Professional Documents
Culture Documents
Phase I Benchmark Control Problem For Seismic Response of Cable-Stayed Bridges
Uploaded by
Abdul Monish SheikhOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Phase I Benchmark Control Problem For Seismic Response of Cable-Stayed Bridges
Uploaded by
Abdul Monish SheikhCopyright:
Available Formats
Phase I Benchmark Control Problem for Seismic Response
of Cable-Stayed Bridges
S. J. Dyke1; J. M. Caicedo2; G. Turan3; L. A. Bergman4; and S. Hague5
Abstract: This paper presents the problem definition for the first generation of benchmark structural control problems for cable-stayed
bridges. The benchmark problem is based on the Bill Emerson Memorial Bridge that is currently under construction in Cape Girardeau,
Missouri. Construction of the bridge is expected to be completed in 2003. The goal of this study is to provide a testbed for the
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
development of strategies for the control of cable-stayed bridges. Based on detailed drawings, a three-dimensional evaluation model has
been developed to represent the complex behavior of the full scale benchmark bridge. The linear evaluation model is developed using the
equations of motion generated around the deformed equilibrium position. Evaluation criteria are selected that are consistent with the goals
of seismic response control of a cable-stayed bridge. Control constraints ensure that the results are representative of a control implemen-
tation on the physical structure. Each participant in this benchmark study is given the task of defining 共including devices, sensors, and
algorithms兲, evaluating, and reporting on their proposed control strategies. These strategies may be either passive, active, semiactive, or
a combination thereof. A simulation program is provided to facilitate direct comparison of the capabilities and efficiency of the various
control strategies. The problem is available through the internet in the form of a set of MATLAB® programs and includes a sample control
design to guide participants through the benchmark problem.
DOI: 10.1061/共ASCE兲0733-9445共2003兲129:7共857兲
CE Database subject headings: Benchmarks; Seismic response; Bridge, cable-stayed; Control methods; Missouri.
Introduction searchers reported their results for this problem at the 1997 ASCE
In recent years, benchmark problems have been recognized as a Structures Congress, held in Portland, Oregon. Subsequently, a
means to compare and contrast various structural control strate- special issue of Earthquake Engineering and Structural Dynamics
gies 共Caughey 1998兲. Benchmark structural control problems was devoted to the results of this benchmark problem. During the
allow researchers to apply various algorithms, devices, and sen- Second International Workshop on Structural Control, held in
sors to a specified problem and make direct comparisons of the Hong Kong 共Chen 1996兲, working groups were formed to plan
results in terms of a specified set of performance objectives. Ad- the development of a series of benchmark control problems for
ditionally, these problems may include control constraints and various classes of civil engineering structures. Two of these work-
hardware models to more accurately portray the types of imple- ing groups concentrated on building structures, and one focused
mentation issues and constraints one must consider in reality. on long-span bridge structures. Subsequently, from the working
All of the benchmark problems considered so far have focused groups on building systems, second 共Spencer et al. 1998b; Yang
on the control of buildings. The first generation benchmark prob- et al. 1998兲 and third 共Ohton et al. 2003, Yang et al. 2003兲 gen-
lem provided a comparison of control algorithms for seismically eration benchmark control problems buildings were developed.
excited laboratory scale buildings 共Spencer et al. 1998a兲. Re- The working group on bridge control recognized that the con-
trol of flexible bridge structures represents a new, difficult, and
1
Associate Professor, Dept. of Civil Engineering, Washington Univ., unique problem, with many complexities in modeling, control
St. Louis, MO 63130 共corresponding author兲. E-mail: design, and implementation. Cable-stayed bridges exhibit com-
sdyke@seas.wustl.edu plex behavior in which the vertical, translational, and torsional
2
Graduate Research Assistant and Doctoral Candidate, Dept. of Civil
motions are often strongly coupled. Clearly, the control of very
Engineering, Washington Univ., St. Louis, MO 63130.
3
Assistant Professor, Dept. of Civil Engineering, Izmir Institute of flexible bridge structures has not been studied to the same extent
Technology, Izmir, Turkey; formerly, Doctoral Student, Dept. of Civil as buildings have. As a result, little expertise has been accumu-
Engineering, Univ. of Illinois, Urbana, IL 61801. lated. Thus, the control of seismically excited cable-stayed
4
Professor, Dept. of Aeronautical Engineering, Univ. of Illinois, Ur- bridges presents a challenging problem to the structural control
bana, IL 61801. community.
5
Associate Vice President, HNTB Corporation, 715 Kirk Drive, Kan- An analytical feasibility study was performed on a well-
sas City, MO 64105.
studied and documented bridge model to identify and resolve im-
Note. Associate Editor: Billie F. Spencer Jr. Discussion open until
December 1, 2003. Separate discussions must be submitted for individual portant issues associated with the control of a flexible bridge
papers. To extend the closing date by one month, a written request must 共Schemmann et al. 1998兲. Subsequently, a benchmark problem on
be filed with the ASCE Managing Editor. The manuscript for this paper the control of cable-stayed bridges was initiated. The benchmark
was submitted for review and possible publication on March 5, 2002; problem is based on the cable-stayed bridge currently under con-
approved on March 5, 2002. This paper is part of the Journal of Struc- struction in Cape Girardeau, Missouri. Instrumentation is being
tural Engineering, Vol. 129, No. 7, July 1, 2003. ©ASCE, ISSN 0733- installed in the Emerson bridge and surrounding soil during the
9445/2003/7-857– 872/$18.00.
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 857
J. Struct. Eng., 2003, 129(7): 857-872
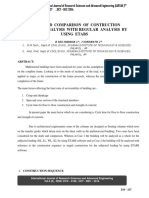
Fig. 1. Drawing of Emerson bridge
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
construction to evaluate structural behavior and seismic risk Earthquake load combinations in accordance with American As-
共Çelebi 1999兲. sociation of State Highway and Transportation Officials
This paper presents the problem definition for the first genera- 共AASHTO兲 division I-A specifications were used in the design.
tion benchmark structural control problem for cable-stayed Various designs were considered, including full longitudinal re-
bridges. The goal of this study is to provide a testbed for the straint at the tower piers, no longitudinal restraint, and passive
development of strategies for the effective control of these isolation. When temperature effects were investigated, it was
bridges. Based on detailed drawings of the Emerson bridge, a found that fully restraining the deck in the longitudinal direction
three-dimensional evaluation model was developed to represent would result in unacceptably large stresses. Based on examination
the complex behavior of the full scale benchmark bridge. A linear of the various designs, it was determined that incorporating force
evaluation model, using the equations of motion generated around transfer devices would provide the most efficient solution.
the deformed equilibrium position, is deemed appropriate. Be- Sixteen 6.67 MN 共1,500 kip兲 shock transmission devices are
cause the structure is attached to bedrock, the effects of soil- employed in the connection between the tower and the deck.
structure interaction are neglected. The ground acceleration is ap- These devices are installed in the longitudinal direction to allow
plied longitudinally and acts simultaneously at all supports. To for expansion of the deck due to temperature changes. Under
evaluate the proposed control strategies in terms that are mean- dynamic loads these devices are extremely stiff and are assumed
ingful for cable-stayed bridges, appropriate evaluation criteria and to behave as rigid links. Additionally, earthquake restrainers are
control design constraints are specified within the problem state-
employed in the transverse direction at the connection between
ment. Designers/researchers participating in this benchmark study
the towers and the deck, and the deck is restrained in the vertical
will define all devices, sensors, and control algorithms used,
direction at the towers. The bearings at Bent 1 and Pier 4 are
evaluate them in the context of their proposed control strategies,
designed to permit longitudinal displacement and rotation about
and report the results. These strategies may be passive, active,
the transverse and vertical axis. Soil-structure interaction is not
semiactive, or a combination thereof. The problem will be made
expected to be significant in this bridge as the foundations of the
available for downloading on the benchmark web site in the form
of a set of MATLAB® equations 具http://wusceel.cive.wustl.edu/ cable-stayed portion is attached to bedrock.
quake/典. A sample control design is included. As shown in Fig. 1, the bridge is composed of two towers, 128
cables, and 12 additional piers in the approach bridge from the
Illinois side. It has a total length of 1205.8 m. The main span is
Benchmark Cable-Stayed Bridge 350.6 m in length, the side spans are 142.7 m in length, and the
approach on the Illinois side is 570 m. A cross section of the deck
The cable-stayed bridge used for this benchmark study is the Bill is shown in Fig. 2. The bridge has four lanes plus two narrower
Emerson Memorial Bridge spanning the Mississippi River 共be- bicycle lanes, for a total width of 29.3 m. The deck is composed
tween Missouri 74-Illinois 146兲 near Cape Girardeau, Missouri, of steel beams and prestressed concrete slabs. Steel ASTM A709
designed by the HNTB Corporation 共Hague 1997兲. Seismic con- grade 50W is used, with an f y of 344 MPa 共50 ksi兲. The concrete
siderations were strongly considered in the design of this bridge slabs are made of prestressed concrete with a f ⬘c of 41.36 MPa 共6
due to the location of the bridge 共the New Madrid seismic zone兲 ksi兲.
and its critical role as a principal crossing of the Mississippi The 128 cables are made of high-strength, low-relaxation steel
River. In the early stages of the design process, the loading case 共ASTM A882 grade 270兲. The cables are covered with a polyeth-
governing the design was determined to be due to seismic effects. ylene piping to resist corrosion. The H-shaped reinforced concrete
Fig. 2. Cross section of bridge deck
858 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng., 2003, 129(7): 857-872
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
Fig. 3. Cross sections of towers
towers have a height of 102.4 m at Pier 2 and 108.5 m at Pier 3. as the evaluation model, and the control devices should connect
Each tower supports a total of 64 cables. The cross section of the deck to the tower. As one would expect, the frequencies of
each tower varies five times over the height of the tower, as this model are much lower than those of the nominal bridge
shown in Fig. 3. The deck consists of a rigid diaphragm made of model. The first ten frequencies of this second model are 0.1618,
steel with a slab of concrete at the top. 0.2666, 0.3723, 0.4545, 0.5015, 0.5650, 0.6187, 0.6486, 0.6965,
and 0.7094 Hz. Note that the uncontrolled structure used as a
basis of comparison for the controlled system, corresponds to the
Evaluation Model former model in which the deck-tower connections are fixed 共the
dynamically stiff shock transmission devices are present兲.
