You might also like
- Exact Approach To The Electric Bus Fleet Scheduling Exact Approach To The Electric Bus Fleet SchedulingDocument8 pagesExact Approach To The Electric Bus Fleet Scheduling Exact Approach To The Electric Bus Fleet SchedulingShubham SrivastavaNo ratings yet
- Unifiable Multi Commodity Kinematic Wave ModelDocument20 pagesUnifiable Multi Commodity Kinematic Wave ModelMaruf MuhammadNo ratings yet
- EditorialDocument4 pagesEditorialFirdaus SukkiNo ratings yet
- Campisi 2020Document8 pagesCampisi 2020Sebastian LopezNo ratings yet
- 1 s2.0 S2352146519303151 MainDocument6 pages1 s2.0 S2352146519303151 MainmavromouNo ratings yet
- Passenger Safety in Ride-Sharing Services Passenger Safety in Ride-Sharing ServicesDocument7 pagesPassenger Safety in Ride-Sharing Services Passenger Safety in Ride-Sharing ServicesSaha RenoNo ratings yet
- Impact of Digital Technologies On Labor Market and The Transport Sector Impact of Digital Technologies On Labor Market and The Transport SectorDocument8 pagesImpact of Digital Technologies On Labor Market and The Transport Sector Impact of Digital Technologies On Labor Market and The Transport SectorPhúc Vũ KiếnNo ratings yet
- 1 s2.0 S1877050920306177 MainDocument7 pages1 s2.0 S1877050920306177 MainJanviNo ratings yet
- Alternative Taxi Services and Their Cost AnalysisDocument8 pagesAlternative Taxi Services and Their Cost Analysiscabmeuk07No ratings yet
- Artigooptimal Placement of Charging Stations For Electric Vehicles IDocument8 pagesArtigooptimal Placement of Charging Stations For Electric Vehicles IJoão PintoNo ratings yet
- Customer Requirements For Urban Public Transport Mobile Application Customer Requirements For Urban Public Transport Mobile ApplicationDocument8 pagesCustomer Requirements For Urban Public Transport Mobile Application Customer Requirements For Urban Public Transport Mobile ApplicationAhmad Reshad AnsarNo ratings yet
- No 5Document8 pagesNo 5Tahu BulatNo ratings yet
- A Green Logistics Solution For Last-Mile Deliveries Considering E-Vans and E-Cargo BikesDocument9 pagesA Green Logistics Solution For Last-Mile Deliveries Considering E-Vans and E-Cargo BikesGiovanni GadaletaNo ratings yet
- Energy Consumption of An Electric and An Internal CombustionDocument8 pagesEnergy Consumption of An Electric and An Internal Combustionrosca raulNo ratings yet
- 2017 - Preliminary Weight Sizing of Light Pure-Electric and Hybrid-Electric AircraftDocument14 pages2017 - Preliminary Weight Sizing of Light Pure-Electric and Hybrid-Electric Aircraftahmad.yasser123456No ratings yet
- 10 1016@j Eswa 2014 01 005 PDFDocument14 pages10 1016@j Eswa 2014 01 005 PDFhina firdousNo ratings yet
- ChandanDocument17 pagesChandanDung NguyenNo ratings yet
- 1 s2.0 S2352146521009595 Main PDFDocument8 pages1 s2.0 S2352146521009595 Main PDFSimran SrgcNo ratings yet
- Digital Twins in The Intelligent Transport Systems Digital Twins in The Intelligent Transport SystemsDocument9 pagesDigital Twins in The Intelligent Transport Systems Digital Twins in The Intelligent Transport Systemsfamily rawtherNo ratings yet
- Road Traffic Congestion Detection in VANET Networks Road Traffic Congestion Detection in VANET NetworksDocument6 pagesRoad Traffic Congestion Detection in VANET Networks Road Traffic Congestion Detection in VANET NetworksElda StefaNo ratings yet
- Road User Effects Related To Pavement Degradation Based On The HDM Tools (Mikolaj, 2019)Document9 pagesRoad User Effects Related To Pavement Degradation Based On The HDM Tools (Mikolaj, 2019)Mario SolanoNo ratings yet
