You might also like
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Handwritten Digit Recognition Using Machine LearningDocument5 pagesHandwritten Digit Recognition Using Machine LearningGowthami Reddy KovvuriNo ratings yet
- Deep Learning Approach For Object Detection Using CNN: AbstractDocument7 pagesDeep Learning Approach For Object Detection Using CNN: AbstractAYUSH MISHRANo ratings yet
- Soft Computing ITE1015 Assignment-1Document17 pagesSoft Computing ITE1015 Assignment-1harshNo ratings yet
- ReportDocument21 pagesReportkiswah computersNo ratings yet
- Micro-Doppler Signatures Based Human Activity Classification Using Dense-Inception Neural NetworkDocument6 pagesMicro-Doppler Signatures Based Human Activity Classification Using Dense-Inception Neural NetworkvanthanhsqttNo ratings yet
- Hafemann Ijcnn 2015Document7 pagesHafemann Ijcnn 2015Betül KaraNo ratings yet
- The 9 Deep Learning Papers You Need To Know About 3Document19 pagesThe 9 Deep Learning Papers You Need To Know About 3jatin1514No ratings yet
- A Face Detection Method Based On Cascade Convolutional Neural NetworkDocument18 pagesA Face Detection Method Based On Cascade Convolutional Neural Networkrakesh sharmaNo ratings yet
- 4119-Article Text-7900-1-10-20201227Document13 pages4119-Article Text-7900-1-10-20201227Ms. Divya KonikkaraNo ratings yet
- A High-Accuracy Model Average Ensemble of ConvolutDocument16 pagesA High-Accuracy Model Average Ensemble of ConvolutKedar SawantNo ratings yet
- A State-Of-The-Art Computer Vision Adopting Non - EDocument33 pagesA State-Of-The-Art Computer Vision Adopting Non - ErookyNo ratings yet
- Convolutional Neural Network For Image RecognitionDocument8 pagesConvolutional Neural Network For Image RecognitionIJRASETPublicationsNo ratings yet
- Recognition of Handwritten Digit Using Convolutional Neural Network in Python With Tensorflow and Comparison of Performance For Various Hidden LayersDocument6 pagesRecognition of Handwritten Digit Using Convolutional Neural Network in Python With Tensorflow and Comparison of Performance For Various Hidden Layersjaime yelsin rosales malpartidaNo ratings yet
- Convolutional Neural Network For Satellite Image ClassificationDocument14 pagesConvolutional Neural Network For Satellite Image Classificationwilliam100% (1)
- Patel Collage of Science and Technology Indore (M.P) : Lab IIDocument14 pagesPatel Collage of Science and Technology Indore (M.P) : Lab IIOorvi ThakurNo ratings yet
- Applications of DL For CV 23Document6 pagesApplications of DL For CV 23cheintNo ratings yet
- Understanding of A Convolutional Neural NetworkDocument6 pagesUnderstanding of A Convolutional Neural NetworkJavier BushNo ratings yet
- Imagify Reconstruction of High - Resolution Images From Degraded ImagesDocument5 pagesImagify Reconstruction of High - Resolution Images From Degraded ImagesIJRASETPublicationsNo ratings yet
- An Introduction To Convolutional Neural NetworksDocument7 pagesAn Introduction To Convolutional Neural NetworksIJRASETPublicationsNo ratings yet
- Classification of MNIST Image Dataset Using Improved Convolutional Neural NetworkDocument10 pagesClassification of MNIST Image Dataset Using Improved Convolutional Neural NetworkIJRASETPublicationsNo ratings yet
- Retele Neuronale ConvolutionaleDocument60 pagesRetele Neuronale ConvolutionaleElena CioroabaNo ratings yet
