You might also like
- Journal ENMG 2Document7 pagesJournal ENMG 2novy rosalia chandraNo ratings yet
- JP - 13Upper-Limb Powered Exoskeleton DesignDocument10 pagesJP - 13Upper-Limb Powered Exoskeleton DesignCostinel BogheanuNo ratings yet
- Predicting The Performance and Adaptation of Artificial Elbow Due To Effective Forces Using Deep LearningDocument7 pagesPredicting The Performance and Adaptation of Artificial Elbow Due To Effective Forces Using Deep LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Astesj 0203111Document9 pagesAstesj 0203111Eng Hanaa7No ratings yet
- Evaluating EEG_EMG Fusion for Wearable Upper-Limb Rehabilitation RobotsDocument423 pagesEvaluating EEG_EMG Fusion for Wearable Upper-Limb Rehabilitation RobotsAnh HuyNo ratings yet
- 2016 Biorob DesignandEvaluationofAVibrotactileFeedbackSystemtoImproveVolitionalMyoelectricControlforRoboticTranstibialProsthesesDocument7 pages2016 Biorob DesignandEvaluationofAVibrotactileFeedbackSystemtoImproveVolitionalMyoelectricControlforRoboticTranstibialProsthesesTrésor NaraNo ratings yet
- Contreras-Vidal 2016 J. Neural Eng. 13 031001Document17 pagesContreras-Vidal 2016 J. Neural Eng. 13 031001Vitor Alves CruzNo ratings yet
- Development of An Upper Limb Exoskeleton For Rehabilitation With Feedback From EMG and IMU SensorDocument7 pagesDevelopment of An Upper Limb Exoskeleton For Rehabilitation With Feedback From EMG and IMU SensorkeerthiNo ratings yet
- Closed-Loop Control of Grasping With A Myoelectric Hand Prosthesis: Which Are The Relevant Feedback Variables For Force Control?Document12 pagesClosed-Loop Control of Grasping With A Myoelectric Hand Prosthesis: Which Are The Relevant Feedback Variables For Force Control?alejasoto17No ratings yet
- 2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerDocument6 pages2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerANSHUMAAN P BHAGATNo ratings yet
- Design and Implementation of Prosthetic Arm UsingDocument6 pagesDesign and Implementation of Prosthetic Arm UsingNada GhammemNo ratings yet
- EEG Mind Controlled Smart Prosthetic ArmDocument7 pagesEEG Mind Controlled Smart Prosthetic ArmLenin CarrilloNo ratings yet
- Lowerbody Mathematical Model PDFDocument15 pagesLowerbody Mathematical Model PDFKaviraj SenguntharNo ratings yet
- Paper N2 PDFDocument13 pagesPaper N2 PDFKatherine Espinoza AvilaNo ratings yet
- Fleming 2021 J. Neural Eng. 18 041004Document23 pagesFleming 2021 J. Neural Eng. 18 041004u5600291No ratings yet
- Oscillator-Based Assistance of Cyclical Movements: Model-Based and Model-Free ApproachesDocument13 pagesOscillator-Based Assistance of Cyclical Movements: Model-Based and Model-Free Approaches李磊No ratings yet
- Yang 2018 J. Phys. Conf. Ser. 1087 062004Document7 pagesYang 2018 J. Phys. Conf. Ser. 1087 062004Jayakrishnan P SNo ratings yet
- Adaptive Control of Exoskeleton Robots For Periodic Assistive Behaviours Based On EMG Feedback MinimisationDocument26 pagesAdaptive Control of Exoskeleton Robots For Periodic Assistive Behaviours Based On EMG Feedback MinimisationSadoNo ratings yet
- Myoelectric Control With Abstract DecodersDocument16 pagesMyoelectric Control With Abstract DecodersLaura PasqualNo ratings yet
- 1114 4850 1 PBDocument5 pages1114 4850 1 PBmaketoNo ratings yet
- Novel Soft Bending Actuator-Based Power Augmentation Hand Exoskeleton Controlled by Human IntentionDocument22 pagesNovel Soft Bending Actuator-Based Power Augmentation Hand Exoskeleton Controlled by Human IntentionAlemeNo ratings yet
