You might also like
- Traffic Flow Simulation by Using A Mathematical Model Based OnDocument4 pagesTraffic Flow Simulation by Using A Mathematical Model Based Onhkabir_juNo ratings yet
- Cavitating Flow Simulation With Mesh Development Using Salome Open Source SoftwareDocument9 pagesCavitating Flow Simulation With Mesh Development Using Salome Open Source SoftwareJonathan ProcelNo ratings yet
- Bedah 1Document6 pagesBedah 1Ersela ZainNo ratings yet
- 8 On The Characteristic Curves For Single Regime Traffic ModelsDocument9 pages8 On The Characteristic Curves For Single Regime Traffic ModelsramadhaniNo ratings yet
- Cover Page - NothingDocument4 pagesCover Page - Nothingupasara_wulung_1980No ratings yet
- Comparison of Rans Turbulence Models and Les in CFD Simulation Using OpenfoamDocument7 pagesComparison of Rans Turbulence Models and Les in CFD Simulation Using OpenfoamSattar Al-JabairNo ratings yet
- A Two Phase Model CavitationDocument11 pagesA Two Phase Model CavitationThePrius0% (1)
- Comparison Between RANS and LES Fo Turbulence Models in CFD Simulation Using OpenFOAMDocument6 pagesComparison Between RANS and LES Fo Turbulence Models in CFD Simulation Using OpenFOAMIsraa YheaaNo ratings yet
- Derivation of Adjoint Drift Flux EquationsDocument21 pagesDerivation of Adjoint Drift Flux Equationsbendel_boyNo ratings yet
- Generalized Macroscopic Traffic Model With Time DelayDocument8 pagesGeneralized Macroscopic Traffic Model With Time DelayramadhaniNo ratings yet
- Computation of Axisymmetric Turbulent Viscous FlowDocument12 pagesComputation of Axisymmetric Turbulent Viscous FlowFurkan YildirimNo ratings yet
- Simulation of Semi Dilute Suspensions of Slender Rods: A Test CaseDocument9 pagesSimulation of Semi Dilute Suspensions of Slender Rods: A Test CaseRadhakrishnan Krishnan NairNo ratings yet
- Numerical Simulation of A Mathematical Traffic Flow Model Based On A Nonlinear Velocity-Density FunctionDocument23 pagesNumerical Simulation of A Mathematical Traffic Flow Model Based On A Nonlinear Velocity-Density Functionhkabir_juNo ratings yet
- A Comparative Study of Turbulence Models Performance For Turbulent Flow in A Planar Asymmetric DiffuserDocument12 pagesA Comparative Study of Turbulence Models Performance For Turbulent Flow in A Planar Asymmetric DiffuserMukesh BohraNo ratings yet
- Fluids 04 00081 - PubDocument24 pagesFluids 04 00081 - PubGuillermo ArayaNo ratings yet
- Comparison of the Effects of k-, k-ω, and Zero Equation Models on Characterization of Turbulent Permeability of Porous MediaDocument8 pagesComparison of the Effects of k-, k-ω, and Zero Equation Models on Characterization of Turbulent Permeability of Porous MediaGanesh GPNo ratings yet
- Lagrangian CoordinatesDocument19 pagesLagrangian Coordinatesjiexing ZhangNo ratings yet
- A Fairness-Based Congestion Control Algorithm For Multipath TCPDocument7 pagesA Fairness-Based Congestion Control Algorithm For Multipath TCPAbi AnnunNo ratings yet
- Two-Equation Eddy-Viscosity Turbulence Model For Computing Drag Force On Axisymmetric Underwater Vehicle Hull FormDocument7 pagesTwo-Equation Eddy-Viscosity Turbulence Model For Computing Drag Force On Axisymmetric Underwater Vehicle Hull FormElyas Nur FridayanaNo ratings yet
- Modelamiento de Sistemas MultifasicosDocument21 pagesModelamiento de Sistemas MultifasicosEdi Agurto CarrascoNo ratings yet
