You might also like
- Embedded Systems Design with Platform FPGAs: Principles and PracticesFrom EverandEmbedded Systems Design with Platform FPGAs: Principles and PracticesRating: 5 out of 5 stars5/5 (1)
- HPCS 2018 Extended Abstract Eric RuttenDocument3 pagesHPCS 2018 Extended Abstract Eric RuttensaraNo ratings yet
- Dynamic Reconfigurability in Embedded System Design: Vincenzo Rana, Marco Santambrogio, Donatella SciutoDocument4 pagesDynamic Reconfigurability in Embedded System Design: Vincenzo Rana, Marco Santambrogio, Donatella SciutoAzizul BaharNo ratings yet
- Artigo CompDocument16 pagesArtigo CompcesarNo ratings yet
- Efficient Reconfigurable On-ChipDocument11 pagesEfficient Reconfigurable On-ChipsuganyaNo ratings yet
- Design Flow For Configurable ArchitecturesDocument28 pagesDesign Flow For Configurable ArchitecturesanilkumaradhikariNo ratings yet
- Wisniewski 18Document16 pagesWisniewski 18ddddNo ratings yet
- OS Final PaperDocument21 pagesOS Final PaperSharan SharmaNo ratings yet
- Dynamic Partial Reconfiguration in FpgasDocument4 pagesDynamic Partial Reconfiguration in FpgasPingakshya GoswamiNo ratings yet
- Development of Multiobjective High LevelDocument25 pagesDevelopment of Multiobjective High Levelhemanth235No ratings yet
- I-Core: A Run-Time Adaptive Processor For Embedded Multi-Core SystemsDocument8 pagesI-Core: A Run-Time Adaptive Processor For Embedded Multi-Core Systemsinr0000zhaNo ratings yet
- A Light-Weight Approach To Dynamical Runtime Linking Supporting Heterogenous, Parallel, and Reconfigurable ArchitecturesDocument12 pagesA Light-Weight Approach To Dynamical Runtime Linking Supporting Heterogenous, Parallel, and Reconfigurable ArchitecturesAbhishek ChaturvediNo ratings yet
- Dynamic ReconfigurationDocument12 pagesDynamic ReconfigurationSambhav VermanNo ratings yet
- Vaishnav 2018Document8 pagesVaishnav 2018aham krishnahaNo ratings yet
- 10 Hymel Conger AbstractDocument2 pages10 Hymel Conger AbstractTamiltamil TamilNo ratings yet
- FPGA Architectures For Reconfigurable Computing: Manuel G. Gericota, Gustavo R. Alves José M. FerreiraDocument4 pagesFPGA Architectures For Reconfigurable Computing: Manuel G. Gericota, Gustavo R. Alves José M. FerreiraTamiltamil TamilNo ratings yet
- Application-Specific Customization of Fpga: Parameterized Soft-Core ProcessorsDocument8 pagesApplication-Specific Customization of Fpga: Parameterized Soft-Core ProcessorsK.GurucharanNo ratings yet
- Efficiency of Priority Queue Architectures in FPGADocument14 pagesEfficiency of Priority Queue Architectures in FPGAwedevok392No ratings yet
- Pid 411805Document9 pagesPid 411805shadigamalhassanNo ratings yet
- MICPRO PublishedDocument13 pagesMICPRO PublishedKeran KomalNo ratings yet
- Efficient Implementation of Scan Register Insertion On Integer Arithmetic Cores For FpgasDocument6 pagesEfficient Implementation of Scan Register Insertion On Integer Arithmetic Cores For FpgasAbhishek JoarderNo ratings yet