Based on the description of the Emerson bridge provided in the
previous section, a three-dimensional finite-element model of the
Description of Finite-Element Model
bridge was developed in MATLAB® 共1997兲. A linear evaluation
model is used in this benchmark study. However, the stiffness The finite-element model 共FEM兲, shown in Fig. 4, has a total of
matrices used in this linear model are those of the structure de- 579 nodes, 420 rigid links, 162 beam elements, 134 nodal masses,
termined through a nonlinear static analysis corresponding to the and 128 cable elements. The towers are modeled using 50 nodes,
deformed state of the bridge with dead loads 共Wilson and 43 beam elements, and 74 rigid links. Constraints are applied to
Gravelle 1991兲. Additionally, the bridge is assumed to be attached restrict the deck from moving laterally at Piers 2, 3, and 4.
to bedrock, and the effects of soil-structure interaction are ne- Boundary conditions restrict the motion at Bent 1 to allow longi-
glected. A one-dimensional ground acceleration is applied in the tudinal displacement 共X兲 and rotations about the Y and Z axes.
longitudinal direction. This direction is considered to be the most Because the attachment points of the cables to the deck are above
destructive in cable-stayed bridges. the neutral axis of the deck, and the attachment points of the
The finite-element model employs beam elements, cable ele- cables to the tower are outside the neutral axis of the tower, rigid
ments, and rigid links. The nonlinear static analysis is performed links are used to connect the cables to the tower and to the deck
in ABAQUS® 共1998兲, and the element mass and stiffness matrices 共see Fig. 5兲. The use of rigid links ensures that the length and
are output to MATLAB® for assembly. Subsequently, the con- inclination angle of the cables in the model agree with the draw-
straints are applied, and a reduction is performed to reduce the ings. Additionally, the moment induced in the towers by the
size of the model to something more manageable. These steps are movement of the cables is taken into consideration with this ap-
described in the following sections. The first ten frequencies of proach. In the case of variable sections, the average of the section
the evaluation model are 0.2899, 0.3699, 0.4683, 0.5158, 0.5812, is used for the finite element. The cables are modeled with truss
0.6490, 0.6687, 0.6970, 0.7102, and 0.7203 Hz. elements. In the finite-element model the nominal tension is as-
To make it possible for designers/researchers to place devices signed to each cable.
acting longitudinally between the deck and the tower, a modified The FEM model described above is used directly in cases
evaluation model is formed in which the connections between the when the control devices are employed in the longitudinal direc-
tower and the deck are disconnected. If a designer/researcher tion between the deck and tower. If the designer/researcher em-
specifies devices at these nodes, the second model will be formed ploys no control device at these locations 共in which case the
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 859
J. Struct. Eng., 2003, 129(7): 857-872
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
Fig. 4. Finite-element model
shock transmission devices are included兲, the model is modified commercial finite-element program ABAQUS®, giving the model
by including four longitudinally directed, axially stiff beam ele- tangent stiffness matrix at the 共deformed兲 equilibrium position. In
ments that force the deck to move with the tower in the longitu- ABAQUS®, the B31 beam element was used for the structural
dinal direction. The uncontrolled structure used as a basis of com- beam element, and the element T3D2 was used for the cable
parison corresponds to this second case. Note that the program elements.
included with the benchmark files determines if the designer/ In modeling the cables, the catenary shape and its variation
researcher has placed devices in this location and builds the ap- with the axial force in the cable are modeled using an equivalent
propriate FEM model. elastic modulus 共Ernst 1965兲. The cable element is a large-
Note that the Illinois approach is not included in this model displacement truss element that has a modified modulus of elas-
because the bearing at Pier 4 does not restrict longitudinal motion ticity E eq given by
and rotation about the X axis of the bridge, and the Illinois ap-
proach has a negligible effect on the dynamics of the cable-stayed Ec
冋 册
E eq⫽ (1)
portion of the bridge. 共 wL x 兲 2 A c E c
1⫹
12T 3c
Nonlinear Static Analysis
where A c ⫽area of the cross section; T c ⫽tension in the cable;
Cable-stayed bridges exhibit nonlinear behavior due to variations w⫽unit weight, L x ⫽projected length in the X-Z plane; and E c
of the catenary shape of the inclined cables, cable tensions that ⫽modulus of elasticity of the material. The cable stiffness con-
induce compression forces in the deck and towers, and large dis- tribution to the global stiffness matrix is only applied when the
placements. A nonlinear static analysis was performed using the cable is under tension and is omitted otherwise. The cable ele-
Fig. 5. Finite-element model of towers
860 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng., 2003, 129(7): 857-872
tray the behavior of the C-shaped section, the deck is represented
as two lumped masses, each having a mass equal to half of the
total deck mass, joined to the beam element by a rigid link as
shown in Fig. 6. The vertical distance between the lumped mass
and the center of the beam is equal to the distance between the
shear center and the mass center of the C-shaped section.
Because the mass moment of inertia of the main deck is dif-
Fig. 6. Finite-element modeling of cross section of deck ferent than the one induced by the lumped masses, it is necessary
to make corrections to those quantities. In the calculation, the
correction consists of finding the difference between the mass
ments are modeled as truss elements in ABAQUS®, and their moment of inertia of the lumped masses and that of the actual
equivalent elastic moduli are used in the nonlinear static analysis. deck section’s mass moment of inertia. This difference in the
The deck was modeled using the method described by Wilson mass moment of inertia is added to the node at the center of the
and Gravelle 共1991兲. In this approach the deck is modeled as a deck to achieve the correct value of mass moment of inertia in the
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
central beam 共the spine兲 which has no mass. Lumped masses are section model. The mass moment of inertia of the lumped masses
employed to model the mass of the deck, which are connected to with respect to the jth axis 共either the X, Y, or Z axis兲, I j , is
the spine using rigid links 共see Fig. 6兲. The masses are included to calculated using the formula
more realistically model the torsional response of the deck to
lateral loads, and have been shown to be important in the model- I j ⫽2M l r 2 (5)
ing of this structure 共Caicedo et al. 2000兲.
where M l ⫽mass of each lumped mass and r⫽perpendicular dis-
The deck is comprised of two main steel girders along each
longitudinal edge of the deck supporting the concrete slab 共see tance from the mass to each axis. The actual mass moment of
Fig. 2兲. Thus, the deck is treated as a C-shaped section 共Wilson inertia of the deck with respect to the jth axis I m j is calculated
and Gravelle 1991兲. The steel beams are represented by the using
flanges, and the concrete slab is represented by the web. The axial n
stiffness of the deck is calculated by converting the area of the
concrete slab into an equivalent area 共1.844 m2兲 of steel using the
Im j⫽ 兺 共 I mi ⫹m i r i2 兲
i⫽1
(6)
ratio of the two elastic moduli. The moments of inertia about the
vertical and transverse axes are also obtained converting the con- where I mi ⫽mass moment of inertia of each of the component of
crete slab to an equivalent steel structure. The inertia of the typi- the deck with respect to its own centroidal axis; m i ⫽mass of each
cal deck section has values of I y y ⫽160.67 m4 , I zz ⫽0.6077 m4 , component; and r i ⫽perpendicular distance between the centroid
and J eq⫽0.0677 m4 . The neutral axis is located at 1.77 m above of each component and the jth axis. Thus, the corrected mass
the bottom of the steel beams. moment of inertia of the section becomes
The calculation of the torsional stiffness of the deck section
takes into consideration both pure and warping torsional con- ⌬ j ⫽I m j ⫺I j (7)
stants. The pure torsion constant is determined by 共Wilson and The value of this parameter about each axis for a typical section
Gravelle 1991兲
of the deck are ⌬ X ⫽⫺4.43•106 kg m2 , ⌬ Y ⫽⫺4.45•106 kg m2 ,
n
b i t i3 and ⌬ Z ⫽18.3•103 kg m2 . Negative values indicate that the con-
J t⫽ 兺
i⫽1 3
(2) tribution of the lumped masses to the mass moment of inertia of
the section is larger than the mass moment of inertia of the actual
where b i and t i ⫽length and thickness of thin sections which section. Thus, a negative value is assigned to the spine to balance
make up the deck cross section. The warping constant is calcu- the larger value included by the lumped masses when the rigid
lated as 共Bleich 1952兲 links are condensed out.
