You might also like
- 3 Eksen Mach3 Usb CNC Kontrol Kart - AKZ250 v1.17 PDFDocument41 pages3 Eksen Mach3 Usb CNC Kontrol Kart - AKZ250 v1.17 PDFErol KalfaoğluNo ratings yet
- Delphi MT05 Engine Control Module Series: BenefitsDocument2 pagesDelphi MT05 Engine Control Module Series: BenefitsAdrian IvanissevichNo ratings yet
- Tabela de Preços Gladen Mosconi Grupoder 2022Document57 pagesTabela de Preços Gladen Mosconi Grupoder 2022leonardo pintoNo ratings yet
- Audit Trail ReportingDocument43 pagesAudit Trail ReportingNagaraj Gunti100% (1)
- Audi Navigation Plus Installation - Phase 1 (A6/S6/RS6/allroad)Document84 pagesAudi Navigation Plus Installation - Phase 1 (A6/S6/RS6/allroad)Florian LeordeanuNo ratings yet
- Injection and Ignition SystemsDocument18 pagesInjection and Ignition Systems4gen_7No ratings yet
- Power of Character in Leadershi - Myles MunroeDocument208 pagesPower of Character in Leadershi - Myles MunroeEdul Brian100% (1)
- Service Training: Vorsprung Durch Technik WWW - Audi.co - UkDocument56 pagesService Training: Vorsprung Durch Technik WWW - Audi.co - UkAntónio FernandesNo ratings yet
- 2018 Audi q5 2Document392 pages2018 Audi q5 2Garry CattingtonNo ratings yet
- Eur/Usd Cheat SheetDocument5 pagesEur/Usd Cheat SheetEdul BrianNo ratings yet
- Create Your World Interative ST - Patricia KingDocument89 pagesCreate Your World Interative ST - Patricia KingEdul Brian100% (1)
- 41 Programmer Bios Tl866csDocument5 pages41 Programmer Bios Tl866cspeterson_msc5No ratings yet
- Cobb Tuning: Accessport Calibrations Mazdaspeed3Document7 pagesCobb Tuning: Accessport Calibrations Mazdaspeed3zanzer1No ratings yet
- Coding Systems - ASCII and UnicodeDocument23 pagesCoding Systems - ASCII and UnicodeIbrahim AbdulaliNo ratings yet
- Instrument Cluster Description and Operation PDFDocument2 pagesInstrument Cluster Description and Operation PDFAlonso BarrónNo ratings yet
- Audi Bluetooth Adapter 4F0 051 510J InstructionsDocument8 pagesAudi Bluetooth Adapter 4F0 051 510J Instructionssysrq0000No ratings yet
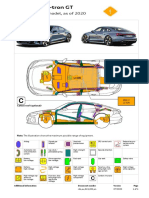
- Audi Rescue Data Sheets (E-Tron GT - Sportback - 2020 - 5d - Electric - EN)Document4 pagesAudi Rescue Data Sheets (E-Tron GT - Sportback - 2020 - 5d - Electric - EN)caragan1970No ratings yet
- VP37 Remap Guide Draft 2Document21 pagesVP37 Remap Guide Draft 2Georgiana MarinNo ratings yet
- English Language Ss1Document7 pagesEnglish Language Ss1Edul BrianNo ratings yet
- Installation Manual b4 Obd Eng OptimizedDocument28 pagesInstallation Manual b4 Obd Eng OptimizedVladislav DichevNo ratings yet
- BOSCH MOTRONIC M5.2.1 - System OverviewDocument17 pagesBOSCH MOTRONIC M5.2.1 - System OverviewArda AkberkNo ratings yet
- Replacement of Parts GantryDocument350 pagesReplacement of Parts GantryJairo Manzaneda100% (1)
- InfoPLC Net EIO0000001762.00 M221 Temperature ControlDocument30 pagesInfoPLC Net EIO0000001762.00 M221 Temperature ControlMateo QuispeNo ratings yet
- VW/Audi 1.8T Transverse (FWD) Ignition Wiring Replacement Kit Installation Guide Skill Level 2 - ModerateDocument21 pagesVW/Audi 1.8T Transverse (FWD) Ignition Wiring Replacement Kit Installation Guide Skill Level 2 - ModerateKushal ExpertNo ratings yet
- Ross-Tech VAG-COM USB Cable Instructions (For Audi Auto Computers)Document3 pagesRoss-Tech VAG-COM USB Cable Instructions (For Audi Auto Computers)urcanfleurNo ratings yet
