You might also like
- Those Who Serve - Stephen Melillo (Score)Document22 pagesThose Who Serve - Stephen Melillo (Score)Fernando RamiresNo ratings yet
- GeographyDocument18 pagesGeographyAshley Morgan88% (8)
- My Heart Sings Praises - Line UpDocument4 pagesMy Heart Sings Praises - Line UpAnthony JimenezNo ratings yet
- Aronne Armanini (Auth.) - Principles of River Hydraulics-Springer International Publishing (2018)Document230 pagesAronne Armanini (Auth.) - Principles of River Hydraulics-Springer International Publishing (2018)Matija LozicNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Geotechnical Module: Powerful Software Featuring Intuitive WorkflowDocument4 pagesGeotechnical Module: Powerful Software Featuring Intuitive WorkflowMuhammadAviCennaNo ratings yet
- Galeo Wa430-6 PDFDocument1,612 pagesGaleo Wa430-6 PDFWalter100% (1)
- Theme ParkDocument30 pagesTheme ParksassydhineNo ratings yet
- MIT Métodos MatemáticosDocument136 pagesMIT Métodos MatemáticosEsthefano Morales CampañaNo ratings yet
- NetWorking Flashcards - QuizletDocument262 pagesNetWorking Flashcards - QuizletGB ReddyNo ratings yet
- PRACH Optimization - V1Document11 pagesPRACH Optimization - V1Tulipe Pivoine100% (5)
- Lectures 13Document17 pagesLectures 13Omed. HNo ratings yet
- Introduction to First Order Partial Differential EquationsDocument22 pagesIntroduction to First Order Partial Differential EquationsPuwa CalvinNo ratings yet
- DR Ajmal Ali Department of Mathematics, Virtual University of PakistanDocument207 pagesDR Ajmal Ali Department of Mathematics, Virtual University of Pakistanmati ullahNo ratings yet
- PDE Note5Document5 pagesPDE Note5SHIVOM KUNDUNo ratings yet
- Lecture 1Document5 pagesLecture 1ahmadyonis55tNo ratings yet
- MTL 603 Lecture Notes on Partial Differential EquationsDocument8 pagesMTL 603 Lecture Notes on Partial Differential EquationsvamgaduNo ratings yet
- MAT 2165 Lecture 5Document4 pagesMAT 2165 Lecture 59cvxx9nqbfNo ratings yet
- Partial Differential EquationsDocument11 pagesPartial Differential EquationsSaadFarooqNo ratings yet
- Differential Equations Notes Chapters 1-3Document7 pagesDifferential Equations Notes Chapters 1-3bwahahahaNo ratings yet
- 1 Introduction To Partial Differential Equations: 1.1 Boundary and Initial Value ProblemsDocument6 pages1 Introduction To Partial Differential Equations: 1.1 Boundary and Initial Value ProblemsElohim Ortiz CaballeroNo ratings yet
- Course Handout MAT 201: Partial Differential Equations and Complex Analysis Module 1: Partial Differential EquationsDocument37 pagesCourse Handout MAT 201: Partial Differential Equations and Complex Analysis Module 1: Partial Differential EquationsjoeyNo ratings yet
- Ma1002: (Ordinary Differential Equations) : Part-I: First Oder OdesDocument31 pagesMa1002: (Ordinary Differential Equations) : Part-I: First Oder OdesVishal KumarNo ratings yet
- PDEs Notes 1Document15 pagesPDEs Notes 19cvxx9nqbfNo ratings yet
- MTH305Document83 pagesMTH305EmpireFly InternationalNo ratings yet
- Chapters 1-2 Lecture NotesDocument62 pagesChapters 1-2 Lecture NotespastelgorengNo ratings yet
- aPDEs PAN2008 - UnknownDocument107 pagesaPDEs PAN2008 - Unknownepie essongolle godfredNo ratings yet
- Differential Equations: Course Module 3Document11 pagesDifferential Equations: Course Module 3Lorielle OlivaNo ratings yet
- Dif LecturenotesDocument168 pagesDif LecturenotesbaransakirhvhNo ratings yet
- 4Document16 pages4DAVIDNo ratings yet
- Ordinary Differential Equations 1: Dhriti Ranjan DolaiDocument31 pagesOrdinary Differential Equations 1: Dhriti Ranjan DolaiSoumya Ranjan SahooNo ratings yet
- ODE Introduction and ClassificationDocument12 pagesODE Introduction and ClassificationMus'ab UsmanNo ratings yet
- Chapter 1Document11 pagesChapter 1Charmaine ChuNo ratings yet