再 冉 冊冎
d2 d 2A The element mass and tangent stiffness matrices generated in
⌫ w⫽ I zz ⫹e 2 A 1⫺ (3) ABAQUS® are summed at each node to assemble the global stiff-
4 4I y y
ness and mass matrices within MATLAB®. The equations are par-
where d⫽distance between the webs of the two steel beams lo- titioned into active and constrained degrees of freedom 共DOFs兲,
cated along the edges of the deck; e⫽distance between the neu- and constraints were applied by eliminating the rows and columns
tral axis and the middle of the concrete slab; and A⫽equivalent associated with fixed boundary conditions, and by condensing out
cross sectional area. I y y and I zz ⫽moments of inertia of the deck rigid links 共applying kinematic constraints兲. The resulting model
about the Y and Z axes, as determined previously. The torsional has 909 DOFs. The equation of motion for the undamped struc-
stiffness of the deck was obtained using the formula 共Wilson and tural system is
Gravelle 1991兲
冋 册
E s⌫ w 2 MÜ⫹KU⫽⫺M⌫ẍ g ⫹⌳f (8)
G s J eq⫽G s J⫹ (4)
G sL 2 where Ü⫽second time derivative of the response vector U; M
where G s ⫽steel shear modulus of elasticity; J eq⫽equivalent tor- and K⫽mass and stiffness matrices of the structure; f (N)
sional constant; J⫽pure torsion constant; E s ⫽modulus of elastic- ⫽vector of control force inputs; ẍ g (m/sec2 )⫽longitudinal
ity of steel; and L⫽length of the main span. ground acceleration; ⌫⫽vector of zeros and ones relating the
Calculation of the mass of the deck considers the steel beams, ground acceleration to the bridge DOFs in the longitudinal direc-
rigid concrete slab, barriers, and railings. The total mass of the tion of the bridge; and ⌳⫽vector defining how the force共s兲 pro-
deck per unit length was determined to be 2,645.7 kg/m. To por- duced by the control device共s兲 enter the structure.
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 861
J. Struct. Eng., 2003, 129(7): 857-872
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
Fig. 7. Representative mode shapes of bridge evaluation model
Model Reduction Analysis Tool
The model resulting from the finite-element formulation has a The linear model of the bridge system is simulated using a ver-
large number of degrees-of-freedom and high-frequency dynam- sion of the analysis tool developed by Ohtori and Spencer 共1999兲
ics. Thus, some assumptions are made regarding the behavior of for linear systems. This tool allows the user to implement the
the bridge to make the model more manageable for dynamic compiled C code from within the MATLAB® environment through
simulation while retaining the fundamental behavior of the a SIMULINK® 共1997兲 block to simulate the responses of a seis-
bridge. The active DOF retained in the model include: 共1兲 the mically excited structural system. This tool solved the incremen-
nodes at the top of each tower; 共2兲 the lowest nodes at which tal equations of motion using the Newmark- method in combi-
cables are connected on each tower; 共3兲 nodes at the joints of the nation with the pseudo-force method. To use the code, one must
towers; 共4兲 nodes or DOFs of elements whose shear and overturn- define the mass, stiffness, and damping matrices for the evalua-
ing moments are among the design criteria; 共5兲 approximately tion structure 关 M̂, Ĉ, and K̂ in Eq. 共9兲兴, as well as the matrices
every third node of the bridge deck; and 共6兲 rotational DOFs defining the inputs and outputs of the structural system. The input
about the longitudinal and vertical axis of all spinal deck nodes. and output matrices are found using the state space form of Eq.
These locations are indicated in the finite-element model in 共9兲 given by
Fig. 4.
Static condensation is performed by partitioning the mass and
stiffness matrices into active and dependent DOF, determining the
ẋ⫽Ae x⫹Be f冋册ẍ g
y⫽Ce x⫹De f 冋册
ẍ g
(10)
static transformation matrix, and finding the transformed mass, ˙ T 兴 T ⫽state vector; A ⫽state matrix; and B , C ,
where x⫽ 关 ÛT Û e e e
stiffness, and input coefficient matrices, as discussed by Craig and De ⫽determined by the inputs and outputs selected by the
共1981兲. Application of this reduction scheme to the full model of designer/researcher.
the bridge resulted in a 419 DOF reduced order model. The first
100 natural frequencies of the reduced model 共up to 3.5 Hz兲 are in Control Design Problem Statement
good agreement with those of the 909 DOF structure. As stated previously the researcher/designer must define the sen-
The damping in the system is defined based on the assumption sors, devices, and algorithms to be used in his/her control strat-
of modal damping. The damping matrix was developed by assign- egy. These must be defined in specific forms to properly interface
ing 3% of critical damping to each mode. This value was selected with the benchmark bridge model. The sensors and control de-
to be consistent with assumptions made during the design of the vices interface with the bridge model through measurement and
bridge. The resulting equation of motion for the damped structural connection outputs, designated ym and yc , respectively. Addition-
system is ally participants define the components of the evaluation output
¨ ⫹ĈÛ
˙ ⫹K̂Û⫽⫺⌫ˆ ẍ ⫹⌳
ˆf vector, designated ye . The components of ym , yc , and ye are
M̂Û g (9)
specified within an input/output file provided with the benchmark
where Û⫽displacement vector of active DOFs. This model is problem statement. A MATLAB® graphical user interface is pro-
termed the evaluation model. It is considered to portray the actual vided to simplify this procedure. However, this information can
dynamics of the bridge and will be used to evaluate various con- be directly inserted into the input/output file as well.
trol systems. Note that this model always includes the effects of
Control System Components
the shock transmission devices, which constrain longitudinal mo-
tion. The evaluation model and earthquake inputs are fixed for The sensors must be defined to measure the outputs of the evalu-
this benchmark problem. A representative sample of the mode ation model. Researchers/designers must develop models for the
shapes is shown in Fig. 7. sensors which must take the following form:
862 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng., 2003, 129(7): 857-872
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
Fig. 8. SIMULINK® model for benchmark cable-stayed bridge problem
ẋs ⫽g1 共 xs ,ym ,y f ,t 兲 (11) allows designers/researchers to place control devices at con-
strained nodes although errors will result in the simulated re-
ys ⫽g2 共 xs ,ym ,y f ,t 兲 (12) sponses. To interface with the benchmark bridge model the con-
where x ⫽continuous-time state vector of the sensor共s兲; and ys
s trol device model共s兲 must take the form
⫽continuous-time output of the sensor共s兲 关Volts兴. y f is the
continuous-time output vector from the control device model 关see f⫽g5 共 yc ,uk ,t 兲 (15)
Eqs. 共17–19兲兴, which may include forces produced by individual
control devices, device stroke, device acceleration, is used for y f ⫽g6 共 yc ,uk ,t 兲 (16)
evaluation of the control strategy and is available for feed-back in where yc contains the continuous-time responses from the evalu-
the control algorithm. ation model that influence the control forces and f
Passive, active, and semiactive control devices 共or combina-
⫽continuous-time force output of the control device共s兲 applied to
tions thereof兲 may be used in designing control systems. For
the structure 共in units of 关kN兴兲. Researchers/designers who choose
active/semiactive control systems, the associated discrete-time
to employ dynamic models of their control devices should use the
control algorithm must take the form
form
xck⫹1 ⫽g3 共 xck ,ysk ,k 兲 (13)
ẋd ⫽g7 共 xd ,yc ,uk ,t 兲 (17)
uk ⫽g4 共 xck ,ysk ,k 兲 (14)
f⫽g8 共 xd ,yc ,uk ,t 兲 (18)
where xck ⫽discrete-time state vector of the control algorithm at
each sampling time t⫽kT; ysk ⫽discrete-time input to the control y f ⫽g9 共 xd ,yc ,uk ,t 兲 (19)
algorithm from the sensors 关which should be discretized in time
and quantized to represent an analog to digital 共A/D兲 converter兴;
and uk ⫽discrete-time control command from the control algo- where xd is the continuous-time state vector of the control device.
rithm. Fig. 8 provides the SIMULINK® model used for evaluation of
Dynamic models of the control devices selected by the proposed control strategies. Designers/researchers should follow
researcher/designer are not required for this benchmark study. the procedure summarized in Fig. 9 to develop and evaluate their
Ideal control devices may be assumed. Note that the program designs.
Fig. 9. Flow chart of benchmark solution procedure
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 863
J. Struct. Eng., 2003, 129(7): 857-872
Table 1. Uncontrolled Maximum Responses for Performance Criteria Calculations
Response Definition El Centro, U.S.A. Mexico City, Mexico Gebze, Turkey
max
F 0b 共kN兲 max兩F0bi共t兲兩 4.8782e⫹4 1.1181e⫹4 3.0848e⫹4
i,t
max
F 0d 共kN兲 max兩F0di共t兲兩 4.6712e⫹3 1.5248e⫹3 3.1497e⫹3
i,t
max
M 0b 共kN m兲 max兩M 0bi共t兲兩 1.0271e⫹6 1.9824e⫹5 6.9779e⫹5
i,t
max
M 0d 共kN m兲 max兩M 0di共t兲兩 2.2054e⫹5 8.6701e⫹4 1.0927e⫹5
i,t
x 0b 共m兲 max兩x0bi共t兲兩 9.7583e⫺2 2.4324e⫺2 7.1916e⫺2
i,t
储 F 0b (t) 储 共kN兲 max储Fbi共t兲储 5.2647e⫹3 1.4741e⫹3 2.6088e⫹3
i
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
储 F 0d (t) 储 共kN兲 max储Fdi共t兲储 4.5607e⫹2 1.889e⫹2 2.3124e⫹2
i
储 M 0b (t) 储 共kN m兲 max储M bi共t兲储 1.1628e⫹5 3.1467e⫹4 5.7793e⫹4
i
储 M 0d (t) 储 共kN m兲 max储M di共t兲储 2.0128e⫹4 6.9306e⫹3 9.5070e⫹3
i
x max
0 共m兲 max兩x0共t兲兩 0.14862 4.8302e⫺2 0.13117
t
ẋ max
0 共m/s兲 max兩ẋ0共t兲兩 1.1795 0.32172e 0.61848
t
GUI Tool acteristics. Each earthquake is at or below the design peak ground
acceleration level for the bridge of 0.36 g’s.