- GPU Versus FPGA For High Productivity Computing: Imperial College London, Electrical and Electronic Engineering, LondonDocument6 pagesGPU Versus FPGA For High Productivity Computing: Imperial College London, Electrical and Electronic Engineering, LondonUsama JavedNo ratings yet
- Matrix MultiplictionDocument5 pagesMatrix Multiplictionqsashutosh100% (1)
- FPGA Genreal PaperDocument7 pagesFPGA Genreal PaperParth SomkuwarNo ratings yet
- Jimaging 05 00016Document22 pagesJimaging 05 00016vn7196No ratings yet
- FPGA BasedDocument7 pagesFPGA BasedPushpa LathaNo ratings yet
- MigrationOflongrunningtasks OknodleDocument6 pagesMigrationOflongrunningtasks Oknodleyame asfiaNo ratings yet
- Embedded SystemDocument10 pagesEmbedded SystemBikash RoutNo ratings yet
- A Framework For Reconfigurable Computing: Task Scheduling and Context ManagementDocument16 pagesA Framework For Reconfigurable Computing: Task Scheduling and Context ManagementrmaestrecetemNo ratings yet
- A Hardware Software Partitioning LibreDocument7 pagesA Hardware Software Partitioning LibreLucky SharanNo ratings yet
- Choi Asap14 KmeansDocument8 pagesChoi Asap14 KmeansjefferyleclercNo ratings yet
- 22.multioperand Redundant Adders On FPGAsDocument13 pages22.multioperand Redundant Adders On FPGAsadaNo ratings yet
- On-The - y Composition of FPGA-Based SQL Query Accelerators Using A Partially Reconfigurable Module LibraryDocument8 pagesOn-The - y Composition of FPGA-Based SQL Query Accelerators Using A Partially Reconfigurable Module LibraryTimNo ratings yet
- RECONFIGURABLE COMPUTING PresentationDocument23 pagesRECONFIGURABLE COMPUTING PresentationNitin KumarNo ratings yet
- 3-Tier Reconfiguration Model For Fpgas Using Hardwired Network On ChipDocument6 pages3-Tier Reconfiguration Model For Fpgas Using Hardwired Network On ChipAqeel WahlahNo ratings yet
- Reconfigurable ComputingDocument38 pagesReconfigurable ComputingHemant BhojwaniNo ratings yet
- Colloquium Report 19ELB431Document15 pagesColloquium Report 19ELB431honey singhNo ratings yet
- Low-Cost Hardware Profiling of Run-Time and Energy in FPGA Embedded ProcessorsDocument8 pagesLow-Cost Hardware Profiling of Run-Time and Energy in FPGA Embedded ProcessorssavantkNo ratings yet
- Efficient Partial Reconfiguration Management on Xilinx ZynqDocument4 pagesEfficient Partial Reconfiguration Management on Xilinx Zynqsrinivas eNo ratings yet
- Oliver-Maskell2007 Article PreroutedFPGACoresForRapidSystDocument7 pagesOliver-Maskell2007 Article PreroutedFPGACoresForRapidSystBruno MeloNo ratings yet
- FPGA Implementations of Feed Forward Neural Network by Using Floating Point Hardware AcceleratorsDocument10 pagesFPGA Implementations of Feed Forward Neural Network by Using Floating Point Hardware AcceleratorsCarlos Torres CasasNo ratings yet
- Platform Based Behavior Level and SystemDocument4 pagesPlatform Based Behavior Level and Systemhemanth235No ratings yet
- ullah2021Document14 pagesullah2021roopa_kothapalliNo ratings yet
- 4-Bit Processing Unit Design Usingvhdl Structural Modeling For Multiprocessor ArchitectureDocument6 pages4-Bit Processing Unit Design Usingvhdl Structural Modeling For Multiprocessor ArchitectureArpan AdakNo ratings yet