- 10 1109@iceaa 2019 8879110Document4 pages10 1109@iceaa 2019 8879110abdallahmussa199602No ratings yet
- Basic Introduction To Convolutional Neural Network in Deep LearningDocument9 pagesBasic Introduction To Convolutional Neural Network in Deep LearningNarsini AKSHARANo ratings yet
- Research Article: Concrete Cracks Detection Using Convolutional Neural Network Based On Transfer LearningDocument10 pagesResearch Article: Concrete Cracks Detection Using Convolutional Neural Network Based On Transfer LearningVihangaNo ratings yet
- A Deep Learning Convolutional Neural Network in Health Care EnvironmentDocument17 pagesA Deep Learning Convolutional Neural Network in Health Care EnvironmentVasiha Fathima RNo ratings yet
- CNN For Deep Learning - Convolutional Neural NetworksDocument10 pagesCNN For Deep Learning - Convolutional Neural Networkschowsaj9No ratings yet
- Deep Cascade LearningDocument11 pagesDeep Cascade Learningcoelho.alv4544No ratings yet
- BlackScholesNN PDFDocument15 pagesBlackScholesNN PDFPaula GusmãoNo ratings yet
- A - GNN - Architecture - With - Local - and - Global-Attention - Feature - For - Image - Classification 2Document13 pagesA - GNN - Architecture - With - Local - and - Global-Attention - Feature - For - Image - Classification 2Mustafa Mohammadi GharasuieNo ratings yet
- EM ML SurveyDocument4 pagesEM ML SurveysomedoodNo ratings yet
- Design and Evolution of Deep Convolutional Neural Networks in Image Classification - A ReviewDocument13 pagesDesign and Evolution of Deep Convolutional Neural Networks in Image Classification - A ReviewVatsala B RNo ratings yet
- A Comparative Study On Convolutional Neural Network Based Face RecognitionDocument5 pagesA Comparative Study On Convolutional Neural Network Based Face RecognitionNguyen Van ToanNo ratings yet
- Research AcvDocument6 pagesResearch Acvkuchhbhi0071No ratings yet
- Object Detection and Its Implementation On Android DevicesDocument8 pagesObject Detection and Its Implementation On Android DevicesPrateek singhNo ratings yet
- Final TDocument8 pagesFinal TPu SuNo ratings yet
- CNN Model For Image Classification Using Resnet: Dr. Senbagavalli M & Swetha Shekarappa GDocument10 pagesCNN Model For Image Classification Using Resnet: Dr. Senbagavalli M & Swetha Shekarappa GTJPRC PublicationsNo ratings yet
- SSRN Id3835625Document6 pagesSSRN Id3835625Supesh GawandeNo ratings yet
- Cloud Final Report PDFDocument7 pagesCloud Final Report PDFPu SuNo ratings yet
- Data Science Interview Preparation (# DAY 22)Document16 pagesData Science Interview Preparation (# DAY 22)ThànhĐạt NgôNo ratings yet
- Data Science Interview Preparation 22Document16 pagesData Science Interview Preparation 22Julian TolosaNo ratings yet
- Data Science Interview Preparation (# DAY 22)Document16 pagesData Science Interview Preparation (# DAY 22)ARPAN MAITYNo ratings yet
- Face Tracking With Convolutional Neural Network Heat-Map: February 2018Document7 pagesFace Tracking With Convolutional Neural Network Heat-Map: February 2018kavi testNo ratings yet
- Batik Image Retrieval Using Convolutional Neural Network PDFDocument9 pagesBatik Image Retrieval Using Convolutional Neural Network PDFputriNo ratings yet
- A Review of Artificial Neural Networks Applications in Microwave Computer-Aided Design Invited ArticleDocument17 pagesA Review of Artificial Neural Networks Applications in Microwave Computer-Aided Design Invited Articledsa sdsddsddsNo ratings yet