A MATLAB -based graphical user interface 共GUI兲 tool has been
®
developed to aid the researcher/designer in generating the input/ The first two evaluation criteria are nondimensionalized mea-
output information for the evaluation model. The graphical user sures of the shear force at key locations in the towers. The eleva-
interface allows the user to select the node numbers defining the tion of these key locations correspond to the tower base and the
evaluation outputs ye , the connection outputs yc , and the mea- deck level 共see Fig. 3兲. The latter criterion was selected because
sured outputs ym for use in each control strategy. The location of this elevation corresponds to a drastic reduction in the cross-
the control devices may also be specified within the GUI. Once sectional area of the towers. Evaluation criteria one and two are
the control system setup is specified, the user may choose to given by
再 冎
generate the evaluation model from within the GUI or from the
max兩 F bi 共 t 兲 兩
MATLAB® command window. i,t
J 1⫽ max (20)
El Centro F max
0b
Evaluation Criteria Mexico City
Gebze
再 冎
For cable-stayed bridges subjected to earthquake loading, critical
responses are related to the structural integrity of the bridge rather max兩 F di 共 t 兲 兩
i,t
than to serviceability issues. Thus, in evaluating the performance J 2⫽ max (21)
of each control algorithm, the shear forces and moments in the El Centro F max
0d
towers at key locations 共see Fig. 3兲 must be considered. Addition- Mexico City
Gebze
ally, the tension in the cables should never approach zero, and
should remain close to the nominal pretension. 0b ⫽max兩F0bi(t)兩
where F bi (t)⫽base shear at the ith tower; F max
A set of 18 criteria have been developed to evaluate the capa- i,t
bilities of each control strategy. For each control design, the ⫽maximum uncontrolled base shear 共of the values at the two
evaluation criteria should be evaluated for each of three earth- towers兲; F di (t)⫽shear at the deck level in the ith tower 共see Fig.
quake records provided in the benchmark problem: 共1兲 El 0d ⫽max兩F0di(t)兩⫽maximum uncontrolled shear at the deck
3兲; F max
i,t
Centro—The North-South component recorded at the Imperial
level, and 兩•兩 indicates absolute value. The values of F max max
0b , F 0d ,
Valley Irrigation District substation in El Centro, California, dur-
ing the Imperial Valley, California earthquake of May, 18, 1940; and all other values used to normalize the evaluation criteria, are
共2兲 Mexico City—Recorded at the Galeta de Campos station with provided in Table 1.
site Geology of Meta-Andesite Breccia in September 19, 1985; The second set of evaluation criterion are nondimensionalized
and 共3兲 Gebze, Turkey—The North-South component of the Ko- measures of the moments in the towers at the same key locations,
caeli earthquake recorded at the Gebze Tubitak Marmara given by
再 冎
Arastirma Merkezi on Aug. 17, 1999. The Mexico City earth-
max兩 M bi 共 t 兲 兩
quake is selected because geological studies have indicated that i,t
the Cape Girardeau region is similar to Mexico City. The El Cen- J 3⫽ max (22)
El Centro M max
0b
tro and Gebze earthquakes allow for the researcher/designer to Mexico City
test his/her control strategies on earthquakes with different char- Gebze
864 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng., 2003, 129(7): 857-872
J 4⫽ max
El Centro
Mexico City
再 max兩 M di 共 t 兲 兩
i,t
M max
0d
冎 (23) J 9⫽ max
El Centro
Mexico City
再 max储 M bi 共 t 兲储
i
储 M 0b 共 t 兲储
冎 (29)
Gebze Gebze
where M bi (t)⫽moment at the base of the ith tower; M max
i,t
0b
⫽max兩M 0bi(t)兩⫽maximum uncontrolled moment at the base of the
two towers; M di (t)⫽moment at the deck level in the ith tower;
J 10⫽ max
El Centro
Mexico City
再 max储 M di 共 t 兲储
i
储 M 0d 共 t 兲储
冎 (30)
0d ⫽max兩M 0di(t)兩⫽maximum uncontrolled moment at the
and M max Gebze
i,t where 储 M 0b (t) 储 ⫽maximum of the normed value of the uncon-
deck level in the two towers. trolled moment at the base of the two towers and 储 M 0d (t) 储
The fifth evaluation criterion is a nondimensionalized measure ⫽maximum of the normed value of the uncontrolled moment at
of the deviation of the tension in the stay cables from the nominal the deck level of the two towers.
pretension, given by The 11th evaluation criterion is a nondimensionalized measure
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
再 冏 冏冎
T ai 共 t 兲 ⫺T 0i of the normed value of the deviation of the tension in the stay
J 5⫽ max max (24) cables from the nominal pretension, given by
再 冎
El Centro i,t
T 0i
Mexico City 储 T ai 共 t 兲 ⫺T 0i 储
Gebze J 11⫽ max max (31)
El Centro i,t
T 0i
where T 0i ⫽nominal pretension in the ith cable and T ai (t) Mexico City
⫽actual tension in the cable as a function of time. This criterion Gebze
is selected to reduce the likelihood of failure or unseating of the where T 0i ⫽existing pretension in the ith cable and T ai (t)
cables. ⫽actual tension in the ith cable as a function of time.
The Sixth evaluation criterion is a measure of the peak deck The 12th evaluation criterion deals with the maximum force
displacement at Bent 1 and Pier 4. generated by the control device共s兲 and is described as
J 6⫽ max
El Centro
Mexico City
再 冏 冏冎
max
i,t
x bi 共 t 兲
x 0b
(25) J 12⫽ max
El Centro
Mexico City
再 冉 冊冎
max
i,t
f i共 t 兲
W
(32)
Gebze Gebze
where x bi (t)⫽displacement of the deck at these locations and where f i (t)⫽force generated by the ith control device over the
x 0b ⫽maximum of the uncontrolled deck response. This criterion time history of each earthquake and W⫽510,000 kN
is included to consider the likelihood of impact of the deck at (114,640 kips)⫽seismic weight of bridge based on the mass of
these locations. the superstructure 共not including the foundation兲.
The seventh and eighth evaluation criteria are nondimension- The 13th criterion is based on the maximum stroke of the
alized measures of the normed values of the base shear and shear control device共s兲. This performance measure is given as
at the deck level in each of the towers, respectively, given by
再 冉 冊冎 兩 y id 共 t 兲 兩
再 冎
J 13⫽ max max (33)
max储 F bi 共 t 兲储 El Centro i,t x max
0
i Mexico City
J 7⫽ max (26) Gebze
储 F 0b 共 t 兲储
El Centro
Mexico City
where y di (t)⫽stroke of the ith control device over the time his-
0 ⫽maximum uncontrolled dis-
tories of each earthquake, and x max
Gebze
再 冎
placement at the top of the towers relative to the ground. When
max储 F di 共 t 兲储
i
devices are used that do not have an associated stroke 共e.g., tuned
J 8⫽ max (27) liquid dampers兲, the researcher/designer should assume this
储 F 0d 共 t 兲储
El Centro evaluation constraint is zero.
Mexico City
Gebze The 14th evaluation criterion is a nondimensionalized measure
of the maximum instantaneous power required to control the
where 储 F 0b (t) 储 ⫽maximum of the normed value of the uncon- bridge, and is defined as
再 冎
trolled base shear of the two towers and 储 F 0d (t) 储 ⫽maximum of
the normed value of the uncontrolled shear at the deck level of the max关 兺 i P i 共 t 兲兴
tower. The normed value of the response, denoted 储•储, is defined t
J 14⫽ max (34)
as El Centro ẋ max
0 W
冑冕
Mexico City
tf Gebze
1
储•储⬅ 共 • 兲 2 dt (28) where P i (t)⫽measure of the instantaneous power required by the
tf 0
ith control device; and ẋ max 0 ⫽peak uncontrolled velocity at the top
where t f is defined as the time required for the response to attenu- of the towers relative to the ground. Values for ẋ max 0 are provided
ate. in Table 1 for each of the earthquakes specified. For active control
The ninth and tenth evaluation criteria are nondimensionalized devices, P i (t)⬅ 兩 ẏ di (t) f i (t) 兩 , where ẏ di (t)⫽velocity of the ith
measures of the normed values of the overturning moment and control device. When semiactive devices are employed, P i (t) is
moment at the deck level in each of the towers, respectively, the actual power required to operate the device. For passive con-
given by trol devices, this criterion is zero.
