You might also like
- 1 s2.0 S1877050920304154 MainDocument9 pages1 s2.0 S1877050920304154 MainKhairul AfhamNo ratings yet
- Prediction of Traffic Conflicts at Signalized Intersections UsingDocument8 pagesPrediction of Traffic Conflicts at Signalized Intersections Usingmahendra.ramandaNo ratings yet
- 1 s2.0 S235214652100123X MainDocument8 pages1 s2.0 S235214652100123X MainIUST TRLNo ratings yet
- Road User Effects Related To Pavement Degradation Based On The HDM Tools (Mikolaj, 2019)Document9 pagesRoad User Effects Related To Pavement Degradation Based On The HDM Tools (Mikolaj, 2019)Mario SolanoNo ratings yet
- Exact Approach To The Electric Bus Fleet Scheduling Exact Approach To The Electric Bus Fleet SchedulingDocument8 pagesExact Approach To The Electric Bus Fleet Scheduling Exact Approach To The Electric Bus Fleet SchedulingShubham SrivastavaNo ratings yet
- ChandanDocument17 pagesChandanDung NguyenNo ratings yet
- Jurnal 7 (Internasional)Document9 pagesJurnal 7 (Internasional)Kayla Dwi AnindyaNo ratings yet
- Combine PDFDocument205 pagesCombine PDFKayla Dwi AnindyaNo ratings yet
- Benefit of The Instrumentation, Monitoring and Control System (IMC) of Bridges in Colombia From An Economic Point of View Through A Case StudyDocument11 pagesBenefit of The Instrumentation, Monitoring and Control System (IMC) of Bridges in Colombia From An Economic Point of View Through A Case Studyihsan tamrinNo ratings yet
- 1 s2.0 S2352146523012279 MainDocument8 pages1 s2.0 S2352146523012279 MainMaria JaramilloNo ratings yet
- Level of Service ConeptDocument5 pagesLevel of Service ConeptArch K3NNo ratings yet
- 1 s2.0 S1877050921025230 MainDocument6 pages1 s2.0 S1877050921025230 MainmohammadNo ratings yet
- Do Vehicles Sense, Detect and Locate Speed Bumps? Do Vehicles Sense, Detect and Locate Speed Bumps?Document8 pagesDo Vehicles Sense, Detect and Locate Speed Bumps? Do Vehicles Sense, Detect and Locate Speed Bumps?Chinmaya naikNo ratings yet
- Friedrich PC MacroDocument16 pagesFriedrich PC MacroabkhaledNo ratings yet
- 1 s2.0 S0263224120305868 MainDocument14 pages1 s2.0 S0263224120305868 MainKhairul AfhamNo ratings yet
- T A N A: Opics in Utomotive Etworking and PplicationsDocument2 pagesT A N A: Opics in Utomotive Etworking and PplicationsKarniNo ratings yet
- 1 s2.0 S2352146520305202 MainDocument10 pages1 s2.0 S2352146520305202 MainBrayan VelozaNo ratings yet
- Статья 6Document6 pagesСтатья 6dimas.poloshkovNo ratings yet
- DDDDDocument8 pagesDDDDAnonymous BQkJ77GKNo ratings yet
- Articulo 1Document21 pagesArticulo 1Roberto Melendez CastilloNo ratings yet
- 1 s2.0 S2352146521007389 MainDocument9 pages1 s2.0 S2352146521007389 Mainarega amareNo ratings yet
- Asjc 2567Document18 pagesAsjc 2567celankanNo ratings yet
- Passenger Safety in Ride-Sharing Services Passenger Safety in Ride-Sharing ServicesDocument7 pagesPassenger Safety in Ride-Sharing Services Passenger Safety in Ride-Sharing ServicesSaha RenoNo ratings yet
- VEMON Vision Based Vehicle Counter For Traffic MonitoringDocument7 pagesVEMON Vision Based Vehicle Counter For Traffic MonitoringWelleah Mae T. LacsonNo ratings yet
- A New Damage Indicator Based On Homogeneity and Wireless - 2023 - Developments IDocument11 pagesA New Damage Indicator Based On Homogeneity and Wireless - 2023 - Developments IHany RagabNo ratings yet
- Multivariate Analysis For The Creation of Port Community SystemDocument10 pagesMultivariate Analysis For The Creation of Port Community SystemHarjot singh pooniNo ratings yet
