You might also like
- ODE Cheat SheetDocument2 pagesODE Cheat SheetMuhammad Rizwan88% (8)
- Practice Problems For Modulus and Logarithm Section-I: FiitjeeDocument8 pagesPractice Problems For Modulus and Logarithm Section-I: FiitjeePratham SharmaNo ratings yet
- Ee206 4 PDFDocument70 pagesEe206 4 PDFali arshadNo ratings yet
- Partial Differential Equations: y Z X ZDocument4 pagesPartial Differential Equations: y Z X ZrootveshmehtaNo ratings yet
- Unit-5 Higher Order Partial Differential EquationDocument16 pagesUnit-5 Higher Order Partial Differential EquationRutvik JaniNo ratings yet
- Differential Equations - Linear Differential Equations - 2 PDFDocument26 pagesDifferential Equations - Linear Differential Equations - 2 PDFRicky PerezNo ratings yet
- MAS 201 Spring 2021 (CD) Differential Equations and ApplicationsDocument23 pagesMAS 201 Spring 2021 (CD) Differential Equations and ApplicationsBlue horseNo ratings yet
- Diff Equation 4 2011 Fall HIGH Order TheoryDocument56 pagesDiff Equation 4 2011 Fall HIGH Order TheoryAna CristacheNo ratings yet
- 05 Differential Equations - Linear Differential EquationsDocument30 pages05 Differential Equations - Linear Differential EquationsRemo Rubian Evangelista100% (1)
- ACFrOgBKZIAfR2 vuKBapmdmSmy7S5nMzwZoNNa d1SvFKmkxniQlslfvbk3p Y8oZRkeRvg3Wm94QapGxAfozfVFiN2ypAniIYmEfRGMX3e1C-89aXK-5in69LQKj8yHC9Ep08cREizyfvyf1wGDocument4 pagesACFrOgBKZIAfR2 vuKBapmdmSmy7S5nMzwZoNNa d1SvFKmkxniQlslfvbk3p Y8oZRkeRvg3Wm94QapGxAfozfVFiN2ypAniIYmEfRGMX3e1C-89aXK-5in69LQKj8yHC9Ep08cREizyfvyf1wGSunil DasNo ratings yet
- Advanced Mathematics - PDE PDFDocument32 pagesAdvanced Mathematics - PDE PDFAdelin FrumusheluNo ratings yet
- 6 5 Soft-JarnotesDocument7 pages6 5 Soft-JarnotesJesús Avalos RodríguezNo ratings yet
- MTH312 NotesDocument98 pagesMTH312 NotesAnmol PanchalNo ratings yet
- Methods of Solution of Selected Differential EquationsDocument7 pagesMethods of Solution of Selected Differential EquationsCHRISTINE NICOLE VICTORIONo ratings yet
- 6.homogeneous Linear Equations With Constant CoefficientsDocument26 pages6.homogeneous Linear Equations With Constant CoefficientsManpreet Singh100% (1)
- Unit-1 LDE Notes CivilDocument19 pagesUnit-1 LDE Notes CivilYashraj Kajave100% (1)
- ODE Mathematical PhysicsDocument9 pagesODE Mathematical PhysicsHow to do anything By HimanshuNo ratings yet
- Differential Equations Notes Chapters 1-3Document7 pagesDifferential Equations Notes Chapters 1-3bwahahahaNo ratings yet
- DEChapter 1Document16 pagesDEChapter 1Christian FranciscoNo ratings yet
- Engineering Analysis Homework 3Document3 pagesEngineering Analysis Homework 3AmritaNo ratings yet
- Mathematical Tripos Part IA 2009Document27 pagesMathematical Tripos Part IA 2009KaustubhNo ratings yet
- Note3 LECCDocument9 pagesNote3 LECCaadritadam2004No ratings yet
- Differential Equations: B. ShibazakiDocument27 pagesDifferential Equations: B. ShibazakiShyam AwalNo ratings yet
- DEText Ch20Document8 pagesDEText Ch20AYUSHI SOMANINo ratings yet
- Unexpected Applications of Mean Value Theorem(s)Document5 pagesUnexpected Applications of Mean Value Theorem(s)Alexander MarinovNo ratings yet
- Chapter 03 Higher Order Linear ODEsDocument10 pagesChapter 03 Higher Order Linear ODEsSider HsiaoNo ratings yet
- Prelims Introductory Calculus 2012MTDocument22 pagesPrelims Introductory Calculus 2012MTMaoseNo ratings yet
- MTH 203Document15 pagesMTH 203shayandevNo ratings yet
- Sec 4-7Document15 pagesSec 4-7FlorinNo ratings yet
- Summary 1Document7 pagesSummary 1Abdalmalek shamsanNo ratings yet
- PDFDocument9 pagesPDFAmorette ChiossiNo ratings yet
- Linear Differential EquationsDocument31 pagesLinear Differential EquationsWASEEM_AKHTER100% (1)
- Differential Equations LecturesDocument12 pagesDifferential Equations Lecturesabbasovn2005No ratings yet
- Formula SheetDocument4 pagesFormula Sheetkidopit906No ratings yet
- Linear Transformations: N M N NDocument15 pagesLinear Transformations: N M N NJose Luis GiriNo ratings yet
- Higher Order Linear Differential Equations: Math 240 - Calculus IIIDocument25 pagesHigher Order Linear Differential Equations: Math 240 - Calculus IIISadek AhmedNo ratings yet
- Higher Order Linear Differential Equations: Math 240 - Calculus IIIDocument25 pagesHigher Order Linear Differential Equations: Math 240 - Calculus IIISadek AhmedNo ratings yet
- Final ESE Formula Sheet (MA-644)Document26 pagesFinal ESE Formula Sheet (MA-644)Umar AnjumNo ratings yet
- Lesson 31 Linear Differential Equation of Higher Order: Module 3: Ordinary Differential EquationsDocument6 pagesLesson 31 Linear Differential Equation of Higher Order: Module 3: Ordinary Differential EquationsJoseph NjugunaNo ratings yet
- Chapter 5 Higher Order EquationsDocument8 pagesChapter 5 Higher Order EquationsMehmet Akif KözNo ratings yet
- Chapter 2Document39 pagesChapter 2Muhd RzwanNo ratings yet
- Chapter 4-1 MergedDocument67 pagesChapter 4-1 MergedMuhd RzwanNo ratings yet
- Ordinary Differential Equation2008Document70 pagesOrdinary Differential Equation2008Tedros AssefaNo ratings yet
- 4Document16 pages4DAVIDNo ratings yet
- Notes For Diffrentai EquationsDocument10 pagesNotes For Diffrentai EquationsAksyNo ratings yet
- UCL Notes On 1st Order PDEsDocument9 pagesUCL Notes On 1st Order PDEsIslam Iman Dan IhsanNo ratings yet
- 1 N N 1 M, N: Math 171, Spring 2010 Henry AdamsDocument4 pages1 N N 1 M, N: Math 171, Spring 2010 Henry AdamsUna RadojicicNo ratings yet
- Linear PdeDocument23 pagesLinear PdeA SinghNo ratings yet
- Differential Equations Notes: Author Vincent HuangDocument16 pagesDifferential Equations Notes: Author Vincent HuangVincent HuangNo ratings yet
- Linear PDE With Constant Coefficients: Pinaki PalDocument54 pagesLinear PDE With Constant Coefficients: Pinaki PalKingshuk MukherjeeNo ratings yet
- Exact EquationsDocument6 pagesExact EquationsThēøś :3No ratings yet
- Legendre Equation ProblemsDocument2 pagesLegendre Equation ProblemsShahbaz AhmedNo ratings yet
- Lecture 4 Supplemental Notes, Electromagnetic Theory I: Step 1: Write Down The Boundary ConditionsDocument8 pagesLecture 4 Supplemental Notes, Electromagnetic Theory I: Step 1: Write Down The Boundary ConditionsAfzaalNo ratings yet
- IIT Kanpur PHD May 2017Document5 pagesIIT Kanpur PHD May 2017Arjun BanerjeeNo ratings yet
- FODE 4 LecturesDocument32 pagesFODE 4 LecturesZaid PeroNo ratings yet
- Differential Equations LecturesDocument13 pagesDifferential Equations LecturesRauliumNo ratings yet
- Lecture Notes On Ordinary Differential EquationsDocument64 pagesLecture Notes On Ordinary Differential EquationsLaibaNo ratings yet
- Ma5355 Ttpde Unit 1 Class 4Document37 pagesMa5355 Ttpde Unit 1 Class 4Karunambika ArumugamNo ratings yet