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 865
J. Struct. Eng., 2003, 129(7): 857-872
Table 2. Summary of Evaluation Criteria
Peak responses Normed responses Control strategy
再 冎
Base shear Base shear Peak force
J 1⫽ max
El Centro
Mexico City
max兩Fbi共t兲兩
i,t
Fmax
0b
J 7⫽ max
El Centro
Mexico City
再 max储Fbi共t兲储
i
储F0b共t兲储
冎 J 12⫽ max
El Centro
Mexico City
Gebze
再 冉 冊冎
max
i,t
f i共t兲
W
Gebze Gebze
再 冎
Shear at deck level Shear at deck level Device stroke
J 2⫽ max
El Centro
Mexico City
max兩Fdi共t兲兩
i,t
Fmax
0d
J 8⫽ max
El Centro
Mexico City
再 max储Fdi共t兲储
i
储F0d共t兲储
冎 J 13⫽ max
El Centro
Mexico City
Gebze
再 冉 冊冎
max
i,t
兩ydi 共t兲兩
xmax
0
Gebze Gebze
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
再 冎 再 冎
Overturning moment Overturning moment Peak power
J 3⫽ max
El Centro
Mexico City
max兩M bi共t兲兩
i,t
M max
0b
J 9⫽ max
El Centro
Mexico City
再 max储M bi共t兲储
i
储M 0b共t兲储
冎 J 14⫽ max
El Centro
Mexico City
max关 兺iPi共t兲兴
t
ẋmax
0 W
Gebze Gebze Gebze
再 冎
Moment at deck level Moment at deck level Total power
max兩M di共t兲兩
再 max储M di共t兲储
冎 再 冎
t
兺 i 共 兰 0f P i 共 t 兲 dt 兲
i,t i J 15⫽ max
J 4⫽ max J 10⫽ max x max
0 W
El Centro M max
0d El Centro
储M 0d共t兲储 El Centro
Mexico City
Mexico City Mexico City Gebze
Gebze Gebze
Cable tension Cable tension J 16⫽number of control devices
J 5⫽ max
El Centro
Mexico City
再 冏 max
i,t
Tai共t兲⫺T0i
T0i
冏冎 J 11⫽ max
El Centro
Mexico City
再 max
i,t
储Tai共t兲⫺T0i储
T0i 冎 J 17⫽number of sensors
J 18⫽dim(x ck )
Gebze Gebze
Deck displacement at abutment
J 6⫽ max
El Centro
Mexico City
再 冏 冏冎
max
i,t
xbi共t兲
x0b
Gebze
The 15th evaluation criterion is a nondimensionalized measure control system that performs well for one type of earthquake but
of the total power required to control the bridge, and is defined as marginally for other earthquakes used to evaluate the control
再 冎
t strategy.
兺 i 共 兰 0f P i 共 t 兲 dt 兲
J 15⫽ max (35)
x max
0 W
El Centro
Mexico City
Control Strategy Implementation Constraints
Gebze and Procedures
This criterion is zero when passive device共s兲 are used. To allow researchers/designers to compare and contrast various
The 16th evaluation criterion J 16 is a measure of the total control strategies, each of the controllers must be subjected to a
number of control devices required in the control system to con- uniform set of constraints and procedures, specified below:
trol the bridge. The 17th evaluation criterion J 17 is a measure of 1. The measured outputs directly available for use in determin-
the total number of sensors required for the proposed control ing the control action are the absolute accelerations of the
strategy. The final evaluation criterion provides a measure of the bridge at the nodes of the finite-element model, and control
resources required to implement the control algorithm and is device outputs which are readily available 共e.g., device
given by stroke, force, or absolute acceleration兲. Although absolute
J 18⫽dim共 xck 兲 (36) velocity measurements are not available, appropriate filtering
of the absolute accelerations may be performed to approxi-
where xck ⫽discrete-time state vector of the control algorithm mate the velocity responses as described in Spencer et al.
given in Eq. 共13兲. 共1998a,b兲. If pseudo-velocity measurements are used, the
A summary of the evaluation criteria is provided in Table 2. designer/researcher should specify the filter used in the sen-
The values of the uncontrolled responses for the three earthquakes sor model 关see Eqs. 共11兲 and 共12兲兴;
are provided in Table 1. All 18 criteria and all three earthquakes 2. The digitally implemented controller has a sampling time of
should be reported for each proposed design. However, designers/ T⫽0.02 s. This sampling time should be set equal to the
researchers are encouraged to include additional criteria in their integration step of the simulation;
results if, through these criteria, their results demonstrate an over- 3. The A/D and digital-to-analog 共D/A兲 converters on the digi-
all desirable quality. An example of such a situation might be a tal controller have 16-bit precision and a span of ⫾10 V;
866 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng., 2003, 129(7): 857-872
4. Each of the measured responses contains an 共RMS兲 noise of
0.03 V, which is approximately 0.3% of the full span of the
A/D converters. The measurement noises are modeled as
Gaussian rectangular pulse processes with a pulse width
equal to the integration step;
5. Currently, available real-time control implementation hard-
ware is impressive. However, such hardware has limitations
and the number of calculations in the control scheme should
be kept to a reasonable number. The designer/researcher
should justify that the proposed algorithm共s兲 can be imple- Fig. 10. SIMULINK® block: Sensors
mented with currently available computing hardware;
6. The control algorithm is required to be stable. The stability in the bridge with hydraulic actuators. Thus, the modified model is
robustness for each proposed active control design should be used for the control design. For simplicity, the control devices act
discussed by each researcher/designer; as ideal force actuators, and actuator dynamics and control-
7. The performance criteria of each researcher/designer’s con- structure interaction is neglected. This sample has been prepared
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
troller should be evaluated using the evaluation model, the to serve as a guide to designers/researchers and is not intended to
provided SIMULINK® diagram, and each of the earthquake be competitive.
records provided in the benchmark problem;
8. Designers/researchers are requested to submit a program that Sensors
will produce each of the evaluation criterion specified in this
Five accelerometers and four displacement sensors are employed
problem statement. The resulting controllers will be included
in the sample control system. Four accelerometers are located on
on the web page for the first generation benchmark bridge
top of the tower legs 共Nodes 240, 248, 353, 361兲, and one is
control problem. Instructions on the formatting of these files
located on the deck at midspan 共Node 34兲. All accelerometers are
are included in the information provided with the benchmark
positioned to measure the absolute acceleration in the global X
files;
direction, which is longitudinal to the bridge. The natural fre-
9. Designers/researchers are required to submit the
quency of the selected accelerometers are assumed to have a
SIMULINK® blocks used for controller performance evalua-
value that is at least an order of magnitude higher than the highest
tions. For each controller, one sensor block, one control al-
gorithm block, and one control device block should be sub- natural frequency we are interested in controlling. Thus the se-
mitted; lected accelerometers have a flat frequency response to approxi-
10. Tension in the stay cables should remain within a recom- mately 3,000 rad/s 共i.e., a constant magnitude and phase兲, and
mended range of allowable values. A lower bound is nec- sensor dynamics can be neglected. Two displacement sensors are
essary to ensure that unseating of a cable does not occur, positioned between the deck and Pier 2 关node pairs 共84, 313兲,
and an upper bound provides a factor of safety to prevent 共151, 314兲兴 and two displacement sensors are located between the
failure of the cable. The tension in the ith cable may not deck and Pier 3 关node pairs 共118, 428兲, 共185, 429兲兴. All displace-
exceed 0.7T f i or fall below 0.2T f i , where T f i is the tension ment measurements are obtained in the longitudinal direction to
that would cause failure of the ith cable. Values for T f i are the bridge 共global X direction兲.
provided in the MATLAB® codes; To ensure that the accelerations and displacement measured on
11. Because the D/A converters have a range of ⫾10 V, the the bridge are within the range of the A/D converters, accelerom-
command signal to each control device has a constraint of eters are selected with a sensitivity of 7 V/g 共i.e., 7 V
maxt兩uki (t)兩⭐10 V, where u ki (t) is the ith component of the ⫽9.81 m/s2 ) and a displacement sensors have a sensitivity of 30
V/m 共i.e., 10 V⫽0.33 m). Thus the sensor system is defined in
control signal;
the form of Eqs. 共11兲 and 共12兲 as
12. Each control device employed should be described in terms
of the maximum force that can be generated. Researchers/ ys ⫽Ds ym ⫹v (37)
designers must demonstrate that this force constraint is met
where y ⫽vector of the measured responses in volts; ym
s
during each of the earthquakes;
⫽vector of measured continuous-time responses in physical units
13. Any additional constraints that are unique to each control
共i.e., 关m/sec2兴 for accelerations and 关m兴 for displacements兲; and v
scheme should also be reported 共i.e., maximum stroke of
is the measurement noise, and
control device, maximum velocity of control device, etc.兲.
Control devices should be selected to allow for expansion
of the briege due to temperature effects. Ds ⫽ 冋 I5⫻5 G a
0
0
I4⫻4 G d
册 (38)
where G a ⫽0.714 V/(m/ sec2 )⫽sensor gain for acceleration and
Sample Control System Design G d ⫽30 V/m. The sensor block is represented in the SIMULINK®
block shown in Fig. 10. Note that in the sample controller the
The following sample control design serves as a guide to the device outputs are not measured, and therefore the corresponding
participants in this study and will lead them through the con- signal y f is not connected to the system, although it is available
straints and design criteria that are set forth in the previous sec- for participants. Finally, noise with an RMS value of 0.03 V is
tions. Accelerometers and displacement transducers are used for added to the acceleration signal.
feedback to the control algorithm. The sample control system
employs a total of 24 hydraulic actuators located between the
Control Devices
deck and abutment and the deck and the towers and oriented to
apply forces longitudinally 共X direction兲. Therefore, to implement A total of 24 hydraulic actuators are placed, eight between the
this controller one would replace the shock transmission devices deck and Pier 2, eight between the deck and Pier 3, four between
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 867
J. Struct. Eng., 2003, 129(7): 857-872
relatively small controllability and observability grammians. The
resulting state space system is represented as follows
ẋr ⫽Ar xr ⫹Br ẍ g ⫹Er u (41)
z⫽Czr xd ⫹Dzr ẍ g ⫹Fzr u (42)
ym ⫽Cry xd ⫹Dry ẍ g ⫹Fry u (43)
where x ⫽design state vector; Ar and Br ⫽system matrices; and
d
z⫽regulated output vector, which is obtained from the mapping
matrices Crz , Drz , and Frz . Similarly, ym is the measurement vec-
Fig. 11. Typical tower actuator implementation tor, which is obtained from the mapping matrices Cry , Dry , and
Fry . The gains of the sensors and control devices 关i.e., Ds in Eq.