- Painting Robot ArmDocument65 pagesPainting Robot ArmBrook EshetuNo ratings yet
- 088 - Instrument Panel Center Console Component ViewsDocument8 pages088 - Instrument Panel Center Console Component ViewsGedas GvildysNo ratings yet
- Motronic M2.3 PinoutDocument2 pagesMotronic M2.3 Pinouta1113289No ratings yet
- "LCD Device Driver" For Reconfigurable Instrument ClusterDocument6 pages"LCD Device Driver" For Reconfigurable Instrument ClustersrikanthshenoyNo ratings yet
- 2-1 Digital Numbering and CodingDocument62 pages2-1 Digital Numbering and Codingseyoum shimelsNo ratings yet
- ReferenceManual HexView PDFDocument93 pagesReferenceManual HexView PDFDCNo ratings yet
- STAG TAP 01 02 Manual v1.3.5 Eng PDFDocument31 pagesSTAG TAP 01 02 Manual v1.3.5 Eng PDFประยงค์ แก่นจัทร์No ratings yet
- Enhanced Willem Programmer ManualDocument20 pagesEnhanced Willem Programmer Manualtoner5No ratings yet
- Installation Instructions Rear View Camera: Einzellizenz Renaud Doumenc - 19 Bis Avenue de Baixas - 66240 Saint-EsteveDocument23 pagesInstallation Instructions Rear View Camera: Einzellizenz Renaud Doumenc - 19 Bis Avenue de Baixas - 66240 Saint-EsteveD.M.C Doums Motor Company (Doums)No ratings yet
- Number System in C ProgrammingDocument78 pagesNumber System in C ProgrammingKashish GulatiNo ratings yet
- Advanced Tuning of A Delco ECM - V1.02Document23 pagesAdvanced Tuning of A Delco ECM - V1.02Leiden O'SullivanNo ratings yet
- Ground Zero Gzha2350 Schematic.Document3 pagesGround Zero Gzha2350 Schematic.Radu PavalNo ratings yet
- Introduction To MicrocontrollerDocument27 pagesIntroduction To Microcontrollerpcalver2000100% (1)
- Using PWM With Code WarriorDocument14 pagesUsing PWM With Code WarriorGowrishankar Gupta100% (1)
- Passat CCDocument429 pagesPassat CCVasile ConstantinescuNo ratings yet
- Dme 1.1 1.3Document7 pagesDme 1.1 1.3Minas HarutyunyanNo ratings yet
- LetRipp Fuel Tuner Tuning Guide V1.0!07!03 - 07Document10 pagesLetRipp Fuel Tuner Tuning Guide V1.0!07!03 - 07tastreNo ratings yet
- P.Kay ECU CodesDocument8 pagesP.Kay ECU Codesadgjl123456100% (1)
- PIC ControllerDocument74 pagesPIC ControllerVikas Jaiswal100% (2)
- PIC Notes Embedded SystemsDocument5 pagesPIC Notes Embedded SystemsVonn Salty100% (3)
- Stag Tuning - Manual Eng Ver. 1.2Document8 pagesStag Tuning - Manual Eng Ver. 1.2probaNo ratings yet
- VW Audi AirbagDocument14 pagesVW Audi Airbagpavkvl100% (1)
- Audi A6 DataDocument5 pagesAudi A6 DataManikanta JNo ratings yet
- Injection Completo 960 V22 Ingles PDFDocument29 pagesInjection Completo 960 V22 Ingles PDFbogdanNo ratings yet
- Building My 4G LTE Mimo Antenna Prototype - About Technologies For Your Digital HomeDocument1 pageBuilding My 4G LTE Mimo Antenna Prototype - About Technologies For Your Digital HomemoannaNo ratings yet
- Mo TronicDocument2 pagesMo TronicdromakiNo ratings yet
- Flow Sensor: AHS 1853 Automotive Sensor & Actuator HairulazmiDocument27 pagesFlow Sensor: AHS 1853 Automotive Sensor & Actuator Hairulazmiamirul lex100% (1)
- VP37 Remap Guide Rev 4Document22 pagesVP37 Remap Guide Rev 4Georgiana MarinNo ratings yet
- Codificare VWDocument2 pagesCodificare VWnicolicescu_claudiu5152No ratings yet
- TransmissionDocument6 pagesTransmissionMoti LemiNo ratings yet
- How To Guide 2014Document16 pagesHow To Guide 2014Lebanon_PublishingNo ratings yet
- Kdl40d3100 LCD TVDocument73 pagesKdl40d3100 LCD TVRM200No ratings yet
- Boost Control ECtuneDocument6 pagesBoost Control ECtunePaulo EstêvãoNo ratings yet
- Audi Odometer Gear Replacement PDFDocument9 pagesAudi Odometer Gear Replacement PDFVictor ヅ ShegoNo ratings yet
- Continental Ram Automotive Product Catalogue 08-09-17Document164 pagesContinental Ram Automotive Product Catalogue 08-09-17Jenny Mora LeonNo ratings yet
- 90-25 Instrument Cluster Location Diagram From M.Y. 2000 PDFDocument28 pages90-25 Instrument Cluster Location Diagram From M.Y. 2000 PDFmefisto06cNo ratings yet
- Speed Control of DC Motor Using PWMDocument23 pagesSpeed Control of DC Motor Using PWMSunitha MaryNo ratings yet
- DAC ConceptDocument6 pagesDAC ConceptMuhammad Isfan TauhidNo ratings yet
- DC Motor Speed Control Using Microcontroller: AbstractDocument5 pagesDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuNo ratings yet
- Final Report Acs 12Document36 pagesFinal Report Acs 12Abhishek SinghNo ratings yet
- Microcontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMDocument4 pagesMicrocontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMSphasonke Daniel ZhouNo ratings yet
- Speed Control of A Conveyor BeltDocument24 pagesSpeed Control of A Conveyor BeltSumu Talal50% (2)
- HockeyDocument2 pagesHockeyEdul BrianNo ratings yet
- Ict JS2 2ND Term 2022Document4 pagesIct JS2 2ND Term 2022Edul BrianNo ratings yet
- SS2 2022Document5 pagesSS2 2022Edul BrianNo ratings yet
- JSS3 Second Term 2022Document3 pagesJSS3 Second Term 2022Edul Brian100% (2)
- Climate ChangeDocument6 pagesClimate ChangeEdul BrianNo ratings yet
- ADSSOB ConstitutionDocument25 pagesADSSOB ConstitutionEdul BrianNo ratings yet
- Ict JS1 2ND Term 2022Document2 pagesIct JS1 2ND Term 2022Edul BrianNo ratings yet
- Ict SS 1 2ND Term 2022Document5 pagesIct SS 1 2ND Term 2022Edul BrianNo ratings yet
- Modification of Emulsion Paint Using Chitosan-Grafted-Acrylic AcidDocument91 pagesModification of Emulsion Paint Using Chitosan-Grafted-Acrylic AcidEdul BrianNo ratings yet
- A Slide Is A Single Screen of A Presentation, and Every Presentation Is Composed of Several SlidesDocument3 pagesA Slide Is A Single Screen of A Presentation, and Every Presentation Is Composed of Several SlidesEdul BrianNo ratings yet
- DESIGN CONSTRUCTION AND PERFORMANCE EVALUATION OF 1kVADocument16 pagesDESIGN CONSTRUCTION AND PERFORMANCE EVALUATION OF 1kVAEdul BrianNo ratings yet
- DESIGN CONSTRUCTION AND PERFORMANCE EVALUATION OF 1kVADocument16 pagesDESIGN CONSTRUCTION AND PERFORMANCE EVALUATION OF 1kVAEdul BrianNo ratings yet
- Design and Construction of 1 KVA Power Inverter SystemDocument14 pagesDesign and Construction of 1 KVA Power Inverter SystemEdul BrianNo ratings yet
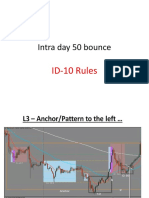
- Intra Day 50 Bounce: ID-10 RulesDocument15 pagesIntra Day 50 Bounce: ID-10 RulesEdul BrianNo ratings yet
- Design, Construction and Testingof Voltage Sensitive Single-Phase Automatic Changeover Switch For Low Power Generators M. O. Eshovo and A. SalawuDocument4 pagesDesign, Construction and Testingof Voltage Sensitive Single-Phase Automatic Changeover Switch For Low Power Generators M. O. Eshovo and A. SalawuEdul BrianNo ratings yet
- Speed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveDocument4 pagesSpeed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveEdul BrianNo ratings yet
- Genetic Tuned PID Controller For Speed Control of DC Motor: Priyanka Suresh, M S AspalliDocument4 pagesGenetic Tuned PID Controller For Speed Control of DC Motor: Priyanka Suresh, M S AspalliEdul BrianNo ratings yet
- Basic Crypto PrimitivesDocument47 pagesBasic Crypto PrimitivesAsha MuruganNo ratings yet
- E-Commerce Infrastructure: The Internet, Web and Mobile PlatformDocument52 pagesE-Commerce Infrastructure: The Internet, Web and Mobile PlatformMoti DiroNo ratings yet
- Four Metaphors We Need To Understand Assessment: Robert J. MislevyDocument36 pagesFour Metaphors We Need To Understand Assessment: Robert J. MislevyErven Jay EscobilloNo ratings yet
- FDMAP FDDOCAPSULE Rev ADocument48 pagesFDMAP FDDOCAPSULE Rev Aslam12125No ratings yet
- Subject: - Evolution of Information Technology (IT)Document30 pagesSubject: - Evolution of Information Technology (IT)EyaminNo ratings yet
- Ascendance VillivakkamDocument3 pagesAscendance Villivakkamsonaiya software solutionsNo ratings yet
- Emc 1 PDFDocument448 pagesEmc 1 PDFJayashreeNo ratings yet
- Teste Wager NovoDocument6 pagesTeste Wager NovogaleriecezanneNo ratings yet
- DIH Business Plan SDocument16 pagesDIH Business Plan SAudience Connect ServicesNo ratings yet
- Polytek International Distributor ListDocument3 pagesPolytek International Distributor ListArieza PerdhanaNo ratings yet
- Manual para Referencia PDFDocument38 pagesManual para Referencia PDFCarlos LuisNo ratings yet
- Test Item Analysis Calculator v3Document3 pagesTest Item Analysis Calculator v3Jovenil Bacatan100% (1)
- Unblocking Teamwork: Four Tools and Strategies To Improve CollaborationDocument17 pagesUnblocking Teamwork: Four Tools and Strategies To Improve CollaborationYusuf KusumaNo ratings yet
- Perubahan Penutupan Lahan Berdasarkan Analisis Citra Digital Di Daerah Aliran Sungai MahakamDocument7 pagesPerubahan Penutupan Lahan Berdasarkan Analisis Citra Digital Di Daerah Aliran Sungai Mahakammiss mdNo ratings yet
- Seemous PaperDocument2 pagesSeemous PaperAbd HafidNo ratings yet
- Chapter 4Document1 pageChapter 4Karen CaelNo ratings yet
- IT8 Lesson 1 - Transformation of ERD To Relational Schema (Midterms)Document24 pagesIT8 Lesson 1 - Transformation of ERD To Relational Schema (Midterms)Marvin BucsitNo ratings yet
- Raymond RevillaDocument4 pagesRaymond RevillaKaguraNo ratings yet
- NessusDocument15 pagesNessusAizzad HelmiNo ratings yet
- Activity 2.2.2 Karnaugh Mapping POS Solutions: Name: Date: PeriodDocument5 pagesActivity 2.2.2 Karnaugh Mapping POS Solutions: Name: Date: PeriodDulce MelendezNo ratings yet
- Jacob LeistenDocument1 pageJacob Leistenapi-542817921No ratings yet
- Montgomery Bell-Barnard-Asbury-Aff-University of Kentucky Season Opener-Round3Document50 pagesMontgomery Bell-Barnard-Asbury-Aff-University of Kentucky Season Opener-Round3jzocmgnkuivqtmubddNo ratings yet
- Hotel Management System ReportDocument52 pagesHotel Management System ReportvoriroNo ratings yet
- Internet Programming Unit 1 (In-Complete)Document27 pagesInternet Programming Unit 1 (In-Complete)zayeem NejiNo ratings yet
- Shapely Documentation: Release 1.6.4.post1Document60 pagesShapely Documentation: Release 1.6.4.post1xcb32No ratings yet
- Symantec Endpoint Protection PDFDocument6 pagesSymantec Endpoint Protection PDFErica Volpi WerkmannNo ratings yet
- Data Sheet Coolcheck 2Document2 pagesData Sheet Coolcheck 2pera detlicNo ratings yet