- 6 Jointly Continuous Random Variables: 6.1 Joint Density FunctionsDocument11 pages6 Jointly Continuous Random Variables: 6.1 Joint Density FunctionsSoumen MondalNo ratings yet
- PDEDocument39 pagesPDEchandra kantNo ratings yet
- 6 Jointly Continuous Random Variables: 6.1 Joint Density FunctionsDocument23 pages6 Jointly Continuous Random Variables: 6.1 Joint Density FunctionsAbdalmoedAlaiashyNo ratings yet
- APM502HTDocument191 pagesAPM502HTDocRaphNo ratings yet
- MTH 203Document15 pagesMTH 203shayandevNo ratings yet
- Chapter 1 Ordinary Diffrential Equations-JADocument27 pagesChapter 1 Ordinary Diffrential Equations-JAعبدالكريم الدليميNo ratings yet
- Differential EquationsDocument11 pagesDifferential Equationsabhishekv0697No ratings yet
- Differential Equations MATH C241: Class Hours: T TH S 2 (9.00 A.M. To 9.50 A.M.)Document43 pagesDifferential Equations MATH C241: Class Hours: T TH S 2 (9.00 A.M. To 9.50 A.M.)Siddartha PetetiNo ratings yet
- MATH2860 ODE Lecture0 IntroDocument8 pagesMATH2860 ODE Lecture0 IntroDanah Al ShemarieNo ratings yet
- Chapter 03 Higher Order Linear ODEsDocument10 pagesChapter 03 Higher Order Linear ODEsSider HsiaoNo ratings yet
- Phys.303-Classical Mechanics Ii - Lectur PDFDocument184 pagesPhys.303-Classical Mechanics Ii - Lectur PDFZaviraNabillaNo ratings yet
- Topic 3 SummaryDocument2 pagesTopic 3 SummaryyouzhattyNo ratings yet
- 3 Solving First Order Linear PDE: A (X, Y) U C U (X, Y)Document6 pages3 Solving First Order Linear PDE: A (X, Y) U C U (X, Y)Mohamed MenaaNo ratings yet
- Lecture 2Document5 pagesLecture 2ahmadyonis55tNo ratings yet
- Lecture - I: 1 Introduction To Differential EquationDocument6 pagesLecture - I: 1 Introduction To Differential EquationAbdur Rehman KharalNo ratings yet
- De - Chapter 1Document7 pagesDe - Chapter 1May Ann AceraNo ratings yet
- 1.1 Motivation: X X 2 I J 2 X X X XDocument4 pages1.1 Motivation: X X 2 I J 2 X X X XpincoNo ratings yet
- section1Document23 pagessection1Ivan WilleNo ratings yet
- Intro to Diff Eq: Classifying ODEs by Type, Order, LinearityDocument16 pagesIntro to Diff Eq: Classifying ODEs by Type, Order, LinearityChristian FranciscoNo ratings yet
- CE603: Partial Differential Equations (Instructor's Scribble) Expected OutcomeDocument12 pagesCE603: Partial Differential Equations (Instructor's Scribble) Expected OutcomeShreshth SinghNo ratings yet
- Integ Equ Phys571 T131Document19 pagesInteg Equ Phys571 T131raoni_jampaNo ratings yet
- Introduction to PDEs Class NotesDocument8 pagesIntroduction to PDEs Class Notesomonda_niiNo ratings yet
- Linear PDE With Constant Coefficients: Pinaki PalDocument54 pagesLinear PDE With Constant Coefficients: Pinaki PalKingshuk MukherjeeNo ratings yet
- CourseNotes1 1Document19 pagesCourseNotes1 1api-3835421No ratings yet
- Graphing functions and calculating partial derivativesDocument10 pagesGraphing functions and calculating partial derivativesnastia_splinNo ratings yet
- Differential EquationDocument7 pagesDifferential EquationRonaldNo ratings yet
- PDE Lecture NotesDocument92 pagesPDE Lecture Notes6tzfhrb4khNo ratings yet
- Pde Part IDocument8 pagesPde Part IBijivemula Sruthi ReddyNo ratings yet
- All Chapters NoteDocument272 pagesAll Chapters NoteMike BelayNo ratings yet
- ODE Fundamentals: Classification, Solutions and ApplicationsDocument16 pagesODE Fundamentals: Classification, Solutions and ApplicationsShehroze Khan Nyaze Noori khelNo ratings yet
- Introduction to Partial Differential EquationsDocument6 pagesIntroduction to Partial Differential Equationsbiswadarshee beheraNo ratings yet
- Week 3Document20 pagesWeek 3Venkat KarthikeyaNo ratings yet
- Differential Equations-1st Order, 1st DegreeDocument9 pagesDifferential Equations-1st Order, 1st DegreeVince Rabin CandidatoNo ratings yet
- All Lectures Math3Document61 pagesAll Lectures Math3abbasovn2005No ratings yet
- Variable Coe Cient, Second Order, Linear, Ordinary Differential EquationsDocument4 pagesVariable Coe Cient, Second Order, Linear, Ordinary Differential EquationsKathiresan ManickamNo ratings yet
- Lecture Notes in Partial Differential Equations Third Edition by Tadeusz STY SDocument31 pagesLecture Notes in Partial Differential Equations Third Edition by Tadeusz STY SAgang SereroNo ratings yet
- GalvanometerDocument4 pagesGalvanometerAli Hyder KolachiNo ratings yet
- Logic GatesDocument4 pagesLogic GatesAli Hyder KolachiNo ratings yet
- Fourier SeriesDocument16 pagesFourier SeriesAli Hyder KolachiNo ratings yet
- Applications of HODEsDocument4 pagesApplications of HODEsAli Hyder KolachiNo ratings yet
- Applications of HODEsDocument4 pagesApplications of HODEsAli Hyder KolachiNo ratings yet
- Rear Axle ShaftsDocument4 pagesRear Axle ShaftsMaria AparecidaNo ratings yet
- The Girls Center: 2023 Workout CalendarDocument17 pagesThe Girls Center: 2023 Workout Calendark4270621No ratings yet
- Resumen en Ingles Del Diario Ana Frank Chisaguano EmilyDocument16 pagesResumen en Ingles Del Diario Ana Frank Chisaguano EmilyChisaguano EmilyNo ratings yet
- Epidemiology and Etiology of Peptic Ulcer DiseaseDocument5 pagesEpidemiology and Etiology of Peptic Ulcer DiseaseDeepali Mahajan ChaudhariNo ratings yet
- Coastal Wall FinalDocument8 pagesCoastal Wall Finalapi-508287240No ratings yet
- RTC Invoice 2965 Gj29es2223100505Document1 pageRTC Invoice 2965 Gj29es2223100505Alok PandeyNo ratings yet
- DC TC 600 L, 01.00, enDocument61 pagesDC TC 600 L, 01.00, enDarkNo ratings yet
- Adjectives AllDocument35 pagesAdjectives AllJOHN SEBASTIAN PARDO LARANo ratings yet
- Herman Pardamean Hutabarat: Mechanical EngineerDocument3 pagesHerman Pardamean Hutabarat: Mechanical EngineerHerman HutabaratNo ratings yet
- Final QuesDocument5 pagesFinal QuesMani KumarNo ratings yet
- Analytical Reasoning Skills Part ADocument30 pagesAnalytical Reasoning Skills Part AAhmad MiftahulNo ratings yet
- Air-To-Air Claims and Credits For Navy and Marine Corps Patrol Type Aircraft During World War II (Appendix 4)Document18 pagesAir-To-Air Claims and Credits For Navy and Marine Corps Patrol Type Aircraft During World War II (Appendix 4)MCGunnerNo ratings yet
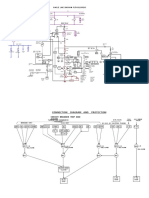
- Diagram PLTA SLJDocument4 pagesDiagram PLTA SLJMEi Cuiet Luph-LuPhNo ratings yet
- Bsczo 201Document280 pagesBsczo 201ishfaqqqNo ratings yet
- Family Nomenclature and Same-Name Divinities in Roman Religion and MythologyDocument17 pagesFamily Nomenclature and Same-Name Divinities in Roman Religion and MythologyhNo ratings yet
- Greenheck Facilities Guide - Locations and Details in Schofield & Mosinee WIDocument1 pageGreenheck Facilities Guide - Locations and Details in Schofield & Mosinee WIRicardo Ruy PeñaNo ratings yet
- 14BBG - Sec16 - NPRHD NQR NRR Diesel Cab Chassis Electrical-0215113 FinalDocument34 pages14BBG - Sec16 - NPRHD NQR NRR Diesel Cab Chassis Electrical-0215113 FinalIgmar Franco Negrete100% (2)
- Humidity Chamber Tek For Fruiting BRF Cakes - Mushroom Cultivation - Shroomery Message BoardDocument15 pagesHumidity Chamber Tek For Fruiting BRF Cakes - Mushroom Cultivation - Shroomery Message BoardABIYA UNIVERSENo ratings yet
- 23 Section I GW Glasses Window System and MirrorsDocument58 pages23 Section I GW Glasses Window System and Mirrorsamir8100No ratings yet
- Fishing and Hunting Gear From Osseous Raw Materials in The Early Neolithic From SerbiaDocument12 pagesFishing and Hunting Gear From Osseous Raw Materials in The Early Neolithic From SerbiaDanaGrujićNo ratings yet
- TextDocument17 pagesTextnaser zoabiNo ratings yet