You might also like
- Automated Parallel Parking RobotDocument49 pagesAutomated Parallel Parking RobotAndrei OlaruNo ratings yet
- Full Text 01Document49 pagesFull Text 01Daniel OliveiraNo ratings yet
- Robot Vacuum Cleaner: Joel Bergman and Jonas LindDocument70 pagesRobot Vacuum Cleaner: Joel Bergman and Jonas LindMít Tơ TươiNo ratings yet
- Gr29rapport2021 02Document50 pagesGr29rapport2021 02Ibrahim NshimiyimanaNo ratings yet
- The Stabilizing SpoonDocument63 pagesThe Stabilizing SpoonRicardo OrtegaNo ratings yet
- Solar Tracker CompleteDocument40 pagesSolar Tracker CompleteFelix AlsonadoNo ratings yet
- Self-Balancing Robot: Fredrik Ihrfelt William MarinDocument76 pagesSelf-Balancing Robot: Fredrik Ihrfelt William MarinrbenseghierNo ratings yet
- Gr18rapport2021 02Document46 pagesGr18rapport2021 02umair saifNo ratings yet
- ETB ThesisDocument69 pagesETB ThesisMoe Moe LwinNo ratings yet
- Fulltext01 3Document45 pagesFulltext01 3Phạm TuấnNo ratings yet
- 2006 Santhosh - ReportDocument33 pages2006 Santhosh - ReportMohamed Hechmi JERIDINo ratings yet
- Inspo de Recherche Bib (Sujet Plutot Electromecanique)Document68 pagesInspo de Recherche Bib (Sujet Plutot Electromecanique)Oumaima ChanchanNo ratings yet
- Smart Lightning IOT System.: ProjectDocument32 pagesSmart Lightning IOT System.: ProjectHoàn NguyễnNo ratings yet
- Anti Collision Mechanism in VehiclesDocument39 pagesAnti Collision Mechanism in VehiclesMuhammad QasimNo ratings yet
- Machine Learning BasicsDocument68 pagesMachine Learning BasicsABHISHEK KUMBHARNo ratings yet
- Digital Signal Procesing Lab Complex Engineering Design Submitted TO Mam Rida Maamoor BYDocument19 pagesDigital Signal Procesing Lab Complex Engineering Design Submitted TO Mam Rida Maamoor BYRana DastgirNo ratings yet
- Project ReportDocument74 pagesProject ReportParth KunkolienkarNo ratings yet
- Omnidirectional Quadruped RobotDocument59 pagesOmnidirectional Quadruped RobotB.M.S ChamsaNo ratings yet
- Robot Arm ProjectDocument82 pagesRobot Arm Projectkeegan van den bergNo ratings yet
- Annicchiaricopetruzzelli Thesis 2017Document90 pagesAnnicchiaricopetruzzelli Thesis 2017Lia SantillanNo ratings yet
- Project On The Design of An Inertial Measurement Unit To Be Used in Aerospace VehiclesDocument96 pagesProject On The Design of An Inertial Measurement Unit To Be Used in Aerospace VehiclesmiguelNo ratings yet
- Final Year Project Report: Colin SmithDocument37 pagesFinal Year Project Report: Colin Smithsherii07No ratings yet
- Analog and Digital Signal ProcessingDocument821 pagesAnalog and Digital Signal Processingnowayjose666100% (15)
- FULLTEXT01Document45 pagesFULLTEXT01Faiza Tabassam 546-FET/BSEE/F19No ratings yet
- Thesis PDFDocument50 pagesThesis PDFabdulsemedNo ratings yet
- FULLTEXT01Document63 pagesFULLTEXT01BazinNo ratings yet
- Gr33rapport2021 02Document53 pagesGr33rapport2021 02Zakhan KimahNo ratings yet
- Riderless Self-Balancing BicycleDocument84 pagesRiderless Self-Balancing BicycleSangam PatariNo ratings yet
- Orientation Estimation and Movement Recognition Using Low Cost SensorsDocument79 pagesOrientation Estimation and Movement Recognition Using Low Cost SensorsSemih AteşNo ratings yet
- Design of Future Low-Energy LED Replacement For Fluorescent TubesDocument46 pagesDesign of Future Low-Energy LED Replacement For Fluorescent TubesElenaNo ratings yet
- LVGLDocument488 pagesLVGLsajad hejaziNo ratings yet
- Rubik's Cube Solving Robot Project DocumentationDocument98 pagesRubik's Cube Solving Robot Project DocumentationAldi RenadiNo ratings yet
- Phys-Osc: An Interactive Physics-based Environment for Sound SynthesisDocument51 pagesPhys-Osc: An Interactive Physics-based Environment for Sound SynthesisJason DoyleNo ratings yet
- Final - Report - 06 10 2016 PDFDocument30 pagesFinal - Report - 06 10 2016 PDFShishir PatilNo ratings yet
