You might also like
- Lovato 2013Document5 pagesLovato 2013AjaNo ratings yet
- Isprs Archives XLII 3 2487 2018Document4 pagesIsprs Archives XLII 3 2487 2018Seven WhiteNo ratings yet
- AIAA441RobustOptReview06 PDFDocument12 pagesAIAA441RobustOptReview06 PDFJahanzaib RajputNo ratings yet
- A Comparison of SIFT and Harris Conner Features For Correspondence Points MatchingDocument4 pagesA Comparison of SIFT and Harris Conner Features For Correspondence Points Matchingrajali gintingNo ratings yet
- Robust Design-An OverviewDocument12 pagesRobust Design-An OverviewFabio MeiNo ratings yet
- Blur and DisorderDocument8 pagesBlur and DisorderdavidrojasvNo ratings yet
- Lecture4 - Convnets For CV SlideDocument65 pagesLecture4 - Convnets For CV SlidemohdharislcpNo ratings yet
- Dis CoDocument40 pagesDis CothingNo ratings yet
- Physics: Crash Course For JEE Main 2020Document16 pagesPhysics: Crash Course For JEE Main 2020Ayush SharmaNo ratings yet
- Alevizos IntroductiontoSAGA GIS v4Document19 pagesAlevizos IntroductiontoSAGA GIS v4roma bairaNo ratings yet
- Visible Surface DetectionDocument42 pagesVisible Surface Detectionmanishbhavesh100% (1)
- Articol Bunde Tinut MinteDocument6 pagesArticol Bunde Tinut MinteMihaela BulmăuNo ratings yet
- Contouring With UncertaintyDocument9 pagesContouring With UncertaintyGonn BandaNo ratings yet
- Edge Detection: CSE 576 Ali FarhadiDocument40 pagesEdge Detection: CSE 576 Ali FarhadiHui ZhaoNo ratings yet
- Computer Vision and Image Computer Vision and Image Processing (CSEL Processing (CSEL - 393) 393) 3Document19 pagesComputer Vision and Image Computer Vision and Image Processing (CSEL Processing (CSEL - 393) 393) 3ali sheikhNo ratings yet
- GHT For The Recognize of Overlap ObjDocument12 pagesGHT For The Recognize of Overlap ObjLê Hải ĐăngNo ratings yet
- 2-D Direction Histogram Based Entropic Thresholding - 2013 - Neurocomputing - Yimit Et AlDocument11 pages2-D Direction Histogram Based Entropic Thresholding - 2013 - Neurocomputing - Yimit Et AlmausamNo ratings yet
- HOG 2011 StanfordDocument46 pagesHOG 2011 StanfordTrần Ngoc NhấtNo ratings yet
- Proposal of Edge-Preserving, Image Noise Reduction Filter For Using L2-NormDocument6 pagesProposal of Edge-Preserving, Image Noise Reduction Filter For Using L2-NormDan RiosNo ratings yet
- 2021 - Feroza Mirajkar - IJ - An Extensive Survey On Edge Detection TechniquesDocument8 pages2021 - Feroza Mirajkar - IJ - An Extensive Survey On Edge Detection TechniquesS Vasu KrishnaNo ratings yet
- MIPRO2016 Susanj DCVIS3793Document3 pagesMIPRO2016 Susanj DCVIS3793Snejk BitsNo ratings yet
- Towards Better Understanding of SAR Image FeatureDocument9 pagesTowards Better Understanding of SAR Image FeatureprabhuNo ratings yet
- Cvpr06 EdgeDocument8 pagesCvpr06 EdgezhangcongNo ratings yet
- Scholar Pedia SiftDocument18 pagesScholar Pedia SiftHarsh TagotraNo ratings yet
- Feature Detection: Jayanta Mukhopadhyay Dept. of Computer Science and EnggDocument54 pagesFeature Detection: Jayanta Mukhopadhyay Dept. of Computer Science and EnggsutanuberaNo ratings yet
- A Review Paper On Image SegmentationDocument3 pagesA Review Paper On Image SegmentationPREET GADANo ratings yet
- CG 7Document8 pagesCG 7Sujan TimalsinaNo ratings yet
- Resolution Priority Holographic Stereogram Based On Integral Imaging With Enhanced Depth RangeDocument14 pagesResolution Priority Holographic Stereogram Based On Integral Imaging With Enhanced Depth RangeDANIELA MENDEZ HERRERANo ratings yet
- Computer Vision ch4Document100 pagesComputer Vision ch4ssNo ratings yet
- Feature Point Detection in Multiframe Images: 2 Present State-Of-The-ArtDocument6 pagesFeature Point Detection in Multiframe Images: 2 Present State-Of-The-ArtzeroumNo ratings yet
- Bayesian SAE Using Complex Survey DataDocument71 pagesBayesian SAE Using Complex Survey Datas8nd11d UNINo ratings yet
- Color Image Segmentation in RGB Using Vector Angle and Absolute Difference MeasuresDocument5 pagesColor Image Segmentation in RGB Using Vector Angle and Absolute Difference MeasuresVarsha PatilNo ratings yet
- Digital Image Processing & Computer Vision: Edge DetectionDocument56 pagesDigital Image Processing & Computer Vision: Edge Detectionkparisa05No ratings yet
- Feature Selection UNIT 4Document40 pagesFeature Selection UNIT 4sujitha100% (2)
- Part 08Document38 pagesPart 08Thomas SunNo ratings yet
- Object DetectionDocument57 pagesObject Detectionvasanth rathodNo ratings yet
- Computational MethodsDocument7 pagesComputational Methodssamikasan0516No ratings yet
- EdgedetectionDocument46 pagesEdgedetectionHkmark LeeNo ratings yet
- Dip Unit 4Document58 pagesDip Unit 4sheikdavoodNo ratings yet
- CS344: Introduction To Artificial Intelligence: Pushpak BhattacharyyaDocument32 pagesCS344: Introduction To Artificial Intelligence: Pushpak BhattacharyyaAbhay BhaskarNo ratings yet
- 3.1 Notes: ReflectionsDocument13 pages3.1 Notes: ReflectionsffgfgfgffgNo ratings yet
- Holistically-Nested Edge DetectionDocument9 pagesHolistically-Nested Edge Detectionnathalia bNo ratings yet
- Ieee Exp Pap-AbfDocument4 pagesIeee Exp Pap-AbfSanthanamari GNo ratings yet
- Edge Detection and Hough TransformDocument5 pagesEdge Detection and Hough TransformAnonymous vjHBiIYNo ratings yet
- Learning-Based Methods For VO and Global LocalizationDocument17 pagesLearning-Based Methods For VO and Global LocalizationNguyễn Anh MinhNo ratings yet
- Hyperspectral Edge Filtering For Measuring Homogeneity of Surface Cover Types BakkerDocument11 pagesHyperspectral Edge Filtering For Measuring Homogeneity of Surface Cover Types BakkerAmarjargal DavaadorjNo ratings yet
- 6 Sin HaDocument9 pages6 Sin HaNeha AroraNo ratings yet
- Everything Is Connected: Graph Neural Networks: Petar Veli Ckovi CDocument14 pagesEverything Is Connected: Graph Neural Networks: Petar Veli Ckovi CJoséVíctorRiveroNo ratings yet
- Recognizing Pictures at An Exhibition Using SIFTDocument5 pagesRecognizing Pictures at An Exhibition Using SIFTAmit Kumar MondalNo ratings yet
- 4112-Article Text-11304-1-10-20191122Document10 pages4112-Article Text-11304-1-10-20191122Hadjer FradiNo ratings yet
- Feature CombinationsDocument5 pagesFeature Combinationssatishkumar697No ratings yet
- Visible-Surface Detection Methods: CS3162 Introduction To Computer GraphicsDocument10 pagesVisible-Surface Detection Methods: CS3162 Introduction To Computer GraphicsathiraNo ratings yet
- Analysis of A Biologically-Inspired System For Real-Time Object RecognitionDocument15 pagesAnalysis of A Biologically-Inspired System For Real-Time Object Recognitionsarsura9727No ratings yet
- Scale Invariant Feature Transform: Tony LindebergDocument18 pagesScale Invariant Feature Transform: Tony LindebergVeronica NitaNo ratings yet
- Image Processing Introduction and Application: Gaurav Gupta Shobhit NiranjanDocument47 pagesImage Processing Introduction and Application: Gaurav Gupta Shobhit NiranjanDr Sameer Chakravarthy VVSSNo ratings yet
- Face Recognition Using SURF FeaturesDocument7 pagesFace Recognition Using SURF FeaturesLEK GEFORCENo ratings yet
- Poisson Vector Graphics (PVG)Document11 pagesPoisson Vector Graphics (PVG)zhujianzhaiNo ratings yet
- A Conceptual Study On Image Matching Techniques: Global Journal of Computer Science and TechnologyDocument6 pagesA Conceptual Study On Image Matching Techniques: Global Journal of Computer Science and TechnologySai AravindNo ratings yet
- Feature-Oriented Coupled Bidirectional Flow For Image Denoising and Edge SharpeningDocument5 pagesFeature-Oriented Coupled Bidirectional Flow For Image Denoising and Edge Sharpeninghutagalung ardiNo ratings yet
- Part 06Document26 pagesPart 06Thomas SunNo ratings yet
- Part 12Document38 pagesPart 12Thomas SunNo ratings yet
- Part 08Document38 pagesPart 08Thomas SunNo ratings yet
- Part 09Document42 pagesPart 09Thomas SunNo ratings yet
- EOS IT Support Service L1 & L2 PDFDocument72 pagesEOS IT Support Service L1 & L2 PDFብርሃነ ኣፅብሃ0% (1)
- Low Voltage Alternator - 4 Pole: 410 To 660 kVA - 50 HZ / 510 To 825 kVA - 60 HZ Electrical and Mechanical DataDocument12 pagesLow Voltage Alternator - 4 Pole: 410 To 660 kVA - 50 HZ / 510 To 825 kVA - 60 HZ Electrical and Mechanical DataJuly E. Maldonado M.No ratings yet
- JFSM Active Flow ControlDocument9 pagesJFSM Active Flow ControlFahmi IzzuddinNo ratings yet
- Cont933 Course Culminating Activity Zachariah StuiveDocument8 pagesCont933 Course Culminating Activity Zachariah Stuiveapi-397481979No ratings yet
- Comix 35Document6 pagesComix 35oriol.berges.bergadaNo ratings yet
- Case Study 1Document9 pagesCase Study 1ashish92230% (1)
- Type Inserts With Hole: VNMG 16 04 02-FHDocument3 pagesType Inserts With Hole: VNMG 16 04 02-FHTungstenCarbideNo ratings yet
- Elevator Traffic AnalysisDocument52 pagesElevator Traffic Analysisstanjack99No ratings yet
- Class 10 Science Notes in Hindi-Genetics-And-Biological-Evolution PDFDocument15 pagesClass 10 Science Notes in Hindi-Genetics-And-Biological-Evolution PDFVinothKumarVinothNo ratings yet
- Renolit Alkorplan 00414 15mm + Lacquer enDocument2 pagesRenolit Alkorplan 00414 15mm + Lacquer enIngénieur CivilNo ratings yet
- Fanuc RS232Document6 pagesFanuc RS232berbigou100% (1)
- A Very Important Thread Thread by Nishant Bliss Mar 16, 22 From RattibhaDocument5 pagesA Very Important Thread Thread by Nishant Bliss Mar 16, 22 From RattibhaSyedmahmoodNo ratings yet
- Chapter 5 Describe Features of Conversational AI Workloads On Azure - Exam Ref AI-900 Microsoft Azure AI FundamentalsDocument28 pagesChapter 5 Describe Features of Conversational AI Workloads On Azure - Exam Ref AI-900 Microsoft Azure AI FundamentalsRishita ReddyNo ratings yet
- Pipe and Tube Sizes PDFDocument32 pagesPipe and Tube Sizes PDFAlvaro Gonza HuallaNo ratings yet
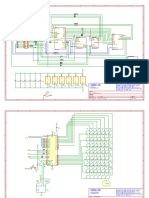
- Functional Description: Spicer Off-HighwayDocument13 pagesFunctional Description: Spicer Off-HighwayАнатолій Гуменюк100% (4)
- Galco ThyristoresDocument3 pagesGalco ThyristoresanonimoNo ratings yet
- CMW Testing WLAN - App Bro - en - 5214 8631 92 - v0201Document20 pagesCMW Testing WLAN - App Bro - en - 5214 8631 92 - v0201KevinSanchezNo ratings yet
- Toyota AlternatorsDocument3 pagesToyota Alternatorsdohar sNo ratings yet
- Concrete Slump Tests - Measuring The Workability of Concrete - Total ConcreteDocument7 pagesConcrete Slump Tests - Measuring The Workability of Concrete - Total ConcreteMOHAMED ELMASLAMANYNo ratings yet
- Digital Marketing For FarmersDocument5 pagesDigital Marketing For Farmerssuresh mpNo ratings yet
- Annual Product Report (APR/APQR/PQR)Document9 pagesAnnual Product Report (APR/APQR/PQR)jaimurugeshNo ratings yet
- Business Customer Information Form: Registered Business Name: Store/Shop/Outlet Name/Trade NameDocument3 pagesBusiness Customer Information Form: Registered Business Name: Store/Shop/Outlet Name/Trade NameRodelLaborNo ratings yet
- CodeDocument3 pagesCodeSi Yang LeeNo ratings yet
- Lembar Ukk Ud AbadiDocument62 pagesLembar Ukk Ud Abadibayufitriani3953% (15)
- 3 Way Control Valve STEVI 450-451Document22 pages3 Way Control Valve STEVI 450-451Ricky 83No ratings yet
- MS (Scaffolding)Document2 pagesMS (Scaffolding)Zubair Ahmed KhaskheliNo ratings yet
- WedgeARP AMB v2.1 Training - Module G - OperationsDocument59 pagesWedgeARP AMB v2.1 Training - Module G - Operationsahmed gaafarNo ratings yet
- 1953 Instructions For Lionel Trains and AccessoriesDocument69 pages1953 Instructions For Lionel Trains and AccessoriesThor Sheil97% (63)
- SFX 3100/4100 SERIES: Dvb/Ip Multimedia Receiver RouterDocument2 pagesSFX 3100/4100 SERIES: Dvb/Ip Multimedia Receiver Routerfrancescoli80No ratings yet
- Gen Ed 3 and 4Document96 pagesGen Ed 3 and 4Sabalza, Ruffelyn AnnNo ratings yet