- EVRPTWDocument22 pagesEVRPTWascgcggNo ratings yet
- A System Dynamic Model For CO2 Emission Mitigation Policy Design in Road Transport SectorDocument9 pagesA System Dynamic Model For CO2 Emission Mitigation Policy Design in Road Transport SectorwangintanNo ratings yet
- Wandel Et All TRA ID 0852 Lisbon 2022-07-28 FinalDocument8 pagesWandel Et All TRA ID 0852 Lisbon 2022-07-28 FinalSten WandelNo ratings yet
- A Mission Coordinator Approach For A Fleet of UA 2018 Transportation ResearcDocument10 pagesA Mission Coordinator Approach For A Fleet of UA 2018 Transportation ResearcMuh hasan FaharuddinNo ratings yet
- Application of Artificial Intelligence in Traffic ControlSystem of Non-Autonomous Vehicles at Signalized Road Intersection.Document7 pagesApplication of Artificial Intelligence in Traffic ControlSystem of Non-Autonomous Vehicles at Signalized Road Intersection.hesam khorramiNo ratings yet
- A Framework For Electric Vehicle (EV) Charging in SingaporeDocument6 pagesA Framework For Electric Vehicle (EV) Charging in SingaporeIsrael JosueNo ratings yet
- Benbou Barro ArrisDocument10 pagesBenbou Barro Arrissamiha.aksasNo ratings yet
- J.04 2013 1370505806404Document9 pagesJ.04 2013 1370505806404Liviu SavciucNo ratings yet
- 1 s2.0 S1877042811014182 MainDocument12 pages1 s2.0 S1877042811014182 MainShoumik Deb NathNo ratings yet
- Optimisation in Transport and Logistic ProcessesDocument8 pagesOptimisation in Transport and Logistic Processeshamza elgarragNo ratings yet
- Transportation Research Part D: Ioannis Kougias, Alexandros Nikitas, Christian Thiel, Sándor Szabó TDocument16 pagesTransportation Research Part D: Ioannis Kougias, Alexandros Nikitas, Christian Thiel, Sándor Szabó TSumit TomarNo ratings yet
- 1 s2.0 S2352146519301462 MainDocument11 pages1 s2.0 S2352146519301462 MainXiomhara CóndorNo ratings yet
- Sciencedirect SciencedirectDocument8 pagesSciencedirect SciencedirectMali VelikiNo ratings yet
- Analysis and Comparison of Resonance Topologies in 6 6kW in 2019 Procedia MaDocument8 pagesAnalysis and Comparison of Resonance Topologies in 6 6kW in 2019 Procedia MaHaider SultanNo ratings yet
- Sciencedirect Sciencedirect SciencedirectDocument6 pagesSciencedirect Sciencedirect SciencedirectGlory Gold GospelNo ratings yet
- Electric and Autonomous Vehicles in Transportation CASE STUDYDocument12 pagesElectric and Autonomous Vehicles in Transportation CASE STUDYkaramjot kaurNo ratings yet
- 1 s2.0 S0959652623024125 MainDocument12 pages1 s2.0 S0959652623024125 MainAli AhmedNo ratings yet
- FDP Brochure EE DEIDocument6 pagesFDP Brochure EE DEINikita SaxenaNo ratings yet
- Transportation Research Interdisciplinary Perspectives: Monica Maduekwe, Uduak Akpan, Salisu IsihakDocument9 pagesTransportation Research Interdisciplinary Perspectives: Monica Maduekwe, Uduak Akpan, Salisu IsihakTimileyin AkintiloNo ratings yet
- Analysis and Two Dimensional Modeling of Directional Coup 2019 Procedia ManuDocument8 pagesAnalysis and Two Dimensional Modeling of Directional Coup 2019 Procedia ManuHaider SultanNo ratings yet
- Helors 2013Document9 pagesHelors 2013Ayushi ShahNo ratings yet
- Ecmar Brochure Maritme Technology Challenges 2030Document12 pagesEcmar Brochure Maritme Technology Challenges 2030Maciej Reichel0% (1)
- Machine Learning Approaches in Smart HealthDocument8 pagesMachine Learning Approaches in Smart HealthMaheshkumar AmulaNo ratings yet