- Hybrid RANS-LES Turbulence Models On Unstructured Grids: C. Eric Lynch and Marilyn J. SmithDocument14 pagesHybrid RANS-LES Turbulence Models On Unstructured Grids: C. Eric Lynch and Marilyn J. SmithAerospaceAngelNo ratings yet
- Numerical Methods in Geotechnical Engineering: All Functions Active Only With Adobe Reader Version 6.0Document7 pagesNumerical Methods in Geotechnical Engineering: All Functions Active Only With Adobe Reader Version 6.0Snezana VulovicNo ratings yet
- A Coupled System of Hadamard Type Sequential Fractional Differential Equations With Coupled Strip ConditionsDocument8 pagesA Coupled System of Hadamard Type Sequential Fractional Differential Equations With Coupled Strip ConditionsMehboob AlamNo ratings yet
- Operating Characteristics of An Agitator With A Draught TubeDocument6 pagesOperating Characteristics of An Agitator With A Draught TubeMuhammadRiadyNo ratings yet
- A Refined VOF MethodDocument43 pagesA Refined VOF MethodJessica MariñoNo ratings yet
- Optimization of A Static Mixing Device Using The Continuous Adjoint To A Two-Phase Mixing ModelDocument22 pagesOptimization of A Static Mixing Device Using The Continuous Adjoint To A Two-Phase Mixing ModelMichael MedinaNo ratings yet
- Dynamic Modeling of SCARA Robot Based On Udwadia-Kalaba TheoryDocument12 pagesDynamic Modeling of SCARA Robot Based On Udwadia-Kalaba TheoryCchh UuyyNo ratings yet
- 03po Fa 2 5 PDFDocument3 pages03po Fa 2 5 PDFMarcelo Varejão CasarinNo ratings yet
- FluidsDocument12 pagesFluidsChristian Ve GaNo ratings yet
- 326Document8 pages326Aditya DeshpandeNo ratings yet
- Darcy Flows New ADocument18 pagesDarcy Flows New AThi KieuNo ratings yet
- Application On Non Linear Waves Traffic FlowDocument10 pagesApplication On Non Linear Waves Traffic FlowJASH MATHEWNo ratings yet
- Probabilistic Study of The Aerodynamic Around A 3D WingDocument11 pagesProbabilistic Study of The Aerodynamic Around A 3D WingAlfredo Gonzalez SoteloNo ratings yet
- Linear Decision Rules For Seasonal Hydropower Planning: Modelling ConsiderationsDocument8 pagesLinear Decision Rules For Seasonal Hydropower Planning: Modelling ConsiderationsAnonymous EY1AabNo ratings yet
- CFD modelling approaches against single wind turbine wake measurementsDocument17 pagesCFD modelling approaches against single wind turbine wake measurementsTareq Abdussalam KhamllagNo ratings yet
- Quantum Moment Hydrodynamics and The Entropy Principle: P. Degond and C. RinghoferDocument34 pagesQuantum Moment Hydrodynamics and The Entropy Principle: P. Degond and C. RinghofersoibalNo ratings yet
- A CFD-based Wind Solver For An Urban Fast Response Transport and Dispersion ModelDocument26 pagesA CFD-based Wind Solver For An Urban Fast Response Transport and Dispersion ModelMarco Della PelleNo ratings yet
- Q functionTheRamanujanJournalDocument15 pagesQ functionTheRamanujanJournalLata ChanchlaniNo ratings yet
- Oliveira Santos Carama AIProcDocument5 pagesOliveira Santos Carama AIProcLarissa FigueiredoNo ratings yet
- Effect of Rans Turbulence Model in Hydraulic Jump CFD SimulationsDocument9 pagesEffect of Rans Turbulence Model in Hydraulic Jump CFD Simulationsdurgam kkNo ratings yet
- Numerical Modeling of Flow Over A Rectangular Broa PDFDocument12 pagesNumerical Modeling of Flow Over A Rectangular Broa PDFSawab MadeneNo ratings yet
- High-Order Discontinuous Galerkin Methods For CFD: March 2011Document33 pagesHigh-Order Discontinuous Galerkin Methods For CFD: March 2011ZhifengNo ratings yet
