastersatishmuggulaNo ratings yet
- Relay: Chapter 1: What Is A Relay?Document19 pagesRelay: Chapter 1: What Is A Relay?Jason SonidoNo ratings yet
- MSC Dissertation Gantt ChartDocument6 pagesMSC Dissertation Gantt ChartProfessionalPaperWritingServiceUK100% (1)
- BrochureDocument2 pagesBrochureNarayanaNo ratings yet
- Analyzing an Anti-Smoking Poster Using a Formalist ApproachDocument20 pagesAnalyzing an Anti-Smoking Poster Using a Formalist ApproachAlphred Jann NaparanNo ratings yet
- Nanowires - Fundamental ResearchDocument564 pagesNanowires - Fundamental ResearchJosé Ramírez100% (1)
- A Fully Coupled 3-D Mixed Finite Element Model of Biot ConsolidationDocument18 pagesA Fully Coupled 3-D Mixed Finite Element Model of Biot ConsolidationTantai RakthaijungNo ratings yet
- Challan FormDocument2 pagesChallan FormSingh KaramvirNo ratings yet
- Work Readiness Integrated Competence Model Conceptualisation and ScaleDocument23 pagesWork Readiness Integrated Competence Model Conceptualisation and ScaleMelly NadiaNo ratings yet
- Vedic Maths - India's Approach To Calculating!Document4 pagesVedic Maths - India's Approach To Calculating!padmanaban_cse100% (2)
- Install and Configure Computer Networks Training Session PlanDocument9 pagesInstall and Configure Computer Networks Training Session PlanMarvin AlcantaraNo ratings yet
- Mitspeck 2014 e VersionDocument130 pagesMitspeck 2014 e VersionVedantDomkondekarNo ratings yet
- LPDocument5 pagesLPHeizyl ann VelascoNo ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsNo ratings yet
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationFrom EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNo ratings yet
- AWS Certified Advanced Networking - Specialty Exam Guide: Build your knowledge and technical expertise as an AWS-certified networking specialistFrom EverandAWS Certified Advanced Networking - Specialty Exam Guide: Build your knowledge and technical expertise as an AWS-certified networking specialistNo ratings yet
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)