You might also like
- Eee2005 Digital-Signal-Processing Eth 2.0!0!40 Eee 2005 Digital Signal ProcessingDocument3 pagesEee2005 Digital-Signal-Processing Eth 2.0!0!40 Eee 2005 Digital Signal ProcessingAnhileshNo ratings yet
- P1 IntroDocument35 pagesP1 IntroPARTHA BANERJEENo ratings yet
- EC 614: Adaptive Signal Processing Techniques: Course Instructor: Dr. Debashis GhoshDocument56 pagesEC 614: Adaptive Signal Processing Techniques: Course Instructor: Dr. Debashis GhoshUtkarsh GuptaNo ratings yet
- Theory and Utility of FT-NIR Spectroscopy: An Introduction To Nicolet Antaris FT-NIR AnalyzersDocument105 pagesTheory and Utility of FT-NIR Spectroscopy: An Introduction To Nicolet Antaris FT-NIR Analyzersmirzaripon100% (1)
- Unit 4Document58 pagesUnit 4Sugumar Sar DuraiNo ratings yet
- BiomedSignalDocument74 pagesBiomedSignalKhánh Ly TrịnhNo ratings yet
- Adaptive Filter Text: Digital Signal Processing by Li Tan, Chapter 10Document21 pagesAdaptive Filter Text: Digital Signal Processing by Li Tan, Chapter 10Jiachyi YeohNo ratings yet
- Introduction to Digital Filters in Embedded DSPDocument41 pagesIntroduction to Digital Filters in Embedded DSPअमरेश झाNo ratings yet
- Linear & Non-Linear Filtering, Fast Fourier Transformation Theory, State Estimation, Pattern Recognition, Identification TheoryDocument34 pagesLinear & Non-Linear Filtering, Fast Fourier Transformation Theory, State Estimation, Pattern Recognition, Identification TheoryA. Andaya LestariNo ratings yet
- Em D P: I N o L: Bedde DS Ntroductio T Digita FiltersDocument19 pagesEm D P: I N o L: Bedde DS Ntroductio T Digita FiltersAlex YangNo ratings yet
- Digital BeamformingDocument51 pagesDigital BeamformingRobin SinghNo ratings yet
- Adaptive Filtering Techniques for Noise ReductionDocument35 pagesAdaptive Filtering Techniques for Noise ReductionLouis NjorogeNo ratings yet
- FULLTEXT01Document66 pagesFULLTEXT01Vishnu PriyaNo ratings yet
- Reprort On Adaptive Filter 1Document38 pagesReprort On Adaptive Filter 1Hachem ElyousfiNo ratings yet
- Laser Doppler Anemometry: Introduction To Principles and ApplicationsDocument25 pagesLaser Doppler Anemometry: Introduction To Principles and ApplicationsAdyant AgrawalNo ratings yet
- Data Processing: - As A Science Major, You Will All Eventually Have To Deal With DataDocument13 pagesData Processing: - As A Science Major, You Will All Eventually Have To Deal With Dataosborne kachajeNo ratings yet
- Adaptive FiltersDocument23 pagesAdaptive FilterskimNo ratings yet
- Theory Report MajorDocument27 pagesTheory Report MajorRajni GulatiNo ratings yet
- Noise Reduction in Speech Signals: Digital Signal ProcessingDocument11 pagesNoise Reduction in Speech Signals: Digital Signal ProcessingJames SmithNo ratings yet
- Chapter 3 TELE 511Document16 pagesChapter 3 TELE 511Carl KeaikitseNo ratings yet
- EEE6209 Part A Topic 01Document39 pagesEEE6209 Part A Topic 01dialauchennaNo ratings yet
- Digital Communication UNIT 2Document17 pagesDigital Communication UNIT 2Nihal GuptaNo ratings yet
- Farrukh Adsp Research PaperDocument4 pagesFarrukh Adsp Research PaperFarrukh TanveerNo ratings yet
- Construction of Optical FiltersDocument34 pagesConstruction of Optical FiltersAvnish KumarNo ratings yet