- 2017 - Preliminary Weight Sizing of Light Pure-Electric and Hybrid-Electric AircraftDocument14 pages2017 - Preliminary Weight Sizing of Light Pure-Electric and Hybrid-Electric Aircraftahmad.yasser123456No ratings yet
- Fuzzy Diagnostic System For Railway BridgesDocument6 pagesFuzzy Diagnostic System For Railway BridgesMahmoud SamiNo ratings yet
- Development of Traffic Safety Evaluation Method Based On Simulated Conflicts at Signalized IntersectionsDocument5 pagesDevelopment of Traffic Safety Evaluation Method Based On Simulated Conflicts at Signalized IntersectionsCristian NaizaqueNo ratings yet
- An Innovative Methodology For Micro-Mobility Network Planning An Innovative Methodology For Micro-Mobility Network PlanningDocument8 pagesAn Innovative Methodology For Micro-Mobility Network Planning An Innovative Methodology For Micro-Mobility Network PlanningSaputraNo ratings yet
- Vehicular Communications: Survey and Challenges of Channel and Propagation ModelsDocument10 pagesVehicular Communications: Survey and Challenges of Channel and Propagation ModelsFarouk BoumehrezNo ratings yet
- 1 s2.0 S2352146519303382 MainDocument7 pages1 s2.0 S2352146519303382 MainLeonNo ratings yet
- Computer Communications: Pablo Barbecho Bautista, Luis Urquiza Aguiar, Mónica Aguilar IgartuaDocument13 pagesComputer Communications: Pablo Barbecho Bautista, Luis Urquiza Aguiar, Mónica Aguilar IgartuaAlbanianLearning CenterNo ratings yet
- Conference PaperDocument4 pagesConference PaperHelenaNo ratings yet
- Digital Twins in The Intelligent Transport Systems Digital Twins in The Intelligent Transport SystemsDocument9 pagesDigital Twins in The Intelligent Transport Systems Digital Twins in The Intelligent Transport Systemsfamily rawtherNo ratings yet
- Application of Improved BM Algorithm in String Appr 2020 Procedia Computer SDocument6 pagesApplication of Improved BM Algorithm in String Appr 2020 Procedia Computer SNikita PokharkarNo ratings yet
- 1 s2.0 S2352146519302649 MainDocument8 pages1 s2.0 S2352146519302649 MainJoseph StalinNo ratings yet
- (Pibic1) Assessing Urban Transportation Systems Resilience A Proposal of IndicatorsDocument8 pages(Pibic1) Assessing Urban Transportation Systems Resilience A Proposal of IndicatorsGabriel Almeida AmaralNo ratings yet
- Transportation Security Through Inter Vehicular Ad-Hoc Networks (Vanets) Handovers Using RF Trans ReceiverDocument6 pagesTransportation Security Through Inter Vehicular Ad-Hoc Networks (Vanets) Handovers Using RF Trans ReceivermfhfhfNo ratings yet
- Impact of Cyber-AttacksDocument12 pagesImpact of Cyber-Attacksrajvi yadavNo ratings yet
- No 5Document8 pagesNo 5Tahu BulatNo ratings yet
- Sensors 20 03460 v3 PDFDocument29 pagesSensors 20 03460 v3 PDFAdrianNo ratings yet
- A New Analytical Reliability Assessment Framework For Cognitive Radio Vehicle-to-Vehicle CommunicationsDocument15 pagesA New Analytical Reliability Assessment Framework For Cognitive Radio Vehicle-to-Vehicle CommunicationsNaser MovahhediniaNo ratings yet
- JOURNAL - 2020 - A Multispectral Feature Fusion Network For Robust Pedestrian DetectionDocument13 pagesJOURNAL - 2020 - A Multispectral Feature Fusion Network For Robust Pedestrian DetectionMonica Garcia AiquipaNo ratings yet
- 1 - MSC Thesis Proposal 2020-Ms-Rle-104 Kashif Ali 3Document10 pages1 - MSC Thesis Proposal 2020-Ms-Rle-104 Kashif Ali 3Ibrahim BajwaNo ratings yet
- Development of A Brake by Wire System Design For CDocument18 pagesDevelopment of A Brake by Wire System Design For CMatataw DeditorNo ratings yet
- A Survey On Security Attacks and Defense Techniques For Connected and Autonomous VehiclesDocument29 pagesA Survey On Security Attacks and Defense Techniques For Connected and Autonomous VehiclesWhÉæri WaMaaNo ratings yet
- BischoffDocument7 pagesBischoffKerimcanNo ratings yet
- Campisi 2020Document8 pagesCampisi 2020Sebastian LopezNo ratings yet
- Cooperative Vehicular Networking: A Survey: Ejaz Ahmed, Member, IEEE, and Hamid Gharavi, Life Fellow, IEEEDocument19 pagesCooperative Vehicular Networking: A Survey: Ejaz Ahmed, Member, IEEE, and Hamid Gharavi, Life Fellow, IEEEjulsNo ratings yet
- Global Sensitivity Analysis For The Evaluation of The Effects of Uncertainty of Transport Demand and Passenger Behavior On Planning Railway Services With Variable Train CompositionDocument8 pagesGlobal Sensitivity Analysis For The Evaluation of The Effects of Uncertainty of Transport Demand and Passenger Behavior On Planning Railway Services With Variable Train Compositiongetachew-hagos.geletaNo ratings yet
- Traffic Safety System Management Traffic Safety System Management Traffic Safety System Management Traffic Safety System ManagementDocument6 pagesTraffic Safety System Management Traffic Safety System Management Traffic Safety System Management Traffic Safety System ManagementFaruq AlfarobiNo ratings yet
- 1 s2.0 S235214651930242X MainDocument8 pages1 s2.0 S235214651930242X MainAndre Novent ChenadyNo ratings yet
- Sensors: Comparison of Filtering Methods For Enhanced Reliability of A Train Axle Counter SystemDocument18 pagesSensors: Comparison of Filtering Methods For Enhanced Reliability of A Train Axle Counter SystemDeni Agustina JNo ratings yet
- Accident Analysis and Prevention: SciencedirectDocument11 pagesAccident Analysis and Prevention: Sciencedirectnikky72No ratings yet
- 1 s2.0 S2352146521009662 MainDocument8 pages1 s2.0 S2352146521009662 Mainjames danicaNo ratings yet
- Study of Wheel-Rail Adhesion During Braking Maneuvers Study of Wheel-Rail Adhesion During Braking ManeuversDocument12 pagesStudy of Wheel-Rail Adhesion During Braking Maneuvers Study of Wheel-Rail Adhesion During Braking ManeuversME5 6097 RITIKNo ratings yet
- Ghadi2020 Article ANewMethodologyForAnalyzingVehDocument12 pagesGhadi2020 Article ANewMethodologyForAnalyzingVehSali ÁdámNo ratings yet
- Deep Learning Frameworks For Pavement Distress Classification: A Comparative AnalysisDocument7 pagesDeep Learning Frameworks For Pavement Distress Classification: A Comparative AnalysisSavina ZahroNo ratings yet
- ASME RAM 1 2013 Reliability, AvailabilityDocument24 pagesASME RAM 1 2013 Reliability, AvailabilityAmir BakhshiyanNo ratings yet
- Bds en 13260 2010Document41 pagesBds en 13260 2010Amir BakhshiyanNo ratings yet
- HRN en Iso 5817 - 2007Document40 pagesHRN en Iso 5817 - 2007Amir BakhshiyanNo ratings yet
- Digital Safety in Railway Transport - Aspects of Management and TechnologyDocument153 pagesDigital Safety in Railway Transport - Aspects of Management and TechnologyAmir BakhshiyanNo ratings yet
- Astm D5907 13Document4 pagesAstm D5907 13Amir BakhshiyanNo ratings yet
- Cutting and Packing in Production and DistributionDocument255 pagesCutting and Packing in Production and DistributionAmir BakhshiyanNo ratings yet
- Saint-Gobain Sekurit Automotive Glazing Production ProcessesDocument1 pageSaint-Gobain Sekurit Automotive Glazing Production ProcessesAmir BakhshiyanNo ratings yet
- 8-Maintenance Handbook On Digital Axle Counter (Multi Section) PDFDocument66 pages8-Maintenance Handbook On Digital Axle Counter (Multi Section) PDFRohit Kumar100% (1)
- Daily Habits Itinerary To Singapore: Trip Notes Traveler NamesDocument1 pageDaily Habits Itinerary To Singapore: Trip Notes Traveler NamesRizky Hardiana de Toulouse-LautrecNo ratings yet
- SM#62 October 13, 2016Document12 pagesSM#62 October 13, 2016kwameNo ratings yet
- BS - Part B - 1Document98 pagesBS - Part B - 1dharshini deivasigamaniNo ratings yet
- Transportation of Research Are We Making The DifferenceDocument19 pagesTransportation of Research Are We Making The DifferenceSyǝd KhairiNo ratings yet
- Glenn Ride ScheduleDocument1 pageGlenn Ride SchedulejdmuddybikesNo ratings yet
- Air: 2490 Rail: 914 Hostel: 1080 Total: 4484 2242 Per Person Dates: June 30 - July 21 Duration: 22 Days Fat Tire Day Tour - 26 PPDocument39 pagesAir: 2490 Rail: 914 Hostel: 1080 Total: 4484 2242 Per Person Dates: June 30 - July 21 Duration: 22 Days Fat Tire Day Tour - 26 PPBrady ShipletNo ratings yet
- E.6,7 & 8 - EOT Cranes 50, 20 & 10 TDocument33 pagesE.6,7 & 8 - EOT Cranes 50, 20 & 10 TAvijitNo ratings yet
- Transportation Engg-I NOTESDocument135 pagesTransportation Engg-I NOTESPrasad NbNo ratings yet
- Coupler and Draw Gear: Rolling Stock StandardDocument51 pagesCoupler and Draw Gear: Rolling Stock StandarddisyelNo ratings yet
- Metro Line 5 (Thane-Bhiwandi-Kalyan)Document285 pagesMetro Line 5 (Thane-Bhiwandi-Kalyan)Faihzan F Ahmad ShaikhNo ratings yet
- Diesel EngineDocument29 pagesDiesel EngineRavi KumarNo ratings yet
- Bangladesh Railway e TicketDocument1 pageBangladesh Railway e Ticket01911514616No ratings yet
- Nikko RoutemapDocument1 pageNikko RoutemapSonia A SNo ratings yet
- Broschuere Zahlen Und Fakten 2012 enDocument32 pagesBroschuere Zahlen Und Fakten 2012 engenesispradooNo ratings yet
- Bridges, EnglishDocument4 pagesBridges, EnglishSyaiful Arif WicaksonoNo ratings yet
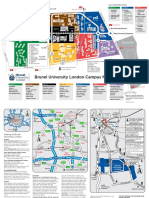
- Brunel Campus MapDocument2 pagesBrunel Campus MapKédian Lamin100% (1)
- Act 139 Factories and Machinery Act 1967Document45 pagesAct 139 Factories and Machinery Act 1967Adam Haida & Co100% (2)
- Daniel A. Wren, The Late Ronald G. Greenwood-Management Innovators - The People and Ideas That Have Shaped Modern Business-Oxford University Press, USA (1998)Document265 pagesDaniel A. Wren, The Late Ronald G. Greenwood-Management Innovators - The People and Ideas That Have Shaped Modern Business-Oxford University Press, USA (1998)jawhargallalaNo ratings yet
- Models 84803, 84804, 84806, 84808, 86810 3, 4 / 6, 8 & 10 In. Airmotors Series "B" Owners ManualDocument8 pagesModels 84803, 84804, 84806, 84808, 86810 3, 4 / 6, 8 & 10 In. Airmotors Series "B" Owners ManualLuis Carlos González LondoñoNo ratings yet
- British Rail Mark 5 (Intercity 250)Document4 pagesBritish Rail Mark 5 (Intercity 250)valicuinfoNo ratings yet
- Real Tax Cases - CAPPALDocument27 pagesReal Tax Cases - CAPPALJCapskyNo ratings yet
- Adaptive ReuseDocument7 pagesAdaptive ReuseSree NidhiNo ratings yet
- 000-Za-E-09303 - 0 Packing and Marking ProcedureDocument251 pages000-Za-E-09303 - 0 Packing and Marking Procedurealinor_tnNo ratings yet
- Vvinehab VeronaDocument29 pagesVvinehab VeronaGuillermo Aranda-MenaNo ratings yet
- PNR vs. IACDocument2 pagesPNR vs. IACNeil bryan Moninio100% (1)
- SRP DSL CatlougeDocument6 pagesSRP DSL CatlougePrasanna D MudubageNo ratings yet
- Feasibility - Electric Crematorium-Ilovepdf-Compressed PDFDocument40 pagesFeasibility - Electric Crematorium-Ilovepdf-Compressed PDFSwathi S Nair0% (1)
- 07 Dublin - SligoDocument6 pages07 Dublin - SligoLouise GalliganNo ratings yet
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionFrom EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionRating: 4 out of 5 stars4/5 (812)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessFrom EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- The Rise and Fall of the Dinosaurs: A New History of a Lost WorldFrom EverandThe Rise and Fall of the Dinosaurs: A New History of a Lost WorldRating: 4 out of 5 stars4/5 (597)
- World of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsFrom EverandWorld of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsRating: 4 out of 5 stars4/5 (223)
- The Other End of the Leash: Why We Do What We Do Around DogsFrom EverandThe Other End of the Leash: Why We Do What We Do Around DogsRating: 5 out of 5 stars5/5 (65)
- When You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsFrom EverandWhen You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsRating: 3.5 out of 5 stars3.5/5 (13)
- The Hidden Life of Trees: What They Feel, How They CommunicateFrom EverandThe Hidden Life of Trees: What They Feel, How They CommunicateRating: 4 out of 5 stars4/5 (1003)
- Fire Season: Field Notes from a Wilderness LookoutFrom EverandFire Season: Field Notes from a Wilderness LookoutRating: 4 out of 5 stars4/5 (142)
- The Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorFrom EverandThe Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorRating: 4.5 out of 5 stars4.5/5 (138)
- The Soul of an Octopus: A Surprising Exploration into the Wonder of ConsciousnessFrom EverandThe Soul of an Octopus: A Surprising Exploration into the Wonder of ConsciousnessRating: 4.5 out of 5 stars4.5/5 (254)
- Remnants of Ancient Life: The New Science of Old FossilsFrom EverandRemnants of Ancient Life: The New Science of Old FossilsRating: 3 out of 5 stars3/5 (3)
- The Lives of Bees: The Untold Story of the Honey Bee in the WildFrom EverandThe Lives of Bees: The Untold Story of the Honey Bee in the WildRating: 4.5 out of 5 stars4.5/5 (44)
- Spoiled Rotten America: Outrages of Everyday LifeFrom EverandSpoiled Rotten America: Outrages of Everyday LifeRating: 3 out of 5 stars3/5 (19)
- Ernst Haeckel's Art Forms in Nature: A Visual Masterpiece of the Natural WorldFrom EverandErnst Haeckel's Art Forms in Nature: A Visual Masterpiece of the Natural WorldNo ratings yet
- Darwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignFrom EverandDarwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignRating: 4 out of 5 stars4/5 (19)
- Come Back, Como: Winning the Heart of a Reluctant DogFrom EverandCome Back, Como: Winning the Heart of a Reluctant DogRating: 3.5 out of 5 stars3.5/5 (10)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 3.5 out of 5 stars3.5/5 (35)
- The Pleistocene Era: The History of the Ice Age and the Dawn of Modern HumansFrom EverandThe Pleistocene Era: The History of the Ice Age and the Dawn of Modern HumansRating: 4 out of 5 stars4/5 (5)
- Wayfinding: The Science and Mystery of How Humans Navigate the WorldFrom EverandWayfinding: The Science and Mystery of How Humans Navigate the WorldRating: 4.5 out of 5 stars4.5/5 (18)
- Why Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeFrom EverandWhy Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeRating: 4.5 out of 5 stars4.5/5 (699)