You might also like
- Manual Ford Ranger Complete PDFDocument140 pagesManual Ford Ranger Complete PDFMiguel Angel Perez100% (4)
- Monster of The Week Players GuideDocument89 pagesMonster of The Week Players GuideNikola Dredge Tristani100% (3)
- Resampling Methods For Time SeriesDocument5 pagesResampling Methods For Time SeriesMark Carlos SecadaNo ratings yet
- 1.1 Parametric and Nonparametric Statistical InferenceDocument8 pages1.1 Parametric and Nonparametric Statistical InferencemuralidharanNo ratings yet
- R300 Advanced Econometrics Methods Lecture SlidesDocument362 pagesR300 Advanced Econometrics Methods Lecture SlidesMarco BrolliNo ratings yet
- The General Framework of Interval EstimationDocument2 pagesThe General Framework of Interval Estimationgibadew959No ratings yet
- PSet 7Document2 pagesPSet 7Alexander QuNo ratings yet
- MIT14 30s09 Lec24Document7 pagesMIT14 30s09 Lec24NobodyNo ratings yet
- 10 Meanvector PDFDocument10 pages10 Meanvector PDFGech YouNo ratings yet
- Rousseeuwhubert Highbdmultivariatelocscatter FestsDocument19 pagesRousseeuwhubert Highbdmultivariatelocscatter FestsEduardoPacaNo ratings yet
- Uniform Random Number GeneratorsDocument8 pagesUniform Random Number GeneratorsPaul Carty SorianoNo ratings yet
- Distance To Default: Marco Avellaneda and Jingyi ZhuDocument5 pagesDistance To Default: Marco Avellaneda and Jingyi ZhuraqthesolidNo ratings yet
- Note-Stat Ch2 EstimationDocument8 pagesNote-Stat Ch2 EstimationRHLNo ratings yet
- 2.august 10 Class NotesDocument3 pages2.august 10 Class Notesman humanNo ratings yet
- Chapter 1 BDocument35 pagesChapter 1 BemilyNo ratings yet
- 3rd Partial Collaborative Activity #1Document2 pages3rd Partial Collaborative Activity #1Javier Cedillo SanchezNo ratings yet
- Si NotesDocument58 pagesSi NotesguukizlNo ratings yet
- MIT14 30s09 Lec17Document9 pagesMIT14 30s09 Lec17Thahir HussainNo ratings yet
- Chapter 8 Estimation of Parameters and Fitting of Probability DistributionsDocument20 pagesChapter 8 Estimation of Parameters and Fitting of Probability DistributionshoithanhNo ratings yet
- MIT18.650. Statistics For Applications Fall 2016. Problem Set 3Document3 pagesMIT18.650. Statistics For Applications Fall 2016. Problem Set 3yilvasNo ratings yet
- Exam 2 RevDocument4 pagesExam 2 RevAgung FerdiansyahNo ratings yet
- Maximum Likelihood EstimationDocument6 pagesMaximum Likelihood EstimationErick VargasNo ratings yet
- 1 Intro HandoutDocument36 pages1 Intro HandoutAlessandro SinaiNo ratings yet
- Random Variables PDFDocument90 pagesRandom Variables PDFNJNo ratings yet
- Stanford Stats 200Document6 pagesStanford Stats 200Jung Yoon SongNo ratings yet
- The Exponential DistributionDocument5 pagesThe Exponential Distributiontarek mahmoudNo ratings yet
- Sufficient Statistics - Problems - Solved - Xiang - YinDocument5 pagesSufficient Statistics - Problems - Solved - Xiang - YinSaksham JainNo ratings yet
- Information Theory: 1 Random Variables and Probabilities XDocument8 pagesInformation Theory: 1 Random Variables and Probabilities XShashi SumanNo ratings yet
- Arena Stanfordlecturenotes11Document9 pagesArena Stanfordlecturenotes11Victoria MooreNo ratings yet
- Maximum Likelihood EstimationDocument8 pagesMaximum Likelihood EstimationSORN CHHANNYNo ratings yet
- Module 33 Statistical Inference Problems: Point EstimationDocument59 pagesModule 33 Statistical Inference Problems: Point Estimationpankaj kumarNo ratings yet
- MIT18 S096F13 Pset2Document4 pagesMIT18 S096F13 Pset2TheoNo ratings yet
- Statistics 3858: Statistical Models, Parameter Space and IdentifiabilityDocument6 pagesStatistics 3858: Statistical Models, Parameter Space and IdentifiabilityGustavo Guerra GeraldiniNo ratings yet
- Randomization of Affine Diffusion ProcessesDocument40 pagesRandomization of Affine Diffusion ProcessesBartosz BieganowskiNo ratings yet
- Homework 5 Solve For The Midterm Test .Document3 pagesHomework 5 Solve For The Midterm Test .Sawsan AbiibNo ratings yet
- AMA2104 Probability and Engineering Statistics 2 Probability DistributionDocument37 pagesAMA2104 Probability and Engineering Statistics 2 Probability DistributionYH CHENGNo ratings yet
- Lecture 5 - Dirac Delta Functions, Characteristic Functions, and The Law of Large NumbersDocument3 pagesLecture 5 - Dirac Delta Functions, Characteristic Functions, and The Law of Large NumbersRobert WexlerNo ratings yet
- The University of NottinghamDocument6 pagesThe University of Nottinghammeettoavi059No ratings yet
- 1 Sufficient Statistics: I I N I 1 I N I 1 IDocument5 pages1 Sufficient Statistics: I I N I 1 I N I 1 IHoghunsholaStephenAdeshinaNo ratings yet
- Lecture 3Document32 pagesLecture 3Virat BhangeNo ratings yet
- Sufficient Statistics and Exponential FamilyDocument11 pagesSufficient Statistics and Exponential Familyuser31415No ratings yet
- BayesianFrequencyAnalysisOfExtremeRiverDischarges JVN MDDocument10 pagesBayesianFrequencyAnalysisOfExtremeRiverDischarges JVN MDViswanath KoduruNo ratings yet
- Numerical ProbabilityDocument16 pagesNumerical Probabilityelintelectual05No ratings yet
- Chapter 7 - 7.3, 7.4 Nalanda PDFDocument31 pagesChapter 7 - 7.3, 7.4 Nalanda PDFAman BhatiaNo ratings yet
- BasicsDocument61 pagesBasicsmaxNo ratings yet
- Data Analysis For Social Scientists (14.1310x)Document12 pagesData Analysis For Social Scientists (14.1310x)SebastianNo ratings yet
- Agricultural Land Use in KeralaDocument5 pagesAgricultural Land Use in KeralaavsanthoshNo ratings yet
- StabilityDocument103 pagesStabilityIghalo osedebamen DanielNo ratings yet
- Monte-Carlo Methods For Single-And Multi-Factor Models: 1 Simulating Stochastic Differential EquationsDocument11 pagesMonte-Carlo Methods For Single-And Multi-Factor Models: 1 Simulating Stochastic Differential EquationscarreragerardoNo ratings yet
- Lecture 5Document6 pagesLecture 5Jung Yoon SongNo ratings yet
- Point Estimation: Definition of EstimatorsDocument8 pagesPoint Estimation: Definition of EstimatorsUshnish MisraNo ratings yet
- 1.august 8 Class NotesDocument3 pages1.august 8 Class Notesman humanNo ratings yet
- Feng Yu Notes On MartingalesDocument18 pagesFeng Yu Notes On MartingalesMatías Perez ZabalaNo ratings yet
- 10-701/15-781, Machine Learning: Homework 1: Aarti Singh Carnegie Mellon UniversityDocument6 pages10-701/15-781, Machine Learning: Homework 1: Aarti Singh Carnegie Mellon Universitytarun guptaNo ratings yet
- BootstrapDocument17 pagesBootstrapErizelle Anne BrunoNo ratings yet
- A.5 Stationary and Non-Stationary StatesDocument9 pagesA.5 Stationary and Non-Stationary StatesBaban BaidyaNo ratings yet
- Special Continuous Probability Distributions - Exponential Distribution - Weibull DistributionDocument24 pagesSpecial Continuous Probability Distributions - Exponential Distribution - Weibull DistributionPrashant SinghNo ratings yet
- Empirical ProcessesDocument47 pagesEmpirical Processesalin444444No ratings yet
- Unit-16 IGNOU STATISTICSDocument16 pagesUnit-16 IGNOU STATISTICSCarbidemanNo ratings yet
- Maximum Likelihood EstimationDocument7 pagesMaximum Likelihood Estimationnandini bhalekarNo ratings yet
- BinomialDocument3 pagesBinomialNEERAJ KUMARNo ratings yet
