You might also like
- W5500 UDP Problem - Open Hardware - W5500 Ethernet Shield - WIZnet Developer ForumDocument8 pagesW5500 UDP Problem - Open Hardware - W5500 Ethernet Shield - WIZnet Developer Forumbokic88No ratings yet
- HAL User ManualDocument115 pagesHAL User Manualbokic88No ratings yet
- How To Manage Interrupts With Same Priority With A... - Infineon Developer CommunityDocument4 pagesHow To Manage Interrupts With Same Priority With A... - Infineon Developer Communitybokic88No ratings yet
- PacSci Servo Motor Selection DatasheetDocument50 pagesPacSci Servo Motor Selection Datasheetbokic88No ratings yet
- PacSci Servo Motor Mounting Dimensions ManualDocument10 pagesPacSci Servo Motor Mounting Dimensions Manualbokic88No ratings yet
- Field Manual For CeedlingDocument99 pagesField Manual For Ceedlingbokic88100% (1)
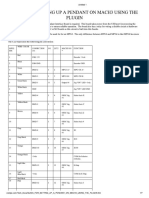
- MPGDocument7 pagesMPGbokic88No ratings yet
- Sliding Mode Controller Design For Controlling The Speed of A DC MotorDocument5 pagesSliding Mode Controller Design For Controlling The Speed of A DC Motorbokic88No ratings yet
- Electronics 08 00030Document17 pagesElectronics 08 00030bokic88No ratings yet
- AN2002 Application Note: Using The Demoboard For The TD350 Advanced IGBT DriverDocument8 pagesAN2002 Application Note: Using The Demoboard For The TD350 Advanced IGBT Driverbokic88No ratings yet
- Tie Rod Cylinders, Series TRB: 32-100 MM Dia., Double-Acting, Cushioning, Proximity SwitchingDocument1 pageTie Rod Cylinders, Series TRB: 32-100 MM Dia., Double-Acting, Cushioning, Proximity Switchingbokic88No ratings yet
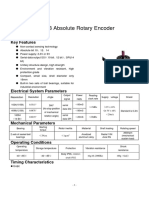
- HAE18 Absolute Rotary Encoder: Key FeaturesDocument4 pagesHAE18 Absolute Rotary Encoder: Key Featuresbokic88No ratings yet
- Advanced IGBT/MOSFET Driver: ApplicationsDocument18 pagesAdvanced IGBT/MOSFET Driver: Applicationsbokic88No ratings yet
- Phoenix Contacts Mcr-Adc 12 Adc ConvertersDocument2 pagesPhoenix Contacts Mcr-Adc 12 Adc Convertersbokic88No ratings yet
- Data Sheet For Angle Sensors: Optical Encoders Series MHL40Document6 pagesData Sheet For Angle Sensors: Optical Encoders Series MHL40bokic88No ratings yet
- Three-Phase Motor Control With STM32F401RET6U: B L D CDocument34 pagesThree-Phase Motor Control With STM32F401RET6U: B L D Cbokic88No ratings yet
- TL431 Shunt Regulator CircuitDocument7 pagesTL431 Shunt Regulator Circuitbokic88No ratings yet
- Freescale Sensor Fusion For Kinetis Product Development Kit User GuideDocument46 pagesFreescale Sensor Fusion For Kinetis Product Development Kit User Guidebokic88No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Numerical Study On Rear Spoiler of Passenger VehicleDocument6 pagesA Numerical Study On Rear Spoiler of Passenger VehicleKongala Vamsi KrishnaNo ratings yet
- Isx cm870 VolvoDocument5 pagesIsx cm870 VolvoWalterNo ratings yet
- Experiment No. 4 - PROJECTILE Using Phet SimulationDocument6 pagesExperiment No. 4 - PROJECTILE Using Phet SimulationMaica ElliNo ratings yet