- Os Support AdaptiveDocument12 pagesOs Support AdaptiveHugo MarcondesNo ratings yet
- Efficient Digital PID Controller Implementation Based On Virtex-5 FPGADocument5 pagesEfficient Digital PID Controller Implementation Based On Virtex-5 FPGAv.rihaniNo ratings yet
- FPT19 TimingModel 1Document8 pagesFPT19 TimingModel 1Srijeet GuhaNo ratings yet
- System-on-Chip Design and Implementation: Linda E.M. Brackenbury, Luis A. Plana, Senior Member, IEEE and Jeffrey PepperDocument11 pagesSystem-on-Chip Design and Implementation: Linda E.M. Brackenbury, Luis A. Plana, Senior Member, IEEE and Jeffrey PepperAhmed HamoudaNo ratings yet
- 1 Wisniewski2018Document16 pages1 Wisniewski2018Rahul ShandilyaNo ratings yet
- Fusion Engineering and Design: A. Rigoni, G. Manduchi, A. Luchetta, C. Taliercio, T. SchröderDocument4 pagesFusion Engineering and Design: A. Rigoni, G. Manduchi, A. Luchetta, C. Taliercio, T. Schröderdavid Villa SotomayorNo ratings yet
- A Dynamic General Accelerator For Integer and Fixed-Point ProcessingDocument9 pagesA Dynamic General Accelerator For Integer and Fixed-Point ProcessingBanusha chandranNo ratings yet
- FPGAs Memory Synchronization and Performance Evaluation Using The Open Computing Language FrameworkDocument8 pagesFPGAs Memory Synchronization and Performance Evaluation Using The Open Computing Language FrameworkIJRES teamNo ratings yet
- Reconfigurable Computing Using Content Addressable Memory For Improved Performance and Resource UsageDocument6 pagesReconfigurable Computing Using Content Addressable Memory For Improved Performance and Resource UsageNeha TripathiNo ratings yet
- Acceleration of SQL Restrictions and Aggregations Through FPGA-based Dynamic Partial ReconfigurationDocument4 pagesAcceleration of SQL Restrictions and Aggregations Through FPGA-based Dynamic Partial ReconfigurationTimNo ratings yet
- Why Con Gurable Computing? The Computational Density Advantage of Con Gurable ArchitecturesDocument17 pagesWhy Con Gurable Computing? The Computational Density Advantage of Con Gurable ArchitecturesHari KrishnaNo ratings yet
- Reconfigurable Computing: A Survey of Systems and Software: Katherine ComptonDocument40 pagesReconfigurable Computing: A Survey of Systems and Software: Katherine Comptonarchana soniNo ratings yet
- CSEIJ020601Document16 pagesCSEIJ020601cseijNo ratings yet
- Jurnal 2Document15 pagesJurnal 2ammarNo ratings yet
- A CAD Suite For High-Performance FPGA DesignDocument13 pagesA CAD Suite For High-Performance FPGA DesignRomualdo Begale PrudêncioNo ratings yet
- A Multicore Reconfigurable Processor Platform For Energy and Throughput Aware ApplicationsDocument3 pagesA Multicore Reconfigurable Processor Platform For Energy and Throughput Aware Applicationslovelyosmile253No ratings yet
- FG DGFSDFSDF DG - GVDFXGVDF Cogsdpy - CopfysdfsdDocument10 pagesFG DGFSDFSDF DG - GVDFXGVDF Cogsdpy - CopfysdfsdRahul ShandilyaNo ratings yet
- Research ProposalDocument34 pagesResearch Proposalbinaljoshi1_13633864No ratings yet
- Using Partial-Run-Time Reconfigurable Hardware To Accelerate Video Processing in Driver Assistance SystemDocument6 pagesUsing Partial-Run-Time Reconfigurable Hardware To Accelerate Video Processing in Driver Assistance SystemRahul ShandilyaNo ratings yet
- 1 Wisniewski2018Document16 pages1 Wisniewski2018Rahul ShandilyaNo ratings yet
- 23 Robertson2004Document27 pages23 Robertson2004Rahul ShandilyaNo ratings yet
- FG DG XCVBXCVBDGB - Copxcvby - CopyxcvbxcvbDocument21 pagesFG DG XCVBXCVBDGB - Copxcvby - CopyxcvbxcvbRahul ShandilyaNo ratings yet
- Goal-Based Modeling Approach to Develop Requirements of an Adaptive SystemDocument16 pagesGoal-Based Modeling Approach to Develop Requirements of an Adaptive SystemRahul ShandilyaNo ratings yet
- 21 Harkin2004Document25 pages21 Harkin2004Rahul ShandilyaNo ratings yet
- FG DG SDFGVXDGVDGSDF - Copfgvsdfgsdy - CopysdfsdDocument9 pagesFG DG SDFGVXDGVDGSDF - Copfgvsdfgsdy - CopysdfsdRahul ShandilyaNo ratings yet
- XCVXCVXCVXCVDocument6 pagesXCVXCVXCVXCVRahul ShandilyaNo ratings yet
- XdgvdfgvdfbhfgdhdfygvDocument6 pagesXdgvdfgvdfbhfgdhdfygvRahul ShandilyaNo ratings yet
- HGDJGHJNDocument15 pagesHGDJGHJNRahul ShandilyaNo ratings yet
- HRJHFRG DG DG - Cjjjjjjjjjjjjjjjjjjjjjjjopy - CopujjjjjyjjjjyjjDocument8 pagesHRJHFRG DG DG - Cjjjjjjjjjjjjjjjjjjjjjjjopy - CopujjjjjyjjjjyjjRahul ShandilyaNo ratings yet
- FGSDGSDFGSDFGDFGDFDocument7 pagesFGSDGSDFGSDFGDFGDFRahul ShandilyaNo ratings yet
- FG Dfgdfgdgdfopy - CopygsdfgdsfgDocument12 pagesFG Dfgdfgdgdfopy - CopygsdfgdsfgRahul ShandilyaNo ratings yet
- FG XCVXCVBNFGBFGGVXDocument6 pagesFG XCVXCVBNFGBFGGVXRahul ShandilyaNo ratings yet
- FSDFSDFDocument3 pagesFSDFSDFRahul ShandilyaNo ratings yet
- SDFSDFSDF SDFVSDFDocument9 pagesSDFSDFSDF SDFVSDFRahul ShandilyaNo ratings yet
- VXCVBFGXDGG - CopysdDocument15 pagesVXCVBFGXDGG - CopysdRahul ShandilyaNo ratings yet
- Gfsdgsdgopy - CopyfgsdgdfbfvDocument7 pagesGfsdgsdgopy - CopyfgsdgdfbfvRahul ShandilyaNo ratings yet
- GDFGDFBN FGBDGBDFDocument8 pagesGDFGDFBN FGBDGBDFRahul ShandilyaNo ratings yet
- FG DG DGDocument8 pagesFG DG DGRahul ShandilyaNo ratings yet
- SDFSDFSDFSDFSDFFDSFDFDocument9 pagesSDFSDFSDFSDFSDFFDSFDFRahul ShandilyaNo ratings yet
- DFSFSDGSDGB GFBFGDocument10 pagesDFSFSDGSDGB GFBFGRahul ShandilyaNo ratings yet
- ReadMeUSB V2Document7 pagesReadMeUSB V2Rahul ShandilyaNo ratings yet
- SdfsdfsdfsdfbftyhyrtyhrDocument9 pagesSdfsdfsdfsdfbftyhyrtyhrRahul ShandilyaNo ratings yet
- ReadMeUSB V2Document7 pagesReadMeUSB V2Rahul ShandilyaNo ratings yet
- PCD ApplicationDocument2 pagesPCD ApplicationRahul ShandilyaNo ratings yet
- No-Dues Form PDFDocument1 pageNo-Dues Form PDFRahul ShandilyaNo ratings yet
- FPGA Cloud Coverage CNNDocument21 pagesFPGA Cloud Coverage CNNFRANKLIN JOSUE TICONA COAQUIRANo ratings yet
- SpaceWire-to-GigabitEther UesrGuide 20100930Document19 pagesSpaceWire-to-GigabitEther UesrGuide 20100930Isaac LopezNo ratings yet
- Mini Project Report: Submitted byDocument30 pagesMini Project Report: Submitted byAnubhav ShrivastavaNo ratings yet