- Elgenfunction Expansions Associated with Second Order Differential EquationsFrom EverandElgenfunction Expansions Associated with Second Order Differential EquationsNo ratings yet
- Usg Durock Cement Board With Edgeguard Installation Guide en CB237EGDocument8 pagesUsg Durock Cement Board With Edgeguard Installation Guide en CB237EGFarras FauzanNo ratings yet
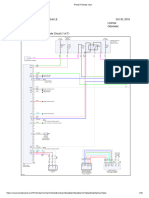
- Engine Coolant Temp SensorDocument29 pagesEngine Coolant Temp Sensorგიორგი ჯიქიძეNo ratings yet
- NEM - Main Guidelines & Schedule 1 (Amendment 2019)Document29 pagesNEM - Main Guidelines & Schedule 1 (Amendment 2019)Tan Kang YaoNo ratings yet
- Embodied IntelligenceDocument31 pagesEmbodied IntelligenceNagendra KumarNo ratings yet
- Analysis of Aquifer Pumping Test Data ToDocument19 pagesAnalysis of Aquifer Pumping Test Data ToFisseha TekaNo ratings yet
- PDF 20221128 184203 0000Document20 pagesPDF 20221128 184203 0000Ana StolpovencoNo ratings yet
- 1 Mtap ReviewerDocument2 pages1 Mtap ReviewerKristel Andrea VillanuevaNo ratings yet
- Accumet PH Meter ManualDocument16 pagesAccumet PH Meter ManualCraig McelroyNo ratings yet
- Sport - Cardiology Course - Program PDFDocument4 pagesSport - Cardiology Course - Program PDFNico IonaşcuNo ratings yet
- Cheat Game PS2 LIST ADocument74 pagesCheat Game PS2 LIST ASigit WicaksonoNo ratings yet
- Dry Chemical PowderDocument4 pagesDry Chemical Powdervisio20040% (1)
- Trial Mix BetonDocument4 pagesTrial Mix BetonSudirman STNo ratings yet
- BADMINTONDocument4 pagesBADMINTONAngelica MorcozoNo ratings yet
- OM Assignment 01-Vikrant Singh Tomar (19MBAR0331)Document11 pagesOM Assignment 01-Vikrant Singh Tomar (19MBAR0331)Vikrant SinghNo ratings yet
- Curriculum Map in Tle 7 Subject: Tle Grade Level: Grade 7 TEACHER: Mr. Israel M. MarquezDocument31 pagesCurriculum Map in Tle 7 Subject: Tle Grade Level: Grade 7 TEACHER: Mr. Israel M. MarquezIsrael Marquez0% (1)
- Timbercrete Structural Design-2Document30 pagesTimbercrete Structural Design-2kevin_au18No ratings yet
- Judul 3Document41 pagesJudul 3deyapertala062004No ratings yet
- Finalreport PDFDocument47 pagesFinalreport PDFNelCamHerNo ratings yet
- Isotope Practice QuestionsDocument5 pagesIsotope Practice QuestionsocNo ratings yet
- Prelims Rizal DocsDocument30 pagesPrelims Rizal DocsIrish RonquilloNo ratings yet
- Southwest Airlines PresentationDocument35 pagesSouthwest Airlines Presentationmterry04100% (1)
- An Aphrodisiac Uses and Benefits - White PaperDocument4 pagesAn Aphrodisiac Uses and Benefits - White PaperScott36100% (2)
- PDF Official Sat Study Guide Sample Math Questions Student Produced ResponseDocument12 pagesPDF Official Sat Study Guide Sample Math Questions Student Produced ResponseAmaan SurtiNo ratings yet
- A Low Cost 3D Printer With Basic ToolsDocument171 pagesA Low Cost 3D Printer With Basic ToolsJose Luis SabinoNo ratings yet
- Wi-Fi Fingerprinting-Based Floor Detection Using Adaptive Scaling and Weighted Autoencoder Extreme Learning MachineDocument12 pagesWi-Fi Fingerprinting-Based Floor Detection Using Adaptive Scaling and Weighted Autoencoder Extreme Learning MachineCSIT iaesprimeNo ratings yet
- UT Dallas Syllabus For Phys3411.001.11f Taught by Paul Mac Alevey (Paulmac)Document14 pagesUT Dallas Syllabus For Phys3411.001.11f Taught by Paul Mac Alevey (Paulmac)UT Dallas Provost's Technology GroupNo ratings yet
- Nursery Raising of Vegetables CropsDocument7 pagesNursery Raising of Vegetables Cropsronalit malintad100% (2)
- 10global Status 2Document16 pages10global Status 2Vaibhav MuddebihalNo ratings yet