- Selection of Best Suitable Traffic Model: Axay S. Shah, Jaydeepsinh P. Chudasama Dr. (MRS.) T.A.DesaiDocument4 pagesSelection of Best Suitable Traffic Model: Axay S. Shah, Jaydeepsinh P. Chudasama Dr. (MRS.) T.A.Desaiwhg.jihanNo ratings yet
- An Overview of Smoothed Particle Hydrodynamics For Simulating Multiphase FlowDocument31 pagesAn Overview of Smoothed Particle Hydrodynamics For Simulating Multiphase Flow박송환No ratings yet
- Transonic flutter analysis of rectangular wing using OpenFOAMDocument16 pagesTransonic flutter analysis of rectangular wing using OpenFOAMFurkan KesimNo ratings yet
- Turbulence Models in CFD: University of Ljubljana Faculty For Mathematics and Physics Department of PhysicsDocument18 pagesTurbulence Models in CFD: University of Ljubljana Faculty For Mathematics and Physics Department of PhysicsLes MilesNo ratings yet
- Physica Scripta 2007Document5 pagesPhysica Scripta 2007JOSE CARLOS LEON GONZALEZNo ratings yet
- Preprints201807 0548 v1Document12 pagesPreprints201807 0548 v1Naveen Prasad GopinathraoNo ratings yet
- A Generalized 3D Numerical Wave Tank For Practical Wave-Structure Interactions in Steep WavesDocument9 pagesA Generalized 3D Numerical Wave Tank For Practical Wave-Structure Interactions in Steep WaveslapuNo ratings yet
- SSRN Id4139073Document21 pagesSSRN Id4139073Fitness Stuff (FS)No ratings yet
- Comparative StudyDocument12 pagesComparative StudyAvinash VasudeoNo ratings yet
- Ying 2011 A PDFDocument6 pagesYing 2011 A PDFAngel CerriteñoNo ratings yet
- Theoretical Analysis of The No-Slip Boundary Condition Enforcement in SPH MethodsDocument31 pagesTheoretical Analysis of The No-Slip Boundary Condition Enforcement in SPH Methodslynettelmx111No ratings yet
- Calculation of Control Limits For The ChartDocument3 pagesCalculation of Control Limits For The ChartRobinson ANo ratings yet
- Kinetics of Phase Separation in Fluids: A Molecular Dynamics StudyDocument4 pagesKinetics of Phase Separation in Fluids: A Molecular Dynamics Studypreethim6462No ratings yet
- Macroscopic Arc Performance Models With Capacity Constraints For Within-Day Dynamic Traffic AssignmentDocument32 pagesMacroscopic Arc Performance Models With Capacity Constraints For Within-Day Dynamic Traffic Assignmentguido gentileNo ratings yet
- Parallel Computational Fluid Dynamics 2001, Practice and TheoryFrom EverandParallel Computational Fluid Dynamics 2001, Practice and TheoryP. WildersNo ratings yet
- Introductory Laplace Transform with ApplicationsFrom EverandIntroductory Laplace Transform with ApplicationsRating: 5 out of 5 stars5/5 (1)
- 1 s2.0 S0959440X2300012X MainDocument6 pages1 s2.0 S0959440X2300012X MainErsela ZainNo ratings yet
- 1 s2.0 S0888613X23000026 MainDocument15 pages1 s2.0 S0888613X23000026 MainErsela ZainNo ratings yet
- 1 s2.0 S0167739X22003028 MainDocument9 pages1 s2.0 S0167739X22003028 MainErsela ZainNo ratings yet
- UpwindDocument8 pagesUpwindErsela ZainNo ratings yet
- Numerical Methods Model ExamDocument2 pagesNumerical Methods Model ExamDineshkumarNo ratings yet
- Candidates Are Required To Give Their Answers in Their Own Words As Far As PracticableDocument7 pagesCandidates Are Required To Give Their Answers in Their Own Words As Far As PracticableBhanubhakta poudelNo ratings yet
- Lecture 02Document112 pagesLecture 02Atiq rifatNo ratings yet
- Game Theory Problems by An Alternative Simplex MethodDocument6 pagesGame Theory Problems by An Alternative Simplex MethodInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Advanced Engineering Math SolutionsDocument7 pagesAdvanced Engineering Math Solutionsblazinlyfe42No ratings yet