共38兲 and Dd in Eq. 共40兲, respectively兴, as well as the matrix de-
fining the number of control devices 关 Gdev in Eq. 共40兲兴, are incor-
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
the deck and Bent 1, and four between the deck and Pier 4. The
porated into this model for control design.
control devices are oriented to apply forces longitudinally. Four
actuators are located between each of the following pairs of nodes
on Piers 2 and 3: 共84, 313兲, 共151, 314兲, 共118, 428兲, 共185, 429兲; Control Algorithm
two actuators are located between each of the following pairs of
nodes on Bent 1 and Pier 4: 共68, ground兲, 共135, ground兲, 共134, The sample controller employs a linear quadratic Gaussian 共LQG兲
444兲, 共201, 440兲. The actuators have a capacity of 1,000 kN. For control design. For this design, ẍ g is taken to be a stationary white
this sample control design actuator dynamics are neglected and noise, and an infinite horizon performance index is chosen that
the actuator is considered to be ideal. weights the displacements of the deck at Bent 1 and Pier 4, i.e.,
Fig. 11 shows the typical device layout. The equations describ-
ing the forces produced by the actuators in the form of Eqs. 共15兲
and 共16兲 are
J⫽ lim
→⬁
1
E 冋冕 0
兵 共 Czr xr ⫹Dzr u兲 T Q共 Czr xr ⫹Dzr u兲 ⫹uT Ru其 共 dt 兲 册
(44)
f⫽K f u and y f ⫽Dd u (39)
where R⫽ 关 8⫻8 兴 identity matrix and the weighting on the regu-
where Dd ⫽100 kN/V (10 V⫽1,000 kN)⫽gain of the actuator lated outputs was chosen to be Q⫽103 I4⫻4 . Further, the mea-
and K f ⫽matrix that accounts for the gain of the actuator 共i.e., the surement noise is assumed to be identically distributed, statisti-
relationship between the input voltage and the desired control cally independent Gaussian white noise processes, and
force兲 as well as the fact that multiple actuators are used at each S ẍ g ẍ g /S v i v i ⫽␥⫽25.
actuator location. For the sample control design K f takes the form
冋 册
The control and estimation problems are considered separately
2I1⫻1 0 according to the separation principle 共Stengel 1986; Skelton
1988兲, yielding a controller of the form
Kf ⫽ 4I2⫻2 Dd ⫽GdevDd (40)
u⫽⫺Kux̂r (45)
0 2I1⫻1
where x̂ ⫽Kalman filter estimate of the state vector based on the
r
Fig. 12 shows the SIMULINK® control device block. For the
reduced order model. By the certainty equivalence principle
sample control design there are no connection inputs to the con-
共Stengel 1986; Skelton 1988兲, Ku is the full state feedback gain
trol devices because the actuator dynamics are neglected and the
matrix for the deterministic regulator problem given by
control device model does not require any inputs from the struc-
ture. Ku⫽R̃⫺1 共 Ñ⫹BTd P> 兲 (46)
where P> ⫽solution of the algebraic Riccati equation given by
Control Design Model
0⫽P> Ã⫹ÃT P> ⫺P> Bd R̃⫺1 BTd P> ⫹Q̃ (47)
A reduced order model of the system is developed for control
design. This model, designated the design model, is formed from and
the evaluation model and has 30 states. The resulting model has T
the same outputs as the evaluation model 关see Eq. 共10兲兴. The Q̃⫽Czd QCzd ⫺ÑR̃⫺1 ÑT (48)
reduced order model is formed in MATLAB® by forming a bal- T
anced realization of the system and condensing out the states with Ñ⫽Czd QDzd (49)
T
R̃⫽R⫹Dzd QDzd (50)
Ã⫽Ad ⫺Bd R̃⫺1 ÑT (51)
Calculations to determine Ku were done using the MATLAB®
共1997兲 routine lqry.m within the control toolbox.
The Kalman filter optimal estimator is given by
x̂r ⫽Ar x̂r ⫹Br u⫹L共 ym ⫺Cry x̂r ⫺Dry u兲 (52)
> ⫺1 共 ␥Fry ETr ⫹Cry S兲兴 T
L⫽ 关 R (53)
®
Fig. 12. SIMULINK block: Control devices
where S⫽solution of the algebraic Riccati equation given by
868 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng., 2003, 129(7): 857-872
Fig. 13. SIMULINK® block: Control algorithm
Table 3. Evaluation Criteria for Sample Controller
Value El Centro Mexico Gebze Max Value El Centro Mexico Gebze Max
J1 0.38706 0.46110 0.45488 0.46110 J 10 0.882351 1.1036 1.4573 1.4573
J2 1.0665 1.3645 1.3828 1.3828 J 11 2.8015e⫺2 1.0252e⫺2 1.7065e⫺2 2.8015e⫺2
J3 0.29392 0.58477 0.44515 0.58477 J 12 1.5828e⫺3 5.9575e⫺4 1.7264e⫺3 1.7264e⫺3
J4 0.62525 0.61401 1.2246 1.2246 J 13 0.78713 1.1723 1.9566 1.9566
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
J5 0.18580 7.697e⫺2 0.14832 0.18580 J 14 2.6938e⫺3 1.8124e⫺3 7.3198e⫺3 7.3198e⫺3
J6 1.1988 2.3278 3.5686 3.5686 J 15 4.2756e⫺4 2.4143e⫺4 6.9029e⫺4 6.9029e⫺4
J7 0.22603 0.39931 0.32365 0.39931 J 16 24 24 24 24
J8 1.1805 1.2109 1.4403 1.4403 J 17 9 9 9 9
J9 0.26697 0.41903 0.45564 0.45564 J 18 30 30 30 30
Fig. 14. Simulated responses to El Centro earthquake: 共a兲 uncontrolled cable tensions; 共b兲 controlled cable tensions; and 共c兲 uncontrolled and
controlled base shear force record 共Pier 2兲.
> ⫹A
0⫽SA > T S⫺SG
> S⫹H
> (54) For implementation on a digital computer, the controller is put
in the form of Eqs. 共13兲–共14兲 using the bilinear transformation
and
共Antoniou 1993; Quast et al. 1995兲 yielding the following com-
T T
> ⫺1 共 ␥Fry Ery 兲
> ⫽ATr ⫺Cry R
A (55) pensator:
G
T
> ⫺1 Cry
> ⫽Cry R (56) xck⫹1 ⫽Ac xck ⫹Bc ysk (59)
H
T
> ⫺1 Fry ETr
> ⫽␥Er ETr ⫺␥ 2 Er Fry R (57) uk ⫽Cc xck ⫹Dc ysk (60)
T Calculations to determine the discrete-time compensator were
> ⫽I⫹␥Fry Fry
R (58)
performed in MATLAB® using the c2dm.m routine within the
Calculations to determine L were done using the MATLAB® rou- control toolbox.
tine lqew.m within the control toolbox. The SIMULINK® block shown in Fig. 13 is used to represent
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 869
J. Struct. Eng., 2003, 129(7): 857-872
Table 4. Actuator Requirements for Sample Control Strategy helpful advice of Professor Yozo Fujino 共University of Tokyo兲,
Response El Centro Mexico Gebze Max Professor Masato Abe 共University of Tokyo兲, Professor Hirokazu
Iemura 共Kyoto University兲, Professor Joel Conte 共University of
Force 共kN兲 807.22 303.83 880.45 880.45 California, Los Angeles兲, Professor Petros Voulgaris 共University
Stroke 共m兲 0.1170 0.0566 0.2566 0.2566 of Illinois兲, Professor Fabio Biondini 共Politecnico di Milano兲, and
Vel 共m/s兲 0.6850 0.3245 0.5644 0.6850 Gerry Pollok 共ABAQUS®兲, as well as additional comments pro-
vided by members of the ASCE/IASC Task Group on Benchmark
Structural Control Problems and other members of the structural
the sample control algorithm in the simulation. To represent the
control community, are gratefully acknowledged.
hardware used to implement this algorithm on a digital computer,
an analog-to-digital converter 共A/D兲 and a digital-to-analog con-
verter 共D/A兲 are modeled. The models consist of a quantizer and
a saturator as described in the Control Strategy Implementation Notation
Constraints and Procedures.