- Wcdma Soft HoDocument28 pagesWcdma Soft HoMostafa GaberNo ratings yet
- 3 Data ProcessingDocument13 pages3 Data ProcessingDr. Khan MuhammadNo ratings yet
- Design and Implementation of Butterworth, Chebyshev-I and Elliptic Filter For Speech Signal AnalysisDocument7 pagesDesign and Implementation of Butterworth, Chebyshev-I and Elliptic Filter For Speech Signal AnalysisrectifiedNo ratings yet
- Digital Design of Filters (FIR,IIR) -part1 ايادDocument19 pagesDigital Design of Filters (FIR,IIR) -part1 ايادMohammed YounisNo ratings yet
- Syllabus For ADSPDocument3 pagesSyllabus For ADSPanittadevadasNo ratings yet
- 173-Article Text-490-1-10-20181113 - 2Document9 pages173-Article Text-490-1-10-20181113 - 2Fa Mido ChemseddineNo ratings yet
- Adaptive Blind Noise Suppression in Some Speech Processing ApplicationsDocument5 pagesAdaptive Blind Noise Suppression in Some Speech Processing ApplicationsSai Swetha GNo ratings yet
- Data Processing and Fourier Analysis TechniquesDocument13 pagesData Processing and Fourier Analysis TechniquesYuniarti WijadiNo ratings yet
- Designing FIR Filters Using Window TechniquesDocument42 pagesDesigning FIR Filters Using Window TechniquesİBRAHİM YÜMLÜNo ratings yet
- Digital Filters: Michael KlingbeilDocument16 pagesDigital Filters: Michael KlingbeilJamesNo ratings yet
- SRM Valliammai Engineering College Optical Communication CourseDocument151 pagesSRM Valliammai Engineering College Optical Communication Coursesuresh kumarNo ratings yet
- Multimedia Systems: Sreeraj K. P. Asst. Professor, Dec, RsetDocument27 pagesMultimedia Systems: Sreeraj K. P. Asst. Professor, Dec, Rsetsujith_mathewNo ratings yet
- Unit I Signals and SystemsDocument3 pagesUnit I Signals and Systemsrajendr_46No ratings yet
- Fiber Optic Communication SystemsDocument50 pagesFiber Optic Communication SystemsTelugu SatyanarayanaNo ratings yet
- MultiRate 2Document178 pagesMultiRate 2IamINNo ratings yet
- FIR - and - IIR Filter - Design1Document20 pagesFIR - and - IIR Filter - Design1divyarajc073No ratings yet
- Digital Signal Processing for Audio Applications: Volume 1 - FormulaeFrom EverandDigital Signal Processing for Audio Applications: Volume 1 - FormulaeNo ratings yet
- Rajshahi University of Engineering & Technology: Heaven's Light Is Our GuideDocument18 pagesRajshahi University of Engineering & Technology: Heaven's Light Is Our GuideNur A Adam DonyNo ratings yet
- BM17601 Digital Signal Processing Techniques L T P CDocument1 pageBM17601 Digital Signal Processing Techniques L T P CJobin Christ MCNo ratings yet
- Adaptive Filtering Techniques for Speech Enhancement Using Noise SuppressionDocument18 pagesAdaptive Filtering Techniques for Speech Enhancement Using Noise SuppressionsudarshanNo ratings yet
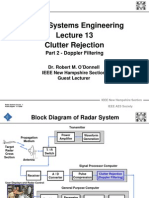
- Radar Systems Engineering Lecture 13 Clutter Rejection Part 2 - Doppler FilteringDocument67 pagesRadar Systems Engineering Lecture 13 Clutter Rejection Part 2 - Doppler FilteringneilwuNo ratings yet
- Flow Imaging Cardiac Ultrasound System: by Larry Miller PHDDocument28 pagesFlow Imaging Cardiac Ultrasound System: by Larry Miller PHDumarizkhNo ratings yet
- Adaptive Digital FiltersDocument10 pagesAdaptive Digital Filtersfantastic05No ratings yet
- Lab Sheet: Faculty of Engineering & TechnologyDocument12 pagesLab Sheet: Faculty of Engineering & TechnologyMun Kit ChokNo ratings yet
- Adaptive Blind Noise Suppression in Some Speech Processing ApplicationsDocument15 pagesAdaptive Blind Noise Suppression in Some Speech Processing Applicationsapi-26172869No ratings yet
- Lecture - 01 - IntroductionDocument33 pagesLecture - 01 - IntroductionAli HassanNo ratings yet
- Noise Reduction in Speech Signals: Digital Signal ProcessingHimanshu Tyagi (012) Naman Rajput (016Document11 pagesNoise Reduction in Speech Signals: Digital Signal ProcessingHimanshu Tyagi (012) Naman Rajput (016James SmithNo ratings yet
- Digitalfiltersnotes 15 Oct 2018Document15 pagesDigitalfiltersnotes 15 Oct 2018Gayatri ShindeNo ratings yet
- Phased Array UTDocument32 pagesPhased Array UTMathew John100% (1)
- Design of Dual-Band Bandpass Filter For GSM 950 MHZ and GSM 1850 MHZ Applications Using Lumped ComponentDocument7 pagesDesign of Dual-Band Bandpass Filter For GSM 950 MHZ and GSM 1850 MHZ Applications Using Lumped ComponentAHMED ALANINo ratings yet
- Detection and Cancellation of Jamming Signal Noise Using Digital Filters For Radar Applications Ch. KusmakumariDocument6 pagesDetection and Cancellation of Jamming Signal Noise Using Digital Filters For Radar Applications Ch. Kusmakumariarmando ibarraNo ratings yet
- DSP Lesson Plan for III Year IT StudentsDocument3 pagesDSP Lesson Plan for III Year IT StudentsVignesh SeshadriNo ratings yet
- ELE 774 Adaptive Signal Processing: Dr. Cenk Toker Block F3, Room: 3304/ADocument32 pagesELE 774 Adaptive Signal Processing: Dr. Cenk Toker Block F3, Room: 3304/AprakashroutNo ratings yet
- Speech Audio Processing Part IIDocument22 pagesSpeech Audio Processing Part IIFadhlanNo ratings yet
- Application of Adaptive FiltersDocument12 pagesApplication of Adaptive FiltersDollRaiNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- SSP 1 3 - Stochastic 3Document12 pagesSSP 1 3 - Stochastic 3Gabor GerebNo ratings yet
- SSP 1 2 - Stochastic 2Document14 pagesSSP 1 2 - Stochastic 2Gabor GerebNo ratings yet
- SSP 3 2 - Spectrum 2Document13 pagesSSP 3 2 - Spectrum 2Gabor GerebNo ratings yet
- SSP 2 1 Estimation 1Document13 pagesSSP 2 1 Estimation 1Gabor GerebNo ratings yet
- SSP 3 1 - Spectrum 1Document13 pagesSSP 3 1 - Spectrum 1Gabor GerebNo ratings yet
- SSP 1 1 - Stochastic 1Document10 pagesSSP 1 1 - Stochastic 1Gabor GerebNo ratings yet
- SSP 5 3 Music CodingDocument48 pagesSSP 5 3 Music CodingGabor GerebNo ratings yet
- Parameter Estimation OutlineDocument13 pagesParameter Estimation OutlineGabor GerebNo ratings yet
- Why learn signal processingDocument5 pagesWhy learn signal processingGabor GerebNo ratings yet
- How cell phones process speech signalsDocument49 pagesHow cell phones process speech signalsGabor GerebNo ratings yet
- SSP 4 1 - Modelling 1Document26 pagesSSP 4 1 - Modelling 1Gabor GerebNo ratings yet
- SSP 2 3 - DetectionDocument46 pagesSSP 2 3 - DetectionGabor GerebNo ratings yet
- SSP 4 2 - Modelling 2Document34 pagesSSP 4 2 - Modelling 2Gabor GerebNo ratings yet
- SO 1550 F3 User ManualDocument18 pagesSO 1550 F3 User ManualLidya SukendroNo ratings yet