- Submittal: Job Title: Elevation: (FT) Date: Submitted By: John DoeDocument35 pagesSubmittal: Job Title: Elevation: (FT) Date: Submitted By: John Doejfher87No ratings yet
- Secrets of A Cam DesignerDocument40 pagesSecrets of A Cam Designerncampagna8134100% (2)
- Experiment 5 (The Specific Latent Heat of Vaporization)Document3 pagesExperiment 5 (The Specific Latent Heat of Vaporization)shark eyeNo ratings yet
- Lehf0246-00 Geh249-1Document4 pagesLehf0246-00 Geh249-1Mohamed SayedNo ratings yet
- AB400# Model Coding Decoding SheetsDocument7 pagesAB400# Model Coding Decoding SheetsAjay ChodankarNo ratings yet
- Vdu Fire StarinerDocument6 pagesVdu Fire StarinerkrishnanshwetaNo ratings yet
- Omae2009-79778 - Advanced Dynamic Stability AnalysisDocument13 pagesOmae2009-79778 - Advanced Dynamic Stability AnalysisschpiplikNo ratings yet
- Edit of Inspection BWG: 483013: 125.be04: Aumund Fördertechnik GMBHDocument16 pagesEdit of Inspection BWG: 483013: 125.be04: Aumund Fördertechnik GMBHademgsNo ratings yet
- PMI Full HottapDocument90 pagesPMI Full HottapMoustafa Fares100% (1)
- Analysis Experiment 8Document3 pagesAnalysis Experiment 8natlas100% (3)
- Manual Servicio DWF 241pw Pwa (Edit)Document38 pagesManual Servicio DWF 241pw Pwa (Edit)Anonymous WTGcrVNo ratings yet
- Lec 6, 7 and 8 - Kinematics of Fluid FlowDocument62 pagesLec 6, 7 and 8 - Kinematics of Fluid Flowlucifer pandeyNo ratings yet
- HLS-220 D 750.23.5.028 (031033036043) - EnglischDocument13 pagesHLS-220 D 750.23.5.028 (031033036043) - EnglischRainNo ratings yet
- SM ZW180 5B PDFDocument61 pagesSM ZW180 5B PDFAgus ainur0% (1)
- The Aerodynamic Interaction Between An Inverted Wing and A Rotating WheelDocument13 pagesThe Aerodynamic Interaction Between An Inverted Wing and A Rotating WheelVyssionNo ratings yet
- Engine C18Document3 pagesEngine C18Putra JawaNo ratings yet
- Plant MaintenanceDocument18 pagesPlant MaintenanceSalim82 LK100% (5)
- Pigeon Engine I3 660.jbeamDocument10 pagesPigeon Engine I3 660.jbeamanimations animationsNo ratings yet
- FPM 222 Checklist PlumbingDocument4 pagesFPM 222 Checklist PlumbingAarnav SinghNo ratings yet
- 3D Simulation (5MW) of Wind Turbine Rotors at Full Scale. Part I - GeometryDocument29 pages3D Simulation (5MW) of Wind Turbine Rotors at Full Scale. Part I - GeometryAbdel Salam AlsabaghNo ratings yet
- 22 05 23 - General-Duty Valves For Plumbing Piping PDFDocument6 pages22 05 23 - General-Duty Valves For Plumbing Piping PDFsyedNo ratings yet
- Currently Dismantling - Linkbelt HC218 (7/27/20)Document1,157 pagesCurrently Dismantling - Linkbelt HC218 (7/27/20)All Parts Inc.No ratings yet
- Gap Conductor Brief Write UpDocument6 pagesGap Conductor Brief Write Upfixer_007722No ratings yet
- Fixed BeamDocument14 pagesFixed BeamOsaka Bundle100% (2)
- 7118-0244 Ilizarov - TSF Pocket Ref ChartDocument12 pages7118-0244 Ilizarov - TSF Pocket Ref ChartFlorin MacarieNo ratings yet
- En Power Master IIIDocument4 pagesEn Power Master IIIdarwin100% (1)
- Hybrid and Electric VehiclesDocument26 pagesHybrid and Electric VehiclesJohn Carl Tiburcio100% (1)