The following symbols are used in this paper:
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
Ac ,Bc ,Cc ,Dc
Evaluation of Sample Control Design ⫽ discrete controller system matrices;
Ae ,Be ,Ce ,De
The closed-loop response is evaluated for the three earthquakes
⫽ state space matrices of evaluation model;
specified. Table 3 shows the values of the evaluation criteria in
Eqs. 共20兲–共36兲. The responses of the controlled bridge are com- Ar ,Br ,Crz ,Drz ,Cry ,Dry ,Er ,Frz ,Fry
pared to those of the uncontrolled bridge for the El Centro earth- ⫽ reduced model system matrices in which
quake in Fig. 14. The left plot shows the maximum and minimum superscript z denotes regulated outputs, and y
cable tension as a function of cable number. The dark region denotes measured outputs;
provides the acceptable range of cable tensions as specified in the A> ⫽ matrix used in solution of algebraic Riccati
control constraints 共between the 0.2T f i and 0.7T f i ), and the equation for Kalman estimator;
lighter region provides a graphical description of the actual mini- A ⫽ equivalent area of cross section of deck;
mum and maximum cable tension. Note that the uncontrolled A c ⫽ cable cross-sectional area;
cable tension falls below the lower bound in cables near the tower b i ⫽ long dimension of each element of deck
for this earthquake. However, the controlled cable tension is well cross section used to obtain pure torsional
within the bounds. Additionally a graph of the base shear at Pier constant of deck, J t ;
2 is provided to demonstrate the reduction that the controller can Ĉ ⫽ damping matrix of evaluation model;
achieve. To demonstrate the feasibility of this controller, peak Ds ⫽ matrix describing model of sensors in
values of the force, stroke, and velocity are provided for each sample controller;
earthquake in Table 4. Note that the force, velocity, and displace- Dd ⫽ matrix gain of control devices;
ment requirements are feasible for a device of this size. d ⫽ distance between web of two edge girders;
E c ⫽ modulus of elasticity of cables;
E eq ⫽ equivalent modulus of elasticity of cables
Closure including catenary effects;
E s ⫽ modulus of elasticity of steel;
A benchmark problem on the seismic control of cable-stayed e ⫽ distance between neutral axis of deck and
bridges has been developed based on the Bill Emerson Memorial center of concrete slab;
Bridge in Cape Girardeau, Missouri spanning the Mississippi 0b ⫽ maximum uncontrolled base shear at towers;
F max
River. For Phase I of the benchmark problem, a finite-element F bi (t) ⫽ base shear at ith tower;
model has been developed, and evaluation criteria are provided 储 F 0b (t) 储 ⫽ maximum of normed value of uncontrolled
that are consistent with the goals of controlling cable-stayed base shear at two towers;
bridges subjected to earthquake loading. The evaluation model of F di (t) ⫽ shear force at deck level in ith tower;
the Emerson cable-stayed bridge, the MATLAB® 共1997兲 files used 储 F 0d (t) 储 ⫽ maximum of normed value of uncontrolled
for the sample control design, and the simulation model, are shear at deck level for towers;
available at 具http://wusceel.cive.wustl.edu/quake/典. If you cannot F max
0d ⫽ maximum uncontrolled shear force at deck
access the World Wide Web or have questions regarding the level of two towers;
benchmark problem please contact Dr. Shirley Dyke via e-mail at f ⫽ continuous-time force output of control
sdyke@seas.wustl.edu. devices;
Phase II of this study will focus on more complex issues re- f i (t) ⫽ force generated by ith control device;
garding the control of cable-stayed bridges such as transverse and f ⬘c ⫽ 28 day compressive strength of concrete;
multi-support excitations. G> ⫽ matrix used in solution of algebraic Riccati
equation for Kalman estimator;
G s ⫽ shear modulus of steel;
Acknowledgments G a ,G d ⫽ sensitivity of acceleration and displacement
sensors in sample controller;
This research is supported in part by the National Science Foun- G dev ⫽ gain factor to account for number of control
dation Grant No. CMS 97-33272 共Dr. S.C. Liu, Program Direc- devices in control device model;
tor兲. The writers would like to thank Mr. Shyam Gupta of the g1 ,g2 ⫽ models for interfacing with sensors;
Missouri Department of Transportation and Mr. Bill Strossener of g3 ,g4 ⫽ models for interfacing with active/
the FHWA for pertinent information on the Emerson Bridge. The semiactive control algorithm;
870 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng., 2003, 129(7): 857-872
g5 ,g6 ⫽ models for interfacing with control device perpendicular to axis under consideration in
model 共without device model兲; correction of mass moment of inertia of
g7 ,g8 ,g9 ⫽ models for interfacing with control device deck;
model 共including device models兲; S ⫽ solution of algebraic Riccati equation for
> ⫽ matrix used in solution of algebraic Riccati
H Kalman estimator;
equation for Kalman estimator; S v i v i ,S ẍ g x̄ g ⫽ autospectral density function of
I i ⫽ mass moment of inertia of ith lumped mass measurement noise and of ground
in calculation of correction of rotational acceleration;
mass inertia of deck; TR ⫽ transformation matrix for condensation;
I j ⫽ mass moment of inertia of lumped masses T ⫽ discrete-time step;
in deck with respect to jth axis 共X, Y, or Z兲; T 0i (t) ⫽ nominal pretension in ith cable;
I mi ⫽ mass moment of inertia of each of ith T ai (t) ⫽ actual tension in cable;
component of deck with respect to its cent- Tfi ⫽ ultimate load of ith stay cable;
roidal axis; Tc ⫽ cable tension;
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
I m j ⫽ mass moment of inertia of section with t ⫽ time variable;
respect to jth axis; ti ⫽ thickness of each element of deck cross
I zz ,I y y ⫽ moments of inertia of bridge sections about section used to obtain pure torsion constant
Z and Y axes, respectively; of deck J t ;
J ⫽ performance index; tf ⫽ final time of simulation;
J t ⫽ pure torsion constant of deck; U ⫽ displacement vector of bridge model;
J eq ⫽ equivalent torsion constant of deck taking Û ⫽ displacement vector of active DOF;
into consideration pure torsion and warping Ū ⫽ displacement vector of dependent DOF;
torsion; uk ⫽ discrete-time control command signal
J 1 ,J 2 ,...,J 18 ⫽ evaluation criteria; vector;
K,M ⫽ global stiffness and mass matrices;
u ki (t) ⫽ time response of ith component of control
Ku ⫽ full state feedback gain matrix for
signal;
deterministic regulator problem;
v ⫽ sensor noise;
Kel,Mel ⫽ element stiffness and mass matrices;
w ⫽ weight per unit length of cables;
K̂,M̂ ⫽ stiffness and mass matrices for evaluation W ⫽ seismic weight of bridge 共not including
model; foundation兲;
k ⫽ discrete-time index; x ⫽ general state vector to describe analysis
L ⫽ observer measurement gain matrix; tool;
L ⫽ length of main span of bridge; xck ⫽ discrete-time state vector of control
L x ⫽ projected length of cables in X-Z plane; algorithm at time t⫽kT;
0b ,M 0d ⫽ maximum uncontrolled moment at base 共and
M max max
xd ⫽ continuous-time state vector of control
deck level兲 of two towers; devices model;
M bi(t),M di(t) xr ⫽ continuous-time state vector of reduced
⫽ moment at base 共and deck level兲 of ith tower; order 共design兲 model;
储 M 0b (t) 储 , 储 M 0d (t) 储 x̂r ⫽ Kalman filter estimate for state vector of
⫽ maximum of normed value of uncontrolled reduced order 共design兲 model;
moment at base 共and deck level兲 of towers; xr ⫽ continuous-time state vector of reduced
M l ⫽ mass of lumped masses used in deck model; order 共design兲 model;
m i ⫽ mass of the ith element of deck in model; xs ⫽ continuous-time state vector of sensor
Ñ ⫽ matrix used in solution of algebraic Riccati model;
equation for LQR controller; x max
0 ⫽ maximum uncontrolled displacement at top
Pa ⫽ load vector; of tower relative to ground;
P> ⫽ solution of algebraic Riccati equation for ẋ max
0 ⫽ maximum uncontrolled velocity at top of
LQR controller; tower relative to ground;
P i (t) ⫽ instantaneous power required by ith control ẍ g ⫽ ground acceleration;
device; yc ⫽ continuous-time connection output from
Q ⫽ regulated output weighting matrix for LQR evaluation model to devices model;
controller design; ye ⫽ continuous-time evaluation outputs from
R ⫽ control effort weighting matrix used in LQR evaluation model;
controller design; yf ⫽ continuous-time force output vector from
R̃ ⫽ matrix used in solution of algebraic Riccati control devices model;
equation for LQR controller; ysk ⫽ discrete-time output vector from sensor
R> ⫽ matrix used in solution of algebraic Riccati model;
equation for Kalman estimator; ym ⫽ continuous-time measured output vector
r ⫽ distance from lumped masses, perpendicular used for feedback;
to axis under consideration in correction of ys ⫽ continuous-time output from sensor model;
mass moment of inertia of deck; y di (t) ⫽ time response of stroke of ith control
r i ⫽ distance from ith element of deck, device;
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 871
J. Struct. Eng., 2003, 129(7): 857-872
z ⫽ vector of regulated outputs for reduced Craig, Jr., R. R. 共1981兲. Structural dynamics, an introduction to computer
order 共design兲 model; methods, Wiley, New York.
⌫ ⫽ coefficient vector relating ground Ernst, H. J. 共1965兲. ‘‘Der E-Modul von Seilen unter Berucksichtigung des
acceleration input to longitudinal bridge Durchhanges.’’ Der Bauingenieur, 40共2兲, 311–323 共in German兲.
DOFs; Hague, S. 共1997兲. ‘‘Composite design for long span bridges.’’ Proc. of the
ˆ⌫ ⫽ ground acceleration coefficient vector in XV ASCE Structures Congress, Portland, Ore.
MATLAB 共1997兲. The Math Works, Inc., Natick, Mass.
evaluation model; Ohtori, Y., Christenson, R., Spencer, Jr., B. F., and Dyke, S. J. 共2003兲.
⌫ w ⫽ warping constant of deck; ‘‘Benchmark control problems for seismically-excited nonlinear
␥ ⫽ ratio of autospectral density of ẍ g to buildings.’’ J. Eng. Mech., in press.
autospectral density of sensor noise; Ohtori, Y., and Spencer, B. F., Jr. 共1999兲. ‘‘A MATLAB-based tool for
⌬ j ⫽ correction values of mass moment of inertia nonlinear structural analysis.’’ Proc., 13th Engineering Mechanics
of deck with j⫽X,Y ,Z; Conf., Baltimore, June 13–16.
⌬ X ,⌬ Y ,⌬ Z ⫽ correction values of mass moment of inertia Quast, P., Spencer, Jr., B. F., Sain, M. K., and Dyke, S. J. 共1995兲. ‘‘Mi-
of deck; crocomputer implementation of digital control strategies for structural
⌳ ⫽ vectors of ones and zeros defining how
Downloaded from ascelibrary.org by KIIT University on 02/11/19. Copyright ASCE. For personal use only; all rights reserved.
response reduction.’’ Microcomput. Civ. Eng., 10, 13–25.
forces of control devices are input to bridge; Schemmann, A. G., Smith, H. A., Bergman, L. A., and Dyke, S. J. 共1998兲.
and ‘‘Feasibility study: Control of a cable-stayed bridge model. I: Problem
⌳ ⫽ control force coefficient matrix in evaluation
ˆ definition.’’ Proc., 2nd Int. Conf. on Structural Control, Vol. 2, Wiley,
England, 975–979, Kyoto, Japan, June 30–July 2.
model.
SIMULINK 共1997兲. The Math Works, Inc., Natick, Mass.
Skelton, R. E. 共1988兲. Dynamic systems control: Linear systems analysis
and synthesis, Wiley, New York.
References Spencer Jr., B. F., Christenson, R. E., and Dyke, S. J. 共1998b兲. ‘‘Next
generation benchmark control problem for seismically excited build-
ABAQUS 共1998兲. Hibbitt, Karlsson and Sorensen Inc., Pawtucket, R.I. ings.’’ Proc., Second World Conf. on Structural Control, Kyoto, Japan,
Antoniou, A. 共1993兲. Digital filters: Analysis, design, and applications, June 29–July 2, 1351–1360 共also see: 具http://www.nd.edu/⬃quake/典兲.
McGraw-Hill, New York, 444 – 446.
Spencer, Jr., B. F., Dyke, S. J., and Deoskar, H. S. 共1998a兲. ‘‘Benchmark
Bleich, F. 共1952兲. Bucking strength of metal structures, McGraw-Hill,
problems in structural control. I: Active mass driver system and Part
New York.
II: Active tendon system.’’ Earthquake Eng. Struct. Dyn., 27, 1127–
Caicedo, J. M., Dyke, S. J., Turan, G., and Bergman, L. A., 共2000兲.
1147.
‘‘Comparison of modeling techniques for dynamic analysis of a cable-
stayed bridge.’’ Proc., Engineering Mechanics Conf. ASCE, Austin, Stengel, R. F. 共1986兲. Stochastic optimal control: Theory and application,
Tex. May 21–23. Wiley, New York.
Caughey, T. K. 共1998兲. ‘‘The benchmark problem.’’ Earthquake Eng. Wilson, J., and Gravelle, W. 共1991兲. ‘‘Modelling of a cable-stayed bridge
Struct. Dyn., 27, 1125. for dynamic analysis.’’ Earthquake Eng. Struct. Dyn., 20, 707–721.
Çelebi, M. 共1999兲, Seismic Instrumentation of the Girardeau (MO) Yang, J. N., Agrawal, A. K., Samali, B., and Wu, J. C. 共2003兲. ‘‘Bench-
Cable-stayed Bridge, Proc., Mid-America Seismic Highway Confer- mark problem for response control of wind-excited tall buildings.’’ J.
ence, St. Louis, Missouri, 28 February–3 March. Eng. Mech., in press.
Chen, J-C., ed. 共1996兲. Proc., 2nd Int. Workshop on Structural Control: Yang, J. N., Wu, J. C., Samali, B., and Agrawal, A. K. 共1998兲. ‘‘A bench-
Next Generation of Intelligent Structures, Research Centre, The Hong mark problem for response control of wind-excited tall buildings.’’
Kong Univ. of Science and Technology, Hong Kong, Hong Kong 共see: Proc., 2nd World Conf. on Structural Control, Kyoto, Japan 共also see
具http://cwis.usc.edu/dept/civil – eng/structural/welcome.html典兲. 具http://www.eng.uci.edu/⬃anil/benchmark.html典兲.
872 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng., 2003, 129(7): 857-872
You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Tagalog English Construction TermsDocument3 pagesTagalog English Construction TermscyrawrNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Quantity Surveying - Earthworks, Concrete Etc...Document18 pagesQuantity Surveying - Earthworks, Concrete Etc...Cole Jade DayoNo ratings yet
- Site Visit Report 2Document4 pagesSite Visit Report 21man1book100% (1)
- 0.tunnel Form Technology-Case StudyDocument93 pages0.tunnel Form Technology-Case StudyP.K.MallickNo ratings yet
- 2004 - Khundia y Gosh - Flexural Stiffness of Reinforced Concrete Columns and Beams - ExperimentalDocument11 pages2004 - Khundia y Gosh - Flexural Stiffness of Reinforced Concrete Columns and Beams - ExperimentalpaulkohanNo ratings yet
- Bolts Shear and TensionDocument4 pagesBolts Shear and Tensionpjuvvadi100% (1)
- En1992 2 ManualDocument86 pagesEn1992 2 ManualMarian Dragos100% (1)
- Method Statement For Construction of Precast Concrete Pipe CulvertDocument4 pagesMethod Statement For Construction of Precast Concrete Pipe CulvertDanny NguNo ratings yet
- CIP 01 - Dusting Concrete SurfacesDocument2 pagesCIP 01 - Dusting Concrete Surfacesedward the iiiNo ratings yet
- Computational Numerical Models For Seismic Response of Structures Isolated by Sliding SystemsDocument21 pagesComputational Numerical Models For Seismic Response of Structures Isolated by Sliding SystemsAbdul Monish SheikhNo ratings yet
- Finite Element Formulations For Friction Pendulum Seismic Isolation BearingsDocument21 pagesFinite Element Formulations For Friction Pendulum Seismic Isolation BearingsAbdul Monish SheikhNo ratings yet
- Response of Sliding Structures To Earthquake Support MotionDocument20 pagesResponse of Sliding Structures To Earthquake Support MotionAbdul Monish SheikhNo ratings yet
- Response of Sliding Structures To Harmonic Support MotionDocument12 pagesResponse of Sliding Structures To Harmonic Support MotionAbdul Monish SheikhNo ratings yet
- Dynamics of Resilient-Friction Base Isolator (R-FBI)Document12 pagesDynamics of Resilient-Friction Base Isolator (R-FBI)Abdul Monish SheikhNo ratings yet
- Study and Analysis of Cable Stayed Bridges Using Staad ProDocument7 pagesStudy and Analysis of Cable Stayed Bridges Using Staad ProAbdul Monish SheikhNo ratings yet
- Research On Dynamic Analysis of RCC Columns With Different Cross SectionsDocument2 pagesResearch On Dynamic Analysis of RCC Columns With Different Cross SectionsAbdul Monish SheikhNo ratings yet
- Analysis of RCC Framed Structure For Column With Modelling IrregularitiesDocument8 pagesAnalysis of RCC Framed Structure For Column With Modelling IrregularitiesAbdul Monish SheikhNo ratings yet
- 3A - Flexural Behaviour of BeamsDocument57 pages3A - Flexural Behaviour of BeamsNoman Tariq MalkaniNo ratings yet
- Steel Design Guide Series 1 Column Base PlatesDocument9 pagesSteel Design Guide Series 1 Column Base PlatesAPDB GALABNODNo ratings yet
- Formwork and ScaffoldingDocument57 pagesFormwork and Scaffoldingमन्दिप नेपालNo ratings yet
- Improved Canadian Seismic Provisions For Steel Braced Frames in HeavyDocument16 pagesImproved Canadian Seismic Provisions For Steel Braced Frames in Heavymd ashraful alamNo ratings yet
- Computerised Design of Box Girder Bridge Using Balanced Cantilever MethodDocument14 pagesComputerised Design of Box Girder Bridge Using Balanced Cantilever MethodTeo Peng KeatNo ratings yet
- Reinforcement Bar TabelDocument3 pagesReinforcement Bar TabelTri Angga Dio SimamoraNo ratings yet
- Concrete and Rebar CommandsDocument7 pagesConcrete and Rebar CommandsRicky GunawanNo ratings yet
- Seismic Performance of Stairs in The Existing ReinDocument9 pagesSeismic Performance of Stairs in The Existing Reinl_pintoNo ratings yet
- NBC110Document10 pagesNBC110Veronica SandersNo ratings yet
- Elevation: Saudi Arabian Oil CompanyDocument1 pageElevation: Saudi Arabian Oil CompanyDomie Neil Bucag SalasNo ratings yet
- Boq & Anlysis Raft FoundationDocument3 pagesBoq & Anlysis Raft FoundationGhiyats D. U.No ratings yet
- Correction - Assignment 1Document7 pagesCorrection - Assignment 1Sevag MakdissianNo ratings yet
- Comparative Study of Concrete Mix Design by Adding Various Types of AdmixturesDocument6 pagesComparative Study of Concrete Mix Design by Adding Various Types of AdmixturesSagarNo ratings yet
- Interpreter of MaladiesDocument50 pagesInterpreter of MaladiesmahakNo ratings yet
- RCS 5Document15 pagesRCS 5venu.y14322No ratings yet
- 07 Chapter2Document21 pages07 Chapter2salim HobeesNo ratings yet
- 2013 - G - Terrasi JMSR - 1 - 2 - 2013-20556Document14 pages2013 - G - Terrasi JMSR - 1 - 2 - 2013-20556Engr Muhammad AbidNo ratings yet
- Bhawan Yan 2055Document3 pagesBhawan Yan 2055Dhirean Kumar SunarNo ratings yet
- Wiac - Info PDF Irc 112 2020 Amendment PRDocument10 pagesWiac - Info PDF Irc 112 2020 Amendment PRBRIDGEDATC Bridge BranchNo ratings yet
- Stage Construction e TabsDocument10 pagesStage Construction e TabsLim Wee BengNo ratings yet
- Technological University of The PhilippinesDocument5 pagesTechnological University of The PhilippinesFrancis Jem ReyesNo ratings yet