- Warsaw Pact Order of Battle - 1989Document61 pagesWarsaw Pact Order of Battle - 1989Zero Knight100% (1)
- FREE BioGeometry Emitter PhotoDocument5 pagesFREE BioGeometry Emitter PhotoNisha Joshi75% (8)
- CA ruling on fertilizer disputeDocument16 pagesCA ruling on fertilizer disputeRuby Anna TorresNo ratings yet
- DCM300E Clamp Meter Measures Earth Leakage CurrentDocument2 pagesDCM300E Clamp Meter Measures Earth Leakage CurrentKatamba RogersNo ratings yet
- 2.1 Conditional Logic: Ladder ProgrammingDocument10 pages2.1 Conditional Logic: Ladder ProgrammingLuka NikitovicNo ratings yet
- RICEFW Explained - Customization and Changes in SAPDocument20 pagesRICEFW Explained - Customization and Changes in SAPRoshan AhireNo ratings yet
- cobas8000-DataManager - Host Interface Manual10205 PDFDocument286 pagescobas8000-DataManager - Host Interface Manual10205 PDF박수희No ratings yet
- Case Study of Haleeb FoodDocument18 pagesCase Study of Haleeb Foodjazi_4u86% (22)
- Chapter 2. COST IDocument8 pagesChapter 2. COST IyebegashetNo ratings yet
- Empowerment Is A Leadership TrickDocument10 pagesEmpowerment Is A Leadership TrickAura Carla TolentinoNo ratings yet
- Questions Answers: Legarda vs. Saleeby: The Real Purpose of The Torrens System Is To Quiet Title To Land To Put A StopDocument19 pagesQuestions Answers: Legarda vs. Saleeby: The Real Purpose of The Torrens System Is To Quiet Title To Land To Put A StopNico RoaNo ratings yet
- W 2HotlineContacts2019 - 0 2 PDFDocument3 pagesW 2HotlineContacts2019 - 0 2 PDFNathan Townsend Levy100% (1)
- Quiz 10Document6 pagesQuiz 10Kath RiveraNo ratings yet
- Ratio - Proportion - PercentDocument31 pagesRatio - Proportion - PercentRiyadh HaiderNo ratings yet
- Lab Manual Ds&BdalDocument100 pagesLab Manual Ds&BdalSEA110 Kshitij BhosaleNo ratings yet
- Logix 5000 CIP Sync ConfigurationDocument180 pagesLogix 5000 CIP Sync Configurationاحتشام چوہدریNo ratings yet
- Trade BW Logistic ExtractionDocument54 pagesTrade BW Logistic Extractionlittlebros100% (1)
- Music Business Chapter 9 Music PublishingDocument27 pagesMusic Business Chapter 9 Music Publishingcmk97No ratings yet
- Maths English Medium 7 To 10Document13 pagesMaths English Medium 7 To 10TNGTASELVASOLAINo ratings yet
- E - Efma Rbi Insp Interval Assess Projector - PP SimtechDocument10 pagesE - Efma Rbi Insp Interval Assess Projector - PP SimtechAbhimanyu SharmaNo ratings yet
- Nato Military Policy On Public AffairsDocument21 pagesNato Military Policy On Public AffairsiX i0No ratings yet
- Cilegon-Order Material Pt. Quantum Radja Perkasa-280823Document1 pageCilegon-Order Material Pt. Quantum Radja Perkasa-280823Ria Maretta DewiNo ratings yet
- Dh76 Auto HemaDocument271 pagesDh76 Auto HemaJoshua NarvaezNo ratings yet
- Lippo Karawaci Review 30 September 2019 FINAL PDFDocument149 pagesLippo Karawaci Review 30 September 2019 FINAL PDFAndy AghastaNo ratings yet
- Report On MinesDocument7 pagesReport On MinesYhaneNo ratings yet
- InstallDocument1 pageInstallVictor ZambranoNo ratings yet
- Effecta WoodyDocument21 pagesEffecta WoodyMR XNo ratings yet
- BSBPMG531 - Assessment Task 2 v2Document26 pagesBSBPMG531 - Assessment Task 2 v2Paulo Dizon100% (2)
- Labview ProgrammingDocument20 pagesLabview ProgrammingJames WoodNo ratings yet