- Als Sda Fpga 01 3s500eDocument30 pagesAls Sda Fpga 01 3s500eVenu Gopal Rao Aggress100% (1)
- 2019 Ics Mcdanel Zhang Kung DongDocument12 pages2019 Ics Mcdanel Zhang Kung DonglarisszaNo ratings yet
- P-Tile Avalon Streaming IP For PCI Express User GuideDocument222 pagesP-Tile Avalon Streaming IP For PCI Express User GuidemanchuricoNo ratings yet
- PT. Integra Automasi: An Automation and Control CompanyDocument8 pagesPT. Integra Automasi: An Automation and Control CompanyZakky Ibnu FadjrieNo ratings yet
- Chapter 1 QuestionDocument3 pagesChapter 1 QuestionAnonymous ubQDyxUZYBNo ratings yet
- Thesis On LFSRDocument104 pagesThesis On LFSRKaran RoyNo ratings yet
- Open Source GSMDocument6 pagesOpen Source GSMSaadat RehmanNo ratings yet
- VHDL NotesDocument40 pagesVHDL Notesangel_hunNo ratings yet
- Xilinx Reliability Report UG116 v10.11Document96 pagesXilinx Reliability Report UG116 v10.11damien.karkinskyNo ratings yet
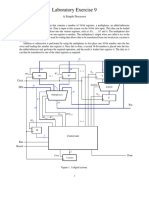
- Lab9 VHDLDocument8 pagesLab9 VHDLFasli CoolNo ratings yet
- An Efficient Hardware Accelerator For Structured Sparse Convolutional Neural Networks On FpgasDocument12 pagesAn Efficient Hardware Accelerator For Structured Sparse Convolutional Neural Networks On FpgasSelva KumarNo ratings yet
- Presented By: Ranjeet Singh Sachin AnandDocument24 pagesPresented By: Ranjeet Singh Sachin AnandSachin AnandNo ratings yet
- ASIC Design and Verification Resume Govinda KeshavdasDocument1 pageASIC Design and Verification Resume Govinda Keshavdasgovindak14No ratings yet
- MTech ECE VLSI ES ES VLSI VLSI DDocument63 pagesMTech ECE VLSI ES ES VLSI VLSI DSivaNo ratings yet
- Sysgen UserDocument416 pagesSysgen Userradhakodirekka8732No ratings yet
- EC8661-VLSI DESIGN LAB-116516724-vlsi Lab Manual PDFDocument146 pagesEC8661-VLSI DESIGN LAB-116516724-vlsi Lab Manual PDFSathish Kumar G Assistant Professor ECE KingstonNo ratings yet
- Nielit EmbeddedDocument21 pagesNielit EmbeddedUtsav Determined RayNo ratings yet
- HDL Lab SyllabusDocument2 pagesHDL Lab Syllabussuhas RNo ratings yet
- Spartan-6 FPGA Packaging and Pinouts: Product SpecificationDocument356 pagesSpartan-6 FPGA Packaging and Pinouts: Product SpecificationAkhil ZaquiNo ratings yet
- Three-Phase Induction Motor Drive by FPGADocument6 pagesThree-Phase Induction Motor Drive by FPGAmani_kumar_16100% (2)
- Xilinx - Solutions For AutomotiveDocument99 pagesXilinx - Solutions For AutomotiveAndres SanchezNo ratings yet
- Rtos & Embedded Lab RecordDocument94 pagesRtos & Embedded Lab RecordYuvarajaNo ratings yet
- Smaple Resume 19 VIT PDFDocument2 pagesSmaple Resume 19 VIT PDFSantosh RathodNo ratings yet
- Block Chain Technology Lecture 8Document32 pagesBlock Chain Technology Lecture 8Osama YaqoobNo ratings yet
- Profibus On The QUICC Engine Block: Application NoteDocument24 pagesProfibus On The QUICC Engine Block: Application NoteSaasiNo ratings yet
- 1991 Xilinx Data Book PDFDocument420 pages1991 Xilinx Data Book PDFztakahashiNo ratings yet