- Differential Equations MA103Document3 pagesDifferential Equations MA103Sanjoy BrahmaNo ratings yet
- Lecture 12: Solutions For Equations With Constants Coefficients (Ii)Document5 pagesLecture 12: Solutions For Equations With Constants Coefficients (Ii)Serdar BilgeNo ratings yet
- Laws of ExponentsDocument30 pagesLaws of ExponentsAndi IremedioNo ratings yet
- PT Mathematics-2 Q3Document9 pagesPT Mathematics-2 Q3mirasolNo ratings yet
- N2-7 CF Operations 2Document6 pagesN2-7 CF Operations 2Lala JafarovaNo ratings yet
- A. Four OperationsDocument14 pagesA. Four OperationsMahir RahmanNo ratings yet
- CSC Techniques in Numerical Reasoning TestDocument3 pagesCSC Techniques in Numerical Reasoning TestMay Ann GervacioNo ratings yet
- Number SystemsDocument50 pagesNumber SystemsBipasha Biswas MallickNo ratings yet
- Ch.9 DifferentiationDocument1 pageCh.9 DifferentiationNikitha SomaratneNo ratings yet
- CH 8 Test 2022Document4 pagesCH 8 Test 2022venzonguyen9No ratings yet
- Grade 5 Math MelcDocument2 pagesGrade 5 Math MelcHelene Grace Mamuad LachicaNo ratings yet
- Teaching Mathematics in The Primary Grades: Katrina M. MatociñosDocument27 pagesTeaching Mathematics in The Primary Grades: Katrina M. MatociñosGeralyn SeptimoNo ratings yet
- Multiplying Decimal NumbersDocument14 pagesMultiplying Decimal Numbersmarie cristian mae paminsanNo ratings yet
- Math Reviewer 2Document4 pagesMath Reviewer 2Kristine PinpinNo ratings yet
- R.5 Day2 Multiplying and Dividing Rational ExpressionsDocument17 pagesR.5 Day2 Multiplying and Dividing Rational ExpressionsSafi KwaiderNo ratings yet
- Grade 6 - DAMMATH MaterialDocument12 pagesGrade 6 - DAMMATH MaterialJeff Loyd BERGONIANo ratings yet
- 1.5 Inverse Functions & LogarithmsDocument11 pages1.5 Inverse Functions & Logarithms郭大維No ratings yet
- 2nd PT in Math 3 2018 Famy MabitacDocument5 pages2nd PT in Math 3 2018 Famy MabitacAnonymous ZLS4QBxT100% (1)
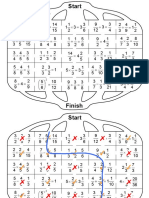
- Fractions MazeDocument9 pagesFractions MazeDavid KotutNo ratings yet
- PT 2 Class 5 MathDocument3 pagesPT 2 Class 5 Mathsrbs schoolNo ratings yet
- REXODAS MATHEMATICS Number System - ClassRoom SheetDocument14 pagesREXODAS MATHEMATICS Number System - ClassRoom SheetSOUMYA BHATTNo ratings yet
- CL 5 Winter Holiday H.WDocument4 pagesCL 5 Winter Holiday H.WKunal DuttaNo ratings yet
- Resistor E Series - E3, E6, E12, E24, E48, E96 TablesDocument3 pagesResistor E Series - E3, E6, E12, E24, E48, E96 TablesLuiz Clemente PimentaNo ratings yet
- 8 MultipliersDocument95 pages8 MultipliersTanuj KumarNo ratings yet
- MATH 3 2ND QUARTER LAS - EthelmaguilarDocument36 pagesMATH 3 2ND QUARTER LAS - EthelmaguilarJohn Harzel Naga100% (1)
- 9 Bfad 6Document14 pages9 Bfad 6Patrick TangNo ratings yet
- Activity Sheet Math 4 Q1Document17 pagesActivity Sheet Math 4 Q1Lhea Joy T. CiprianoNo ratings yet
- Mth517 WK 10 Matlab: Differential CalculusDocument2 pagesMth517 WK 10 Matlab: Differential CalculusShavin ChandNo ratings yet
- Partial Differential EquationsDocument90 pagesPartial Differential EquationsِAhmed Jebur Ali100% (1)
- Basiccalculus q3 Mod10 Chainrule FinalDocument20 pagesBasiccalculus q3 Mod10 Chainrule FinalEunice Paul100% (3)
- Class 4 Week 26 Math AssignmentsDocument5 pagesClass 4 Week 26 Math AssignmentsAbhigyan Mohan AgarwalNo ratings yet