You might also like
- MATLAB Machine Learning Recipes: A Problem-Solution ApproachFrom EverandMATLAB Machine Learning Recipes: A Problem-Solution ApproachNo ratings yet
- Advanced AutoLISP ProgrammingDocument42 pagesAdvanced AutoLISP Programmingnosena13No ratings yet
- An Ordinance Requiring Couples To Plant Trees As A Requisite For Securing Pre Marriage Counseling CertificateDocument2 pagesAn Ordinance Requiring Couples To Plant Trees As A Requisite For Securing Pre Marriage Counseling Certificate宇宙刑事 シャイダ100% (2)
- Full ProposalDocument11 pagesFull ProposalMohammed A. AbuShanabNo ratings yet
- Beginning MATLAB and Simulink: From Novice to ProfessionalFrom EverandBeginning MATLAB and Simulink: From Novice to ProfessionalNo ratings yet
- Objective & QuestionnaireDocument3 pagesObjective & QuestionnaireRadhika Vijayakumar75% (8)
- L 4 - Currency Forecasting Using Technical Analysis PDFDocument34 pagesL 4 - Currency Forecasting Using Technical Analysis PDFNoris Grigore Vlasie100% (1)
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- TCS1 21Document8 pagesTCS1 21amparoparanoiaNo ratings yet
- Fullprof PsDocument34 pagesFullprof Psgadas11No ratings yet
- Feap ManualDocument45 pagesFeap ManualKamal GuptaNo ratings yet
- FpfitDocument28 pagesFpfitzorrito56No ratings yet
- Group B Assignment No.1Document8 pagesGroup B Assignment No.1Geet_DNo ratings yet
- Fischer C F, Computer Physics Comm, 43 (1987) 355Document11 pagesFischer C F, Computer Physics Comm, 43 (1987) 355Cesar Sanchez FrancoNo ratings yet
- DIY Deep Learning For Vision - A Hands-On Tutorial With CaffeDocument89 pagesDIY Deep Learning For Vision - A Hands-On Tutorial With CaffejlehtoNo ratings yet
- Splines Toolbos Use MatlabDocument110 pagesSplines Toolbos Use MatlabCarlos BurgaNo ratings yet
- LapackeDocument10 pagesLapackeMario ZamoraNo ratings yet
- Readme SnoptDocument3 pagesReadme SnoptKartik DuttaNo ratings yet
- The Alchemy TutorialDocument18 pagesThe Alchemy TutorialdindimieiNo ratings yet
- Parallel Programming: Openmp + FortranDocument46 pagesParallel Programming: Openmp + FortranJunk JettisonNo ratings yet
- FpfitDocument28 pagesFpfitTanaya WahengbamNo ratings yet
- Java SE 7 Features and EnhancementsDocument4 pagesJava SE 7 Features and EnhancementsGowtham NimmanaNo ratings yet
- 1 SelfStudyF95Document50 pages1 SelfStudyF95abhi71127112No ratings yet
- Smith WatermanDocument23 pagesSmith WatermanSurya Padma100% (1)
- Metnum Ex1Document3 pagesMetnum Ex1baig79No ratings yet
- Function Opf MatpowerDocument44 pagesFunction Opf MatpowerMuhammad SulaimanNo ratings yet
- CD MulticoreDocument10 pagesCD Multicorebhalchimtushar0No ratings yet
- A Tutorial: Genome - Based RNA - Seq Analysis Using The TUXEDO Package (Updated: 2014 - 10 - 21)Document17 pagesA Tutorial: Genome - Based RNA - Seq Analysis Using The TUXEDO Package (Updated: 2014 - 10 - 21)Suany Quesada CalderonNo ratings yet
- OpenmpDocument127 pagesOpenmpivofrompisaNo ratings yet
- Laboratory Work Generating A Discrete Random VariableDocument6 pagesLaboratory Work Generating A Discrete Random VariableSufyan NikaninNo ratings yet
- 316588v1 FullDocument12 pages316588v1 FullCarmita YamNo ratings yet
- Arquivo: /Home/Spellsinger/Alephone/Alephone97.Txt Página 1 de 24Document24 pagesArquivo: /Home/Spellsinger/Alephone/Alephone97.Txt Página 1 de 24dont4getNo ratings yet
- Multiwfn Quick StartDocument9 pagesMultiwfn Quick StartrafelNo ratings yet
- Structure Calculations With XplorDocument7 pagesStructure Calculations With XplorShantanu S BhattacharyyaNo ratings yet
- Name Synopsis: Italic TextDocument10 pagesName Synopsis: Italic TextbubbaNo ratings yet
- Thanks For Downloading. Enjoy The ReadingDocument3 pagesThanks For Downloading. Enjoy The Readingbrahmi_xyzNo ratings yet
- HintsDocument4 pagesHintsTimmy NgoNo ratings yet
- Pep 8 PaperDocument5 pagesPep 8 PaperBrent ButlerNo ratings yet
- Mes 13 - 4Document2 pagesMes 13 - 4Ag PatriaNo ratings yet
- JavaFoil Users GuideDocument34 pagesJavaFoil Users GuideStefano CapovillaNo ratings yet
- How To Write An Eclipse DebuggerDocument17 pagesHow To Write An Eclipse DebuggerMce RegNo ratings yet
- Using U BootDocument5 pagesUsing U BootRAMUNo ratings yet
- Alph Smashing SecurityDocument28 pagesAlph Smashing Securityj4sonlyNo ratings yet
- Factors Affecting Performance of ProgramDocument2 pagesFactors Affecting Performance of Programbsgindia82No ratings yet
- A Little Bit of STATA ProgrammingDocument32 pagesA Little Bit of STATA ProgrammingYuriy PodvysotskiyNo ratings yet
- FEAP - A Finite Element Analysis Program: Version 8.3 Example ManualDocument58 pagesFEAP - A Finite Element Analysis Program: Version 8.3 Example ManualBrandon BuchnaNo ratings yet
- Exploiting Loop-Level Parallelism For Simd Arrays Using: OpenmpDocument12 pagesExploiting Loop-Level Parallelism For Simd Arrays Using: OpenmpSpin FotonioNo ratings yet
- Ayuda AmplDocument11 pagesAyuda AmplpegoroNo ratings yet
- Oracle12c Understanding VersioningDocument2 pagesOracle12c Understanding VersioningAmit SharmaNo ratings yet
- FAQ's Week-2-1Document10 pagesFAQ's Week-2-1CharuNo ratings yet
- Espresso Logic Minimizer ManualDocument3 pagesEspresso Logic Minimizer ManualDan Mihai DumitrescuNo ratings yet
- Programming Manual Feap 84 Ch1Document4 pagesProgramming Manual Feap 84 Ch1Uci Njemacki100% (1)
- Full Download Solution Manual For Computer Organization Architecture Themes and Variations 1st Edition PDF Full ChapterDocument36 pagesFull Download Solution Manual For Computer Organization Architecture Themes and Variations 1st Edition PDF Full Chapterpoke.sonorous6ye03100% (23)
- Smash The StackDocument29 pagesSmash The Stackwp1baraba100% (1)
- Tutorial RNA-Seq Analysis Part 1Document8 pagesTutorial RNA-Seq Analysis Part 1Lee LI PINNo ratings yet
- HW4Document10 pagesHW4Jonathan OswaldNo ratings yet
- Unit 12 (Program Units 1)Document39 pagesUnit 12 (Program Units 1)Rajesh KumarNo ratings yet
- R Lab 3Document7 pagesR Lab 3sdcphdworkNo ratings yet
- Modern Stack SmashingDocument9 pagesModern Stack Smashinghacktivists2011No ratings yet
- Soto FerrariDocument9 pagesSoto Ferrarifawzi5111963_7872830No ratings yet
- LEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingFrom EverandLEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingNo ratings yet
- MGT 616Document3 pagesMGT 616rizwan aliNo ratings yet
- Apuntador Logitech R400Document2 pagesApuntador Logitech R400Ivonne SantiagoNo ratings yet
- Clique PensDocument6 pagesClique PensNEERAJNo ratings yet
- Mathematics and Computer Science Division Argonne National LaboratoryDocument19 pagesMathematics and Computer Science Division Argonne National LaboratoryRaviteja MeesalaNo ratings yet
- MSIPHA V Ndlovu CaselawDocument4 pagesMSIPHA V Ndlovu CaselawDoreen AaronNo ratings yet
- Sampling of Geosynthetics For TestingDocument3 pagesSampling of Geosynthetics For TestingEdmundo Jaita CuellarNo ratings yet
- Manual Robots CP en 01 2021Document42 pagesManual Robots CP en 01 2021asrulnizam matnor100% (1)
- ProgramDocument8 pagesProgramMichille Piquero DE LeonNo ratings yet
- Case Study On Fair Trade: Submitted To Dr. Nilanjan SenguptaDocument7 pagesCase Study On Fair Trade: Submitted To Dr. Nilanjan SenguptadacchuNo ratings yet
- Ir Obstacle Detection To Actuate LoadDocument17 pagesIr Obstacle Detection To Actuate LoadGabi CiobanuNo ratings yet
- Synthesis Land Titles and DeedsDocument5 pagesSynthesis Land Titles and DeedsAnonymous zDh9ksnNo ratings yet
- Free DSPDocument25 pagesFree DSPDiY-tech MalangNo ratings yet
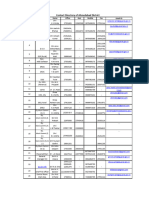
- All Department Telephone DirectoryDocument10 pagesAll Department Telephone DirectoryDhawal SolankiNo ratings yet
- Accomplishment Report: Annex 3Document41 pagesAccomplishment Report: Annex 3Julius BayagaNo ratings yet
- JOb Attitudes-Employee Turnover-Best Literature ReviewDocument19 pagesJOb Attitudes-Employee Turnover-Best Literature ReviewNalin AhangamaNo ratings yet
- LM317Document12 pagesLM317Martin CraysNo ratings yet
- Case Locator ManupatraDocument8 pagesCase Locator Manupatrastud_69No ratings yet
- ResearchDocument10 pagesResearchElijah ColicoNo ratings yet
- ANSYS - Getting Started Tutorial - WorkbenchDocument20 pagesANSYS - Getting Started Tutorial - WorkbenchPrabakaran ThambusamyNo ratings yet
- Descargar Manual de Draftsight en EspanolDocument3 pagesDescargar Manual de Draftsight en EspanolOrion EspNo ratings yet
- Fundamentals of The C Programming LanguageDocument23 pagesFundamentals of The C Programming Languageakbisoi1No ratings yet
- Alcatel-Lucent OMSN Product Family Optical Multi-Service NodeDocument12 pagesAlcatel-Lucent OMSN Product Family Optical Multi-Service NodeMostifa MastafaNo ratings yet
- 1.3.2 Windows Server 2016 User Interface FactsDocument3 pages1.3.2 Windows Server 2016 User Interface FactsfionaNo ratings yet
- Pocket Book 301Document60 pagesPocket Book 301Raga BhavaNo ratings yet
- Robots TeleoperadosDocument7 pagesRobots TeleoperadosDanilo Carvajal MarinNo ratings yet
- Nestle Case Study AccountingDocument10 pagesNestle Case Study AccountingAbeyjjNo ratings yet