- Heat Transfer Enhancement by Using Dimpled Surface: Hemant C. Pisal, Avinash A. RanawareDocument9 pagesHeat Transfer Enhancement by Using Dimpled Surface: Hemant C. Pisal, Avinash A. Ranawareashoku2No ratings yet
- The Potential For Parallelism in Runge-Kutta Methods. Part 1: RK Formulas in Standard FormDocument34 pagesThe Potential For Parallelism in Runge-Kutta Methods. Part 1: RK Formulas in Standard Formjuanarcos_778612No ratings yet
- 2006 Unsaturated Soil Mechanics in Engineering PracticeDocument36 pages2006 Unsaturated Soil Mechanics in Engineering PracticeS R Kumar KonathalaNo ratings yet
- Solving Rational Equations and InequalitiesDocument27 pagesSolving Rational Equations and InequalitiesMailyka Faith I. PerezNo ratings yet
- MATLAB SolutionsDocument4 pagesMATLAB SolutionsAmeer Shamieh14% (7)
- Graduate Linear Algebra BookDocument4 pagesGraduate Linear Algebra BookStephenNo ratings yet
- SolverDocument32 pagesSolverARCHIT KUMARNo ratings yet
- (Vladimir Dorodnitsyn) Applications of Lie Groups (BookFi) PDFDocument346 pages(Vladimir Dorodnitsyn) Applications of Lie Groups (BookFi) PDFBorislav BrnjadaNo ratings yet
- Mathematical Programming - 2 Sessions-2 (CO1) Topic-Convex Optimization, Conic Programming, Linear Programming (LP)Document28 pagesMathematical Programming - 2 Sessions-2 (CO1) Topic-Convex Optimization, Conic Programming, Linear Programming (LP)Sai ChelamkuriNo ratings yet
- Problemm MathDocument15 pagesProblemm Mathqazed444No ratings yet
- Math Paper Class 9Document4 pagesMath Paper Class 9Mantu DasNo ratings yet
- Simplex Minimization ProblemDocument22 pagesSimplex Minimization ProblemShreyasKamatNo ratings yet
- David Lay Linear Algebra 4th Edition Chapter 9Document61 pagesDavid Lay Linear Algebra 4th Edition Chapter 9geko1100% (2)
- Interpolation TechniquesDocument22 pagesInterpolation TechniquesRudra DharNo ratings yet
- Add 5 digit numbers with min errorDocument1 pageAdd 5 digit numbers with min errorwhite angelNo ratings yet
- Mass lumping techniques equivalenceDocument57 pagesMass lumping techniques equivalenceSree SasthaNo ratings yet
- Complex NumbersDocument13 pagesComplex NumbersbirrajNo ratings yet
- BITS Pilani Hyderabad Math Assignment 1 Thomas Algorithm Gauss Seidel LU FactorizationDocument2 pagesBITS Pilani Hyderabad Math Assignment 1 Thomas Algorithm Gauss Seidel LU FactorizationTanishq DhanukaNo ratings yet
- Traveling Salesman Problem: A Case Study: Dr. Leena Jain Mr. Amit BhanotDocument3 pagesTraveling Salesman Problem: A Case Study: Dr. Leena Jain Mr. Amit BhanotmaddymahekNo ratings yet
- RGPV Syllabus Aicte BT 302 Mathematics 3 (Ce Me Ec)Document1 pageRGPV Syllabus Aicte BT 302 Mathematics 3 (Ce Me Ec)Akarsh PatelNo ratings yet
- skf2133 Chapter5nDocument26 pagesskf2133 Chapter5nsamandondonNo ratings yet
- Tikrit University College of EngineeringDocument12 pagesTikrit University College of EngineeringKarrar KarrarNo ratings yet
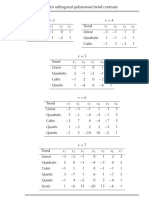
- Table A.2: Coefficients C For Orthogonal Polynomial Trend ContrastsDocument1 pageTable A.2: Coefficients C For Orthogonal Polynomial Trend ContrastsYONATAN STIVEN HOYOS SERNANo ratings yet
- MdobookDocument640 pagesMdobookThibault HugNo ratings yet
- 206C-Computer Based Optimization TechniquesDocument22 pages206C-Computer Based Optimization TechniquesRohit GNo ratings yet