- Conexión Directa ANTIGUA (2009) Entre El Cerebro y Protesisdirect - Neural - Sensory - Feedback - and - Control - of - A - Prosthetic - ArmDocument5 pagesConexión Directa ANTIGUA (2009) Entre El Cerebro y Protesisdirect - Neural - Sensory - Feedback - and - Control - of - A - Prosthetic - ArmAERMNo ratings yet
- (2003) Improving Torque Output of Stroke Patients With Assitive Torque Controlled by EMG SignalsDocument6 pages(2003) Improving Torque Output of Stroke Patients With Assitive Torque Controlled by EMG Signalsjhonrt06mxNo ratings yet
- SensorsDocument30 pagesSensorsJuan sebastian lopez escobarNo ratings yet
- Classification of Wrist Movements Through EMG Signals With Fuzzy Logic AlgorithmDocument4 pagesClassification of Wrist Movements Through EMG Signals With Fuzzy Logic AlgorithmMushfiqur Rahman JimNo ratings yet
- Acquisition and Analysis of EMG Signals To Recognize Multiple Hand Movements For Prosthetic ApplicationsDocument12 pagesAcquisition and Analysis of EMG Signals To Recognize Multiple Hand Movements For Prosthetic ApplicationsEdgarGonzálezNo ratings yet
- Ninapro DatasetDocument8 pagesNinapro DatasetSindhu VasireddyNo ratings yet
- A Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelDocument11 pagesA Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelMannanHarshaNo ratings yet
- 2015 - Towards-a-Robotic-Knee-Exoskeleton-Control-Based-on-Human Intention Through EEG and sEMGsignalsDocument8 pages2015 - Towards-a-Robotic-Knee-Exoskeleton-Control-Based-on-Human Intention Through EEG and sEMGsignalsArun KumarNo ratings yet
- Proportional EMG Control For Upper-Limb Powered ExoskeletonsDocument5 pagesProportional EMG Control For Upper-Limb Powered ExoskeletonsHassan abokouraNo ratings yet
- 01 - 2020 - Usability Testing On DevelopedDocument10 pages01 - 2020 - Usability Testing On DevelopedFitri nuraini setiyowatiNo ratings yet
- Neuro MEMsDocument15 pagesNeuro MEMsDevika KishnanNo ratings yet
- An Attention-Controlled Hand Exoskeleton For The Rehabilitation of Finger Extension and Flexion Using A Rigid-Soft Combined MechanismDocument13 pagesAn Attention-Controlled Hand Exoskeleton For The Rehabilitation of Finger Extension and Flexion Using A Rigid-Soft Combined MechanismCarlos Arturo TorresNo ratings yet
- Cortical Control of GaitDocument10 pagesCortical Control of GaitchysaNo ratings yet
- Design of A Patient-Tailored Active Knee-Ankle-Foot Orthosis To Assist The Gait of Spinal Cord Injured SubjectsDocument2 pagesDesign of A Patient-Tailored Active Knee-Ankle-Foot Orthosis To Assist The Gait of Spinal Cord Injured SubjectsAlexandru NituNo ratings yet
- Sensors: Machine-Learning-Based Muscle Control of A 3D-Printed Bionic ArmDocument16 pagesSensors: Machine-Learning-Based Muscle Control of A 3D-Printed Bionic ArmDhinu LalNo ratings yet
- Performance of a Head Movement Interface for Wheelchair ControlDocument4 pagesPerformance of a Head Movement Interface for Wheelchair ControlMariachiaraRicciNo ratings yet
- EEG Signal Analysis and Characterization For The Aid of Disabled PeopleDocument8 pagesEEG Signal Analysis and Characterization For The Aid of Disabled PeopleShafayet UddinNo ratings yet
- Electronics: Analysis and Recognition of Human Lower Limb Motions Based On Electromyography (EMG) SignalsDocument21 pagesElectronics: Analysis and Recognition of Human Lower Limb Motions Based On Electromyography (EMG) SignalsAhmad M. DagamsehNo ratings yet
- EEG Artifact Removal-State-Of-The-Art and GuidelinesDocument24 pagesEEG Artifact Removal-State-Of-The-Art and GuidelinesYuanXin SuNo ratings yet
- 1 s2.0 S1877065715000779 MainDocument7 pages1 s2.0 S1877065715000779 Mainxian karachiNo ratings yet
- TMP 85 B1Document6 pagesTMP 85 B1FrontiersNo ratings yet
- The Development and Testing of A Human Machine Interface For A Mobile Medical ExoskeletonDocument6 pagesThe Development and Testing of A Human Machine Interface For A Mobile Medical ExoskeletonArsyad Zanadin RamadhanNo ratings yet
- Targeted Muscle Reinnervation For Real-Time Myoelectric Control of Multifunction Artificial ArmsDocument10 pagesTargeted Muscle Reinnervation For Real-Time Myoelectric Control of Multifunction Artificial ArmsSahana RangarajanNo ratings yet
- Jurnal 2Document7 pagesJurnal 2fauziahsalsabilNo ratings yet
- DWang YuchenDocument9 pagesDWang Yuchensafa ameurNo ratings yet
- Myoelectric Control Strategies For Rehabilitation RobotsDocument17 pagesMyoelectric Control Strategies For Rehabilitation Robotsmb.farooqui02No ratings yet
- Technical Seminar on Biomechatronic Hand ProsthesisDocument16 pagesTechnical Seminar on Biomechatronic Hand ProsthesisDeviprasad MNo ratings yet
- Neuroimage: Joseph T. Gwin, Klaus Gramann, Scott Makeig, Daniel P. FerrisDocument8 pagesNeuroimage: Joseph T. Gwin, Klaus Gramann, Scott Makeig, Daniel P. FerrisFrontiersNo ratings yet
- 2016 - Upper-Limb Stroke Rehabilitation Using Electrode-Array Based Functional Electrical Stimulation With Sensing and Control InnovationsDocument14 pages2016 - Upper-Limb Stroke Rehabilitation Using Electrode-Array Based Functional Electrical Stimulation With Sensing and Control InnovationsAlexandra NistorNo ratings yet
- Gábor Barton: Irtual Rehabilitation A Focus On Movement FunctionDocument8 pagesGábor Barton: Irtual Rehabilitation A Focus On Movement FunctionFrancisco Vicent PachecoNo ratings yet
- Intelligent Knee Prostheses A Systematic Review of Control StrategiesDocument19 pagesIntelligent Knee Prostheses A Systematic Review of Control Strategiesrkp17No ratings yet
- PIIS2405844023055160Document16 pagesPIIS2405844023055160Anh HuyNo ratings yet
- Upper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceDocument4 pagesUpper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceLaura CursaruNo ratings yet
- A Fairly Simple Mechatronic Device For Training Human Wrist MotionDocument15 pagesA Fairly Simple Mechatronic Device For Training Human Wrist Motionalamin khondakerNo ratings yet
- EEG Mind Controlled Smart Prosthetic Arm - A ComprDocument10 pagesEEG Mind Controlled Smart Prosthetic Arm - A ComprtaylanNo ratings yet
- Bionic GloveDocument7 pagesBionic GloveMd ShitolNo ratings yet
- A Visualization Framework For The Analysis of Neuromuscular SimulationsDocument11 pagesA Visualization Framework For The Analysis of Neuromuscular Simulationsyacipo evyushNo ratings yet
- Movement Biomechanics Goes Upwards-From The Leg To The ArmDocument10 pagesMovement Biomechanics Goes Upwards-From The Leg To The ArmMuhammad FahmyNo ratings yet
- Bionic Limb ReconstructionFrom EverandBionic Limb ReconstructionOskar C. AszmannNo ratings yet
- Unit 8 Grammar Short Test 1 A+B Impulse 2Document1 pageUnit 8 Grammar Short Test 1 A+B Impulse 2karpiarzagnieszka1No ratings yet
- 2020 Ifs InsuranceDocument262 pages2020 Ifs InsuranceSensi CTPrima100% (1)
- Educ 13C Questions For MidtermDocument9 pagesEduc 13C Questions For MidtermSannie MonoyNo ratings yet
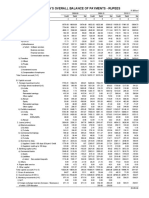
- Table 141: India'S Overall Balance of Payments - RupeesDocument2 pagesTable 141: India'S Overall Balance of Payments - Rupeesmahbobullah rahmaniNo ratings yet
- CPQMDocument2 pagesCPQMOlayinkaAweNo ratings yet
- Elementos ElectrónicosDocument9 pagesElementos ElectrónicosKratt DeividNo ratings yet
- LeCroy 1996 Catalog (Reduced Size) PDFDocument196 pagesLeCroy 1996 Catalog (Reduced Size) PDFpetrocelliNo ratings yet
- Assignment 2Document21 pagesAssignment 2api-445531772No ratings yet
- Space Management Guidelines: Brief SummaryDocument17 pagesSpace Management Guidelines: Brief SummaryMOHD JIDINo ratings yet
- Court Invalidates Mortgage Due to Bank's Lack of DiligenceDocument10 pagesCourt Invalidates Mortgage Due to Bank's Lack of DiligenceTokie TokiNo ratings yet
- Normalization Castuera BSCS2CDocument8 pagesNormalization Castuera BSCS2CRichard, Jr. CastueraNo ratings yet
- BEML - Annual - Report - FY 2022-2023Document335 pagesBEML - Annual - Report - FY 2022-2023NILESH SHETENo ratings yet
- Global Server Load Balancing: Cns 205-5I: Citrix Netscaler 10.5 Essentials and NetworkingDocument37 pagesGlobal Server Load Balancing: Cns 205-5I: Citrix Netscaler 10.5 Essentials and NetworkingsudharaghavanNo ratings yet
- Discharging A ClientDocument6 pagesDischarging A ClientNorman Batalla Juruena, DHCM, PhD, RNNo ratings yet
- Petitioner Vs Vs Respondents Marcial Esposo Eulogio F. Lerum M. A. FerrerDocument4 pagesPetitioner Vs Vs Respondents Marcial Esposo Eulogio F. Lerum M. A. Ferrerclarisse lyka hattonNo ratings yet
- Houghton Mifflin Harcourt Sap Document of UnderstandingDocument10 pagesHoughton Mifflin Harcourt Sap Document of UnderstandingSunil KumarNo ratings yet
- Serena Berman PW Res - 2020Document2 pagesSerena Berman PW Res - 2020Serena BermanNo ratings yet
- ) (Significant Digits Are Bounded To 1 Due To 500m. However I Will Use 2SD To Make More Sense of The Answers)Document4 pages) (Significant Digits Are Bounded To 1 Due To 500m. However I Will Use 2SD To Make More Sense of The Answers)JeevikaGoyalNo ratings yet
- The Spanish-American War (History 70)Document11 pagesThe Spanish-American War (History 70)Tine AtaamNo ratings yet
- Drive Unit TENH EH 10003, 225, 50/60Hz 400/440V: Qty. Description Specification Material Size DT Doc IdDocument1 pageDrive Unit TENH EH 10003, 225, 50/60Hz 400/440V: Qty. Description Specification Material Size DT Doc IdKarikalan JayNo ratings yet
- OptiLobe Rotary Lobe PumpDocument4 pagesOptiLobe Rotary Lobe PumpRemus-Mihai GheorghitaNo ratings yet
- Task 7 Family Disaster Risk Reduction and Management PlanDocument7 pagesTask 7 Family Disaster Risk Reduction and Management PlanHaise SasakiNo ratings yet
- Mycro 6 ManualDocument8 pagesMycro 6 ManualMario Rui InacioNo ratings yet
- GPU, A Gnutella Processing UnitDocument27 pagesGPU, A Gnutella Processing UnitMengotti Tiziano FlavioNo ratings yet
- CH 15 QuizDocument8 pagesCH 15 QuizNelano EastNo ratings yet
- As 2669-1983 Sulphuric Acid For Use in Lead-Acid BatteriesDocument7 pagesAs 2669-1983 Sulphuric Acid For Use in Lead-Acid BatteriesSAI Global - APACNo ratings yet
- Data Protection Act (DPA)Document14 pagesData Protection Act (DPA)Crypto SavageNo ratings yet
- Electricity Began With Man's Curiosity On The Peculiar Ability of Amber and Lodestone To Attract Other Material.Document2 pagesElectricity Began With Man's Curiosity On The Peculiar Ability of Amber and Lodestone To Attract Other Material.Axle Rose CastroNo ratings yet
- AI Writing Tools For Social Media Marketing Creating Compelling PostsDocument5 pagesAI Writing Tools For Social Media Marketing Creating Compelling PostsJames DanielsNo ratings yet
- Gliffy Public Diagram - ATM FlowchartDocument3 pagesGliffy Public Diagram - ATM Flowchartmy nNo ratings yet