0% found this document useful (0 votes)
16K views3 pagesRace Condition
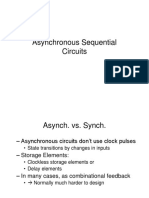
1) The document discusses asynchronous sequential circuits and topics related to them including metastability, race conditions, synchronizers, and examples from Moore and Mealy machines.
2) Metastability occurs when there are setup and hold time violations in a flip-flop, causing its output to enter an unpredictable quasi-stable state before settling to 1 or 0.
3) Race conditions exist when two or more state variables change in response to an input, and a critical race can determine the final state while a non-critical race does not impact it.
Uploaded by
D StudiosCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
16K views3 pagesRace Condition
1) The document discusses asynchronous sequential circuits and topics related to them including metastability, race conditions, synchronizers, and examples from Moore and Mealy machines.
2) Metastability occurs when there are setup and hold time violations in a flip-flop, causing its output to enter an unpredictable quasi-stable state before settling to 1 or 0.
3) Race conditions exist when two or more state variables change in response to an input, and a critical race can determine the final state while a non-critical race does not impact it.
Uploaded by
D StudiosCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd