You might also like
- IoT - 22 - REST APIDocument35 pagesIoT - 22 - REST APIadnan AdnanNo ratings yet
- WaterflowDocument234 pagesWaterflowadnan AdnanNo ratings yet
- Amdahl 1967Document2 pagesAmdahl 1967adnan AdnanNo ratings yet
- Developmentof Prepaid Electricity Payment Systemfora University Community Usingthe LUHNAlgorithmDocument10 pagesDevelopmentof Prepaid Electricity Payment Systemfora University Community Usingthe LUHNAlgorithmadnan AdnanNo ratings yet
- MTCNNDocument4 pagesMTCNNadnan AdnanNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mobile@IBM - Getting StartedDocument9 pagesMobile@IBM - Getting Startedjonifow730No ratings yet
- ESP8266 To An ArduinoDocument6 pagesESP8266 To An ArduinoShishir KumarNo ratings yet
- Dpc2535a Error Code ListDocument7 pagesDpc2535a Error Code List黃義翔No ratings yet
- EXP-11 Study of LED Blinking in TMS 320 2812 KitDocument5 pagesEXP-11 Study of LED Blinking in TMS 320 2812 KitParthiban BalaramanNo ratings yet
- Availchk ParsysDocument100 pagesAvailchk ParsysapmountNo ratings yet
- Introduction To ARM Processors: - Amreen Hasheem (1DS16CS015) & Akshaj Jain (1DS16CS013) Iii-ADocument9 pagesIntroduction To ARM Processors: - Amreen Hasheem (1DS16CS015) & Akshaj Jain (1DS16CS013) Iii-ABhargavNo ratings yet
- MPMC Unit 5Document62 pagesMPMC Unit 5ganeshNo ratings yet
- Content Beyond SyllabusDocument3 pagesContent Beyond SyllabusRahul PolNo ratings yet
- Me 3311 - MCPLC Unit Du 1 Study NotesDocument4 pagesMe 3311 - MCPLC Unit Du 1 Study Notessivaeeinfo100% (1)
- Arduino UnoDocument3 pagesArduino Unojonatas priscoNo ratings yet
- Introduction To The Topic: LaptopDocument3 pagesIntroduction To The Topic: LaptopJagrati AgrawalNo ratings yet
- Absen Pengenalan Lingkungan Sekolah (PLS) Sma Kesatuan Tahun Ajaran 2021-2022 (Responses)Document9 pagesAbsen Pengenalan Lingkungan Sekolah (PLS) Sma Kesatuan Tahun Ajaran 2021-2022 (Responses)riaNo ratings yet
- Siwes Report 17Document97 pagesSiwes Report 17Ogbu Nelson EbubechukwuNo ratings yet
- HP Compaq nx7300 Dissassembly Manual PDFDocument9 pagesHP Compaq nx7300 Dissassembly Manual PDFMlungisi MkhizeNo ratings yet
- Tutorial Burn Arduino Bootloader Into An Fresh ATmega2560Document3 pagesTutorial Burn Arduino Bootloader Into An Fresh ATmega2560Gustavo Seben ColleNo ratings yet
- Lecture 18 - RICS and CISC PropertiesDocument8 pagesLecture 18 - RICS and CISC PropertiesPragya SinghNo ratings yet
- Disk No. Label Comments BootDocument1 pageDisk No. Label Comments BootDavid HiddingsNo ratings yet
- 8-Bit Microcontroller With 32K Bytes In-System Programmable FlashDocument8 pages8-Bit Microcontroller With 32K Bytes In-System Programmable FlashSeethamalakshmi SeethaNo ratings yet
- MotherboardDocument4 pagesMotherboardDave SedigoNo ratings yet
- Chap 14Lesson01EmsysNewTesthostsystemDocument16 pagesChap 14Lesson01EmsysNewTesthostsystemanishadandaNo ratings yet
- Debug 1214Document4 pagesDebug 1214Fajrian_Alghiffa_571No ratings yet
- INC000000247733 Laptop FormatDocument1 pageINC000000247733 Laptop FormatRanjeet GuptaNo ratings yet
- MPMC LAB (EE3413) Lesson Plan - II EEEDocument2 pagesMPMC LAB (EE3413) Lesson Plan - II EEEDurairaj M.100% (1)
- Tug As An 01Document3 pagesTug As An 01Hilman AbdullahNo ratings yet
- Linux Class 1Document4 pagesLinux Class 1kusumaNo ratings yet
- RubricDocument2 pagesRubricReynaldo RebodosNo ratings yet
- Java in Mobile ComputingDocument15 pagesJava in Mobile ComputingAnshul MehrotraNo ratings yet
- Leader End of Financial Catalogue Apr-Jun 2020 - LowRez - FinalDocument16 pagesLeader End of Financial Catalogue Apr-Jun 2020 - LowRez - Finaltim chambersNo ratings yet
- Tutorial Upgrade Samsung Galaxy Note Android 4.0Document25 pagesTutorial Upgrade Samsung Galaxy Note Android 4.0Sk Seri MawarNo ratings yet
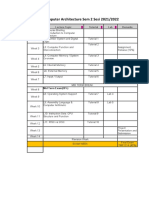
- TMF1214 Computer Architecture Study Plan Sem 2 2022 2023Document2 pagesTMF1214 Computer Architecture Study Plan Sem 2 2022 2023Adry NietzscheNo ratings yet