- FlowNet - Learning Optical Flow With CNNDocument9 pagesFlowNet - Learning Optical Flow With CNNsobuz visualNo ratings yet
- Signal Processing With Pulse Trains: An Algebraic Approach-Part IDocument11 pagesSignal Processing With Pulse Trains: An Algebraic Approach-Part IgabrielnallathNo ratings yet
- Deep Crowd Counting in Congested Scenes Through Refine ModulesDocument10 pagesDeep Crowd Counting in Congested Scenes Through Refine ModulesDrPoonam SharmaNo ratings yet
- 10 1109ICEngTechnol 2017 83081861 PDFDocument7 pages10 1109ICEngTechnol 2017 83081861 PDFAditi JaiswalNo ratings yet
- On An Improvement of Graph Convolutional Network in Semi-Supervised LearningDocument4 pagesOn An Improvement of Graph Convolutional Network in Semi-Supervised LearningThien ThaiNo ratings yet
- Comparing CNN and Imaging Processing Seismic Fault Detection Methods, Qi, Et Al, 2020Document4 pagesComparing CNN and Imaging Processing Seismic Fault Detection Methods, Qi, Et Al, 2020Andrés ManuelNo ratings yet
- Net 2018 11 1 - 12Document7 pagesNet 2018 11 1 - 12mirandasuryaprakash_No ratings yet
- Real Time Face Recognition Based On Convolution Neural NetworkDocument4 pagesReal Time Face Recognition Based On Convolution Neural NetworkCNS CNSNo ratings yet
- 5 Days InetrnshipDocument48 pages5 Days InetrnshipsowmiNo ratings yet
- A Simplified Generative Model Based On Gradient Descent and Mean Square ErrorDocument8 pagesA Simplified Generative Model Based On Gradient Descent and Mean Square ErrorOmar Lopez-RinconNo ratings yet
- Approx - Multiplierusing NNDocument12 pagesApprox - Multiplierusing NNSelva KumarNo ratings yet
- Demystifying The Mathematics Behind Convolutional Neural Networks (CNNS)Document19 pagesDemystifying The Mathematics Behind Convolutional Neural Networks (CNNS)faisalNo ratings yet
- Futureinternet 12 00113 v2Document22 pagesFutureinternet 12 00113 v2Persephone RaitoNo ratings yet
- Implementation of FaceNet and Support Vector Machine in A Real-Time Web-Based Timekeeping ApplicationDocument9 pagesImplementation of FaceNet and Support Vector Machine in A Real-Time Web-Based Timekeeping ApplicationIAES IJAINo ratings yet
- Feature Extraction Using Convolution Neural Networks (CNN) and Deep LearningDocument5 pagesFeature Extraction Using Convolution Neural Networks (CNN) and Deep LearningHarshitha SNo ratings yet
- IJRTEDocument6 pagesIJRTEsundarrajanNo ratings yet
- IJEATDocument6 pagesIJEATsundarrajanNo ratings yet
- IJCRDocument6 pagesIJCRsundarrajanNo ratings yet
- Greedy AlgorithmDocument5 pagesGreedy AlgorithmsundarrajanNo ratings yet
- Imx 8 MncecDocument114 pagesImx 8 MncecNoel LiarteNo ratings yet
- Interns ChoiceDocument1 pageInterns ChoiceBen ShaneNo ratings yet
- 1A Student Basic Reservation Work EssentialsDocument12 pages1A Student Basic Reservation Work Essentialsmaymana moutieNo ratings yet
- Desigo CC V6 Global Data SheetDocument10 pagesDesigo CC V6 Global Data SheetPio Wilde Quispe GarciaNo ratings yet
- Proofpoint Etpro Subscription OverviewDocument12 pagesProofpoint Etpro Subscription OverviewAyoub MosbahNo ratings yet
- VKP80IIDocument104 pagesVKP80IIsdvfsNo ratings yet
- Compiler Design LabDocument61 pagesCompiler Design Labshivam bindalNo ratings yet
- Test Reports of Greenpacket UT-235Document13 pagesTest Reports of Greenpacket UT-235mmlipu.iosNo ratings yet
- Type Script Notes For ProfessionalsDocument97 pagesType Script Notes For ProfessionalsSabrinaNo ratings yet
- Prog 3112 Week 11-19Document18 pagesProg 3112 Week 11-19Tanga KaNo ratings yet
- Crio Fellowship HandbookDocument26 pagesCrio Fellowship Handbook202Harsh VermaNo ratings yet
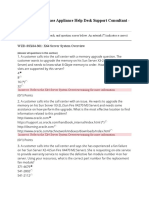
- Oracle Database Appliance Help Desk Support Consultant - Online AssessmentDocument35 pagesOracle Database Appliance Help Desk Support Consultant - Online AssessmentashisNo ratings yet
- Ebook Digital Design Principles and Practices PDF Full Chapter PDFDocument67 pagesEbook Digital Design Principles and Practices PDF Full Chapter PDFjimmie.kirby650100% (27)
- Flow Indicator Totalizer: Electronics Systems and DevicesDocument2 pagesFlow Indicator Totalizer: Electronics Systems and DevicesAnand BagadeNo ratings yet
- Z-Stack OTA Upgrade User's GuideDocument46 pagesZ-Stack OTA Upgrade User's GuideThanh nhaNo ratings yet
- Gazette12th A23Document1,282 pagesGazette12th A23sani sahibNo ratings yet
- Usecase DiagramDocument4 pagesUsecase Diagramharibabu madaNo ratings yet
- Chapter 2: Technology Infrastructure: The Internet and The World Wide WebDocument4 pagesChapter 2: Technology Infrastructure: The Internet and The World Wide WebMuzamil HaqmalNo ratings yet
- Applications of Artificial IntelligenceDocument16 pagesApplications of Artificial IntelligenceFred ReynoldsNo ratings yet
- Mysql Enterprise Edition: Product GuideDocument27 pagesMysql Enterprise Edition: Product GuideVarun NairNo ratings yet
- Namita Jakkulwar Email: Mob: 9975691743Document3 pagesNamita Jakkulwar Email: Mob: 9975691743Chinmaya SahooNo ratings yet
- Imp Questions With AnswersDocument60 pagesImp Questions With AnswersAnurag JainNo ratings yet
- CooVox-U50 DatasheetDocument2 pagesCooVox-U50 DatasheetAbdelhamid Ait mohandNo ratings yet
- FYP Dissertation Bajgai N 00433761 Stc392 SampleDocument79 pagesFYP Dissertation Bajgai N 00433761 Stc392 SampleunnizaNo ratings yet
- Digital Technology, Data, and DevicesDocument80 pagesDigital Technology, Data, and DevicesMd Azani Sham100% (1)
- Source Code For Hospital Management System in C++Document12 pagesSource Code For Hospital Management System in C++Rajiv Kumar Garg20% (5)
- Modern CryptographyDocument6 pagesModern Cryptographyprakash kumar katwal0% (1)
- 19BCE0422Document3 pages19BCE0422Garvit AroraNo ratings yet
- Tri-Axial Groundborne Vibration Meter: Simultaneous PPV, VDV, Dominant Frequency & DisplacementDocument4 pagesTri-Axial Groundborne Vibration Meter: Simultaneous PPV, VDV, Dominant Frequency & DisplacementHarry PotterNo ratings yet
- Introduction To Agile Using ScrumDocument102 pagesIntroduction To Agile Using ScrumjclaudiofariasNo ratings yet
- The Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsFrom EverandThe Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsRating: 4.5 out of 5 stars4.5/5 (10)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)From EverandAutodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)No ratings yet
- SolidWorks 2016 Learn by doing 2016 - Part 2From EverandSolidWorks 2016 Learn by doing 2016 - Part 2Rating: 4 out of 5 stars4/5 (1)
- Designing SCADA Application Software: A Practical ApproachFrom EverandDesigning SCADA Application Software: A Practical ApproachNo ratings yet
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet