You might also like
- IIT Bhubaneswar School of Electrical Sciences: Lab Schedule: Tue (2:30 Instructor: Teaching AssistantDocument3 pagesIIT Bhubaneswar School of Electrical Sciences: Lab Schedule: Tue (2:30 Instructor: Teaching AssistantNitishkumarreddyervaNo ratings yet
- Poster Submission51 (Tracking) PDFDocument1 pagePoster Submission51 (Tracking) PDFyolanda.vidalNo ratings yet
- Robust H Limited-Feedback Control Applied To Mechanical SystemsDocument11 pagesRobust H Limited-Feedback Control Applied To Mechanical SystemsjeanribeiroNo ratings yet
- A Robust Output-Feedback Control For The Cart-Pole System: A Super-Twisting Sliding-Mode ApproachDocument6 pagesA Robust Output-Feedback Control For The Cart-Pole System: A Super-Twisting Sliding-Mode ApproachSamy Kharuf GutierrezNo ratings yet
- Fractional Order Sliding Mode Control Based Chaos Synchronization and Secure CommunicationDocument6 pagesFractional Order Sliding Mode Control Based Chaos Synchronization and Secure CommunicationPRITAM PARALNo ratings yet
- Research Article: Nonlinear Dynamic Model-Based Adaptive Control of A Solenoid-Valve SystemDocument14 pagesResearch Article: Nonlinear Dynamic Model-Based Adaptive Control of A Solenoid-Valve SystemArrow96No ratings yet
- Online Identification of PMSM Parameters: Parameter Identifiability and Estimator Comparative StudyDocument14 pagesOnline Identification of PMSM Parameters: Parameter Identifiability and Estimator Comparative StudyDahnoun IlyasNo ratings yet
- Fuzzy Tracking Control Based On H Infinity For Performance For Permanent Magnet Synchronous MachineDocument7 pagesFuzzy Tracking Control Based On H Infinity For Performance For Permanent Magnet Synchronous MachinemezianeNo ratings yet
- Petráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalDocument12 pagesPetráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalcharifNo ratings yet
- Control of A Heat Exchanger Using Takagi-Sugeno Fuzzy ModelDocument6 pagesControl of A Heat Exchanger Using Takagi-Sugeno Fuzzy ModelLuis ZapataNo ratings yet
- Mathematical Modelling and Controller Design of Inverted PendulumDocument6 pagesMathematical Modelling and Controller Design of Inverted PendulumKuldeep KumarNo ratings yet
- Fractional Order Hold Circuits: Abstract - Many Real Dynamic Systems Are BetterDocument14 pagesFractional Order Hold Circuits: Abstract - Many Real Dynamic Systems Are BetterPawan PandayNo ratings yet
- Model-Free Decentralized Control For Robot Manipulators: of ofDocument6 pagesModel-Free Decentralized Control For Robot Manipulators: of ofDaniel Alvarado MejiaNo ratings yet
- Paper Inecce Published PDFDocument5 pagesPaper Inecce Published PDFVignesh RamakrishnanNo ratings yet
- Akiba2010 Optimal Tracking Control of Two-Wheeled MobileDocument6 pagesAkiba2010 Optimal Tracking Control of Two-Wheeled Mobilechaima bensNo ratings yet
- 柔性关节自适应控制Document8 pages柔性关节自适应控制文龙No ratings yet
- Ashis 2019Document5 pagesAshis 2019Pedro Cezar Rodrigues BaltazarNo ratings yet
- Chebli 2015Document6 pagesChebli 2015lahlouhNo ratings yet
- DC - DC Itterative - 3Document6 pagesDC - DC Itterative - 3sharifabd omarNo ratings yet
- RM 2019 1 Pag 04 HongDocument4 pagesRM 2019 1 Pag 04 HongLê TrungNo ratings yet
- IfacDocument8 pagesIfacT ChangNo ratings yet
- 1 s2.0 S1474667015364818 Main PDFDocument5 pages1 s2.0 S1474667015364818 Main PDFVignesh RamakrishnanNo ratings yet
- Life Management of 550 KV Oil-Impregnated TransformersDocument5 pagesLife Management of 550 KV Oil-Impregnated TransformersbenlahnecheNo ratings yet
- Using Transmission Lines III - Class 7 Purpose - Consider Finite Transition Time Edges and GTLDocument24 pagesUsing Transmission Lines III - Class 7 Purpose - Consider Finite Transition Time Edges and GTLspyeagleNo ratings yet
- Chattering Problem in Sliding Mode Control SystemsDocument5 pagesChattering Problem in Sliding Mode Control Systemsjap_thaygor5925No ratings yet
- Connection Between Continuous and DiscreteDocument8 pagesConnection Between Continuous and Discretesumathy SNo ratings yet
- Optimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsDocument12 pagesOptimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsjanitoNo ratings yet
- PSDC Ex1 HydroTurbine PDFDocument8 pagesPSDC Ex1 HydroTurbine PDFBrett HendricksNo ratings yet
- Design of Stable Fuzzy Controllers For An AGVDocument8 pagesDesign of Stable Fuzzy Controllers For An AGVMihai Alexandru OlaruNo ratings yet
- LQG Wind TurbineDocument5 pagesLQG Wind TurbineFian IlhamNo ratings yet
- Help Engineering Calculator RacknpinionDocument3 pagesHelp Engineering Calculator RacknpinionMohamed ElshenawyNo ratings yet
- Chapter 2 (Print)Document14 pagesChapter 2 (Print)666aokiNo ratings yet
- An Optimal Speed Controller For Permanent-Magnet Synchronous Motor DrivesDocument8 pagesAn Optimal Speed Controller For Permanent-Magnet Synchronous Motor Drives22dr0302No ratings yet
- Iccicct-070 S PandaDocument6 pagesIccicct-070 S PandagtchsekharNo ratings yet
- A Robust Adaptive Fuzzy Fast Terminal Synergetic Voltage Control Scheme For DC DC Buck ConverterDocument5 pagesA Robust Adaptive Fuzzy Fast Terminal Synergetic Voltage Control Scheme For DC DC Buck ConverterhoussinenechmaNo ratings yet
- Cascaded H-Bridge Multilevel Inverter With A Fault Detection Scheme Based On The Statistic Moments IndexesDocument6 pagesCascaded H-Bridge Multilevel Inverter With A Fault Detection Scheme Based On The Statistic Moments IndexesBeto MayoNo ratings yet
- Process Characteristics - 1st Order Lag & Dead-Time ProcessesDocument14 pagesProcess Characteristics - 1st Order Lag & Dead-Time Processesata4215No ratings yet
- Module IV Other Techniques of Integration and The Definite IntegralDocument15 pagesModule IV Other Techniques of Integration and The Definite IntegralShinTaxErrorNo ratings yet
- Simulink AdaptableDocument7 pagesSimulink AdaptableAdrian NairdaNo ratings yet
- An Investigation On The Design and Performance Assessment of Double-PID and LQR Controllers For The Inverted PendulumDocument7 pagesAn Investigation On The Design and Performance Assessment of Double-PID and LQR Controllers For The Inverted Pendulumpremkumