You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Roles of Artificial Intelligence in Construction Engineering and Management - A Critical Review and Future TrendsDocument21 pagesRoles of Artificial Intelligence in Construction Engineering and Management - A Critical Review and Future TrendsSung Woo ShinNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- TMForum-Telco Revenue Growth BenchmarkDocument86 pagesTMForum-Telco Revenue Growth BenchmarkHasan Mukti100% (1)
- Project Proposal: Arduino Based Home Automation System: ObjectivesDocument1 pageProject Proposal: Arduino Based Home Automation System: ObjectivesAbdul Rahim KhanNo ratings yet
- Tourism Trends 13 Opportunities For The Tourism IndustryDocument14 pagesTourism Trends 13 Opportunities For The Tourism IndustryNoorullah NoonariNo ratings yet
- A Smart Gym Framework: Theoretical ApproachDocument6 pagesA Smart Gym Framework: Theoretical ApproachciccioNo ratings yet
- Bis Lol Lol Cases-DimampatkanDocument46 pagesBis Lol Lol Cases-DimampatkanIzatti AyuniNo ratings yet
- Wl18Xxmod Wilink™ 8 Single-Band Combo Module - Wi-Fi, Bluetooth, and Bluetooth Low Energy (Le)Document50 pagesWl18Xxmod Wilink™ 8 Single-Band Combo Module - Wi-Fi, Bluetooth, and Bluetooth Low Energy (Le)asokanenNo ratings yet
- Amity University: - UTTAR PRADESHDocument8 pagesAmity University: - UTTAR PRADESHSharmishtha PandeyNo ratings yet
- Artificial Intelligence How It Changes The FutureDocument89 pagesArtificial Intelligence How It Changes The FutureShin Ito100% (1)
- Happiestminds Corporate Brochure PDFDocument4 pagesHappiestminds Corporate Brochure PDFmadhukiranNo ratings yet
- Smart CitiesDocument6 pagesSmart CitiesMaaz AshrafNo ratings yet
- Smart Brooder PresentationDocument18 pagesSmart Brooder PresentationTsom BinsalmanNo ratings yet
- Integration of IoT and Fog Computing in Healthcare Based The Smart Intensive UnitsDocument13 pagesIntegration of IoT and Fog Computing in Healthcare Based The Smart Intensive UnitsHajaros RegraguiNo ratings yet
- Investigating The Role of Big Data and Internet of Things (IoT) in Smart CitiesDocument28 pagesInvestigating The Role of Big Data and Internet of Things (IoT) in Smart CitiesGeorgeMNo ratings yet
- MergedDocument13 pagesMergedtahaashraf160No ratings yet
- Tech Trends Exec SummaryDocument18 pagesTech Trends Exec Summaryjuan pablo a dalmassoNo ratings yet
- Vertical Hydroponic Farm - Arduino Project HubDocument31 pagesVertical Hydroponic Farm - Arduino Project HubHerwan GalinggingNo ratings yet
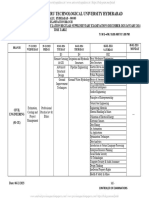
- FN B.Tech IV - I R18Document9 pagesFN B.Tech IV - I R18VigneshNo ratings yet
- Moduino ENDocument4 pagesModuino ENaabejaroNo ratings yet
- 1532418738Document15 pages1532418738PNG networksNo ratings yet
- Data Science Cybersecurity and UX Design Data Communication Critical Thinking Emotional IntelligenceDocument8 pagesData Science Cybersecurity and UX Design Data Communication Critical Thinking Emotional IntelligenceAbdullah ZubairNo ratings yet
- Sensors: Design, Construction and Testing of Iot Based Automated Indoor Vertical Hydroponics Farming Test-Bed in QatarDocument24 pagesSensors: Design, Construction and Testing of Iot Based Automated Indoor Vertical Hydroponics Farming Test-Bed in QatarDeckster DeveraNo ratings yet
- GVS NEW CATALOG Smart Builiding Control Systems v5.0Document16 pagesGVS NEW CATALOG Smart Builiding Control Systems v5.0BudKhNo ratings yet
- Hello Industrie 4.0: We Go DigitalDocument34 pagesHello Industrie 4.0: We Go DigitalhaNo ratings yet
- Internet of Things: A Survey On The Security of Iot FrameworksDocument21 pagesInternet of Things: A Survey On The Security of Iot FrameworksDwdroo DiwokNo ratings yet
- Data Science PythonDocument42 pagesData Science PythonZADOD YASSINENo ratings yet
- Unified Threat Detection For AWS Cloud and Containers - CSADocument23 pagesUnified Threat Detection For AWS Cloud and Containers - CSAjelen_againNo ratings yet
- Society 5.0 and Social Development: Contributions To A DiscussionDocument6 pagesSociety 5.0 and Social Development: Contributions To A DiscussionqoneviNo ratings yet
- 5G Radio Access NetworkDocument317 pages5G Radio Access NetworkWilliam Jaldin Corrales100% (1)
- Application of Blockchain Technology in Healthcare: A Comprehensive StudyDocument9 pagesApplication of Blockchain Technology in Healthcare: A Comprehensive StudyResma GhimireNo ratings yet