- Development of a low-cost laser rangefinder (LIDARDocument67 pagesDevelopment of a low-cost laser rangefinder (LIDARcrazyjuzNo ratings yet
- Python For Android PDFDocument44 pagesPython For Android PDFabuobidaNo ratings yet
- Video Conferencing - User Interface With A Remote Control For TV-setsDocument84 pagesVideo Conferencing - User Interface With A Remote Control For TV-setsJugJyoti BorGohainNo ratings yet
- Positioning and Docking of An AGV in A Clinical EnvironmentDocument69 pagesPositioning and Docking of An AGV in A Clinical EnvironmentGiovaniAricettiNo ratings yet
- Making Radioactive Ion Beams Detecting Reaction ProductsDocument28 pagesMaking Radioactive Ion Beams Detecting Reaction ProductsInês AlmeidaNo ratings yet
- TUM Micromouse Design ReportDocument42 pagesTUM Micromouse Design ReportBird 9No ratings yet
- Lab Assignement Ue22 2020 PDFDocument24 pagesLab Assignement Ue22 2020 PDFAlam Castillo HerreraNo ratings yet
- Project Report Robotics and Autonomous Systems 2D1426 Nada, KTHDocument45 pagesProject Report Robotics and Autonomous Systems 2D1426 Nada, KTHAshish GoyalNo ratings yet
- Design and Implementation of A Real-Time Embedded ApplicationDocument57 pagesDesign and Implementation of A Real-Time Embedded ApplicationYishay EphraimNo ratings yet
- CanSat Final Paper 2018 - Team HunSat's GSM Spectrum Analysis CanSatDocument67 pagesCanSat Final Paper 2018 - Team HunSat's GSM Spectrum Analysis CanSattuguldur bayaraa100% (1)
- Manual For Speex 2007v2Document65 pagesManual For Speex 2007v2thatgamesguy1965No ratings yet
- Automated Testing of Robotic Systems in Simulated EnvironmentsDocument51 pagesAutomated Testing of Robotic Systems in Simulated EnvironmentsDavid BlaževićNo ratings yet
- TechnicitéDocument113 pagesTechnicitéPierre NgoyNo ratings yet
- Development of A Ball Balancing Robot With Omni WheelsDocument65 pagesDevelopment of A Ball Balancing Robot With Omni Wheelsruben210979No ratings yet
- Automagica Readthedocs Io en Latest PDFDocument146 pagesAutomagica Readthedocs Io en Latest PDFkcmkcmNo ratings yet
- Part 1 - ArduinoDocument16 pagesPart 1 - Arduinotranghuynhgiabao2005No ratings yet
- IOT TutorialDocument40 pagesIOT TutorialTuấn HồNo ratings yet
- FFR125 LectureNotesDocument122 pagesFFR125 LectureNotesshivaprasadmvit100% (1)
- Vehicle Sensor Data Real Time Visualizer: Erik Karlsson Henrik OlssonDocument80 pagesVehicle Sensor Data Real Time Visualizer: Erik Karlsson Henrik Olssonايمن الزعوريNo ratings yet
- Arduino Project Report - Academic Project: November 2018Document21 pagesArduino Project Report - Academic Project: November 2018shazallyNo ratings yet
- Designing and Testing multi-functional Cobot Gripper (1)Document60 pagesDesigning and Testing multi-functional Cobot Gripper (1)harshbodkhe2002No ratings yet
- Arduino Project Report - Academic Project: November 2018Document21 pagesArduino Project Report - Academic Project: November 2018Hassan allaNo ratings yet
- Chisel BookDocument184 pagesChisel Booklior199No ratings yet
- Ultra Analog VA-2 ManualDocument66 pagesUltra Analog VA-2 ManualVictor VelasquezNo ratings yet
- Robotics Real-Time Programming GuideDocument112 pagesRobotics Real-Time Programming GuideNazar KurylkoNo ratings yet
- EeeDocument6 pagesEeeSIDDESH G SNo ratings yet
- Apraava Energy SolarDocument3 pagesApraava Energy SolarSIDDESH G SNo ratings yet
- CDPQ Increases Stake in Apraava Energy to 50Document3 pagesCDPQ Increases Stake in Apraava Energy to 50SIDDESH G SNo ratings yet
- Know More Content For Laptop DI V1 MKKRWLDocument2 pagesKnow More Content For Laptop DI V1 MKKRWLSIDDESH G SNo ratings yet
- Amblika 39Document4 pagesAmblika 39SIDDESH G SNo ratings yet
- Instructions To StudentsDocument5 pagesInstructions To StudentsSIDDESH G SNo ratings yet
- Power TheftDocument155 pagesPower TheftSIDDESH G SNo ratings yet
- X-Ray Generator Communication User's Manual - V1.80 L-IE-4211Document66 pagesX-Ray Generator Communication User's Manual - V1.80 L-IE-4211Marcos Peñaranda TintayaNo ratings yet
- Winter's Bracing Approach RevisitedDocument5 pagesWinter's Bracing Approach RevisitedJitendraNo ratings yet
- Medication Calculation Examination Study Guide: IV CalculationsDocument2 pagesMedication Calculation Examination Study Guide: IV Calculationswaqas_xsNo ratings yet
- CHM131 Presentation - Oxidation of MetalsDocument11 pagesCHM131 Presentation - Oxidation of MetalsNazrul ShahNo ratings yet
- Bài Tập Phần Project ManagementDocument11 pagesBài Tập Phần Project ManagementhunfgNo ratings yet
- Gen 001 Sas 4Document4 pagesGen 001 Sas 4Michael MarzonNo ratings yet
- The Joint Force Commander's Guide To Cyberspace Operations: by Brett T. WilliamsDocument8 pagesThe Joint Force Commander's Guide To Cyberspace Operations: by Brett T. Williamsأريزا لويسNo ratings yet
- 01 A Brief Introduction To Cloud ComputingDocument25 pages01 A Brief Introduction To Cloud ComputingfirasibraheemNo ratings yet
- My Watch Runs WildDocument3 pagesMy Watch Runs WildLarissa SnozovaNo ratings yet
- Psych 1xx3 Quiz AnswersDocument55 pagesPsych 1xx3 Quiz Answerscutinhawayne100% (4)
- Cengage Eco Dev Chapter 13 - The Environment and Sustainable Development in AsiaDocument32 pagesCengage Eco Dev Chapter 13 - The Environment and Sustainable Development in AsiaArcy LeeNo ratings yet
- Community HelpersDocument3 pagesCommunity Helpersapi-252790280100% (1)
- Lost Jar Action: WCP Slickline Europe Learning Centre SchlumbergerDocument19 pagesLost Jar Action: WCP Slickline Europe Learning Centre SchlumbergerMohsin PvNo ratings yet
- Year 12 Holiday Homework Term 3Document4 pagesYear 12 Holiday Homework Term 3Lucas GauciNo ratings yet
- Cyrustek ES51966 (Appa 505)Document25 pagesCyrustek ES51966 (Appa 505)budi0251No ratings yet
- DTS-00750 Mast Maintenance ManualDocument12 pagesDTS-00750 Mast Maintenance Manualsertecs polNo ratings yet
- 6 An Indian American Woman in Space 2Document11 pages6 An Indian American Woman in Space 2Manju YadavNo ratings yet
- IBM TS2900 Tape Autoloader RBDocument11 pagesIBM TS2900 Tape Autoloader RBLeonNo ratings yet
- Summative Test For Quadratic Equations2Document2 pagesSummative Test For Quadratic Equations2AsmiraMangontra0% (1)
- Andromeda Council About The 4th DimensionDocument11 pagesAndromeda Council About The 4th DimensionWonderlust100% (1)
- Active Directory: Lab 1 QuestionsDocument2 pagesActive Directory: Lab 1 QuestionsDaphneHarrisNo ratings yet
- Determination of Atenolol in Pharmaceutical Dosages by Fourier Transform Infrared Spectrometry (FTIR)Document11 pagesDetermination of Atenolol in Pharmaceutical Dosages by Fourier Transform Infrared Spectrometry (FTIR)Geovas GomezNo ratings yet
- F FS1 Activity 3 EditedDocument15 pagesF FS1 Activity 3 EditedRayshane Estrada100% (1)
- BED 101 Voc & Tech. Course ContentDocument3 pagesBED 101 Voc & Tech. Course ContentSunday PaulNo ratings yet
- Daftar Pustaka DaniDocument3 pagesDaftar Pustaka Danidokter linggauNo ratings yet
- Nitobond SBR (Latex)Document4 pagesNitobond SBR (Latex)Samarakoon Banda100% (1)
- St. Anthony College Calapan City Syllabus: Course DescriptionDocument6 pagesSt. Anthony College Calapan City Syllabus: Course DescriptionAce HorladorNo ratings yet
- DSC analysis of hair denaturationDocument2 pagesDSC analysis of hair denaturationDiosel Rezia PrazaNo ratings yet
- If Sentences Type 1 First Type Conditionals Grammar Drills - 119169Document2 pagesIf Sentences Type 1 First Type Conditionals Grammar Drills - 119169Ivanciu DanNo ratings yet
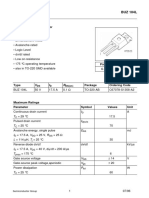
- Sipmos Power Transistor: BUZ 104LDocument10 pagesSipmos Power Transistor: BUZ 104LAlexsander MeloNo ratings yet