- 1 s2.0 S235214652100123X MainDocument8 pages1 s2.0 S235214652100123X MainIUST TRLNo ratings yet
- UNT Research Magazine 2020Document48 pagesUNT Research Magazine 2020Alo RioNo ratings yet
- A Comparison of Deep Learning Methods For Urban Traffic Forecasting Using Floating Car DataDocument8 pagesA Comparison of Deep Learning Methods For Urban Traffic Forecasting Using Floating Car DataAlejandroAragonNo ratings yet
- How Do Autonomous Cars Work? How Do Autonomous Cars Work?: SciencedirectDocument8 pagesHow Do Autonomous Cars Work? How Do Autonomous Cars Work?: SciencedirectDiego Franco Julcamoro VergaraNo ratings yet
- Aveta 2020Document8 pagesAveta 2020Aanggi JiihanNo ratings yet
- Pathways To E-Mobility Transition in UgandaDocument10 pagesPathways To E-Mobility Transition in UgandaWamboga OkothNo ratings yet
- Autonomous Vehicles: Challenges, Opportunities and Future Implications For Transportation PoliciesDocument21 pagesAutonomous Vehicles: Challenges, Opportunities and Future Implications For Transportation PoliciesSuguna SuhashiniNo ratings yet
- 1 s2.0 S1876610218311937 MainDocument8 pages1 s2.0 S1876610218311937 Maintenpolton jaimeNo ratings yet
- Airline Within Airline Business Model and Strategy - 2021 - Transportation ReseaDocument14 pagesAirline Within Airline Business Model and Strategy - 2021 - Transportation ReseaHananNo ratings yet
- 1 s2.0 S2352146519302790 MainDocument7 pages1 s2.0 S2352146519302790 MainAmir BakhshiyanNo ratings yet
- 2017 Energyprocedia HybridaircraftDocument9 pages2017 Energyprocedia HybridaircraftFelipeZapanaFloresNo ratings yet
- 3 RadDocument8 pages3 RadSanja ŠurdonjaNo ratings yet
- Introducing The Organization of Transport Studies: VTT Technical Research Centre of FinlandDocument4 pagesIntroducing The Organization of Transport Studies: VTT Technical Research Centre of FinlandApri AndiNo ratings yet
- Sciencedirect: Katarzyna Szymczyk, Marta Kadłubek Katarzyna Szymczyk, Marta KadłubekDocument9 pagesSciencedirect: Katarzyna Szymczyk, Marta Kadłubek Katarzyna Szymczyk, Marta KadłubekSevilNo ratings yet
- Bereta-2018-From Copernicus Big Data To Big inDocument4 pagesBereta-2018-From Copernicus Big Data To Big inArmando Rafael Fonseca ZuritaNo ratings yet
- Wireless Power Transfer for E-Mobility: Fundamentals and Design Guidelines for Wireless Charging of Electric VehiclesFrom EverandWireless Power Transfer for E-Mobility: Fundamentals and Design Guidelines for Wireless Charging of Electric VehiclesNo ratings yet
- Performance Evaluation of Tabu Search Method and Adaptive Large Neighborhood Search Method in The Electric Vehicle Routing Problems With Time WindowsDocument4 pagesPerformance Evaluation of Tabu Search Method and Adaptive Large Neighborhood Search Method in The Electric Vehicle Routing Problems With Time WindowsIndahNo ratings yet
- Integer Linear Programming: Penelitian Operasional IDocument8 pagesInteger Linear Programming: Penelitian Operasional IIndahNo ratings yet
- MCFDocument28 pagesMCFIndahNo ratings yet
- Journal of Mathematical Analysis and Applications: Loïc BourdinDocument12 pagesJournal of Mathematical Analysis and Applications: Loïc BourdinIndahNo ratings yet
- CMMI Development V2 0 Brochure PDFDocument7 pagesCMMI Development V2 0 Brochure PDFYadira VargasNo ratings yet
- Dynamics of Rigid Bodies PDFDocument138 pagesDynamics of Rigid Bodies PDFGrachelle Ann PabloNo ratings yet
- Road Check List Borrow ExcavationDocument2 pagesRoad Check List Borrow Excavationklp_kedarpNo ratings yet
- Simple and Multiple Regression Models For Relationship Between Electrical Resistivity and Various Soil Properties For Soil Characterization PDFDocument10 pagesSimple and Multiple Regression Models For Relationship Between Electrical Resistivity and Various Soil Properties For Soil Characterization PDFPato MeraNo ratings yet
- Electric CircuitsDocument7 pagesElectric CircuitsEzio AuditoreNo ratings yet
- Science 7Document4 pagesScience 7April Rose Alforque MagbanuaNo ratings yet
- Sponge ColoringDocument3 pagesSponge ColoringMavel Madih KumchuNo ratings yet
- FINA 4250 Applications of Risk ModelsDocument67 pagesFINA 4250 Applications of Risk ModelsChristopherNo ratings yet
- Jack Frost PDF v2Document94 pagesJack Frost PDF v2Erick Adams100% (4)
- SN 74 Ls 245Document19 pagesSN 74 Ls 245Luisdceo LggNo ratings yet
- Lecture 8 Data Sources in GISDocument32 pagesLecture 8 Data Sources in GISkhakhamasetiNo ratings yet
- Rational Equations 200516061645Document12 pagesRational Equations 200516061645Shikha AgrawalNo ratings yet
- Unit Plan Template: Teacher Subject/Class/Course Unit Title Grade Level Duration: 10 Days Date/s: November 17Document5 pagesUnit Plan Template: Teacher Subject/Class/Course Unit Title Grade Level Duration: 10 Days Date/s: November 17api-546896006No ratings yet
- Bonding Process PDFDocument29 pagesBonding Process PDFglezglez1No ratings yet
- Defrino SummaryDocument1 pageDefrino SummaryAlma JavierNo ratings yet
- Daylight Factor - Wikipedia, The Free EncyclopediaDocument2 pagesDaylight Factor - Wikipedia, The Free EncyclopediadasaNo ratings yet
- Reconfigurable Diffractive Antenna Based On Switchable Electrically Induced TransparencyDocument12 pagesReconfigurable Diffractive Antenna Based On Switchable Electrically Induced TransparencyAnuj SharmaNo ratings yet
- Zamak-3 XometryDocument1 pageZamak-3 XometryFrancisco BocanegraNo ratings yet
- Sustainable Landscape in University Campus Urban Design Total PDFDocument345 pagesSustainable Landscape in University Campus Urban Design Total PDFGarima Agarwal100% (1)
- Friis Transmission EquationDocument9 pagesFriis Transmission Equationindu budamaguntaNo ratings yet
- MODULE 2 The Nature of The Human PersonDocument8 pagesMODULE 2 The Nature of The Human PersonMary Grace Lobina ColamboNo ratings yet
- Tinnitus Assessment Thi ScoringDocument4 pagesTinnitus Assessment Thi ScoringbssNo ratings yet
- Curriculum Vitae: Maria BeihaghiDocument19 pagesCurriculum Vitae: Maria BeihaghiSamuel Embiza TadesseNo ratings yet
- Manager Feedback Survey-GoogleDocument3 pagesManager Feedback Survey-GoogleJorge Pinho da CruzNo ratings yet
- Lines of Latitude and Longitude WorksheetDocument9 pagesLines of Latitude and Longitude Worksheetrenegade 1No ratings yet
- Aldous Huxley Between The Wars - Essays and Letters. - Free Online LibraryDocument4 pagesAldous Huxley Between The Wars - Essays and Letters. - Free Online LibraryHasan ArslanNo ratings yet
- Act Action Active Actively: Professional English Ii Unit IiDocument3 pagesAct Action Active Actively: Professional English Ii Unit IiCamila Ruiz GasparNo ratings yet
- Dangarembga The Popular ArtsDocument20 pagesDangarembga The Popular ArtsMihail EryvanNo ratings yet
- Survey Module 1 Introduction To Surveying Im-FormatDocument10 pagesSurvey Module 1 Introduction To Surveying Im-FormatJastine FG dela CruzNo ratings yet
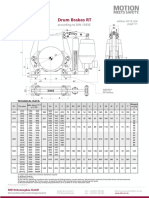
- Drum Brakes RT: According To DIN 15435Document1 pageDrum Brakes RT: According To DIN 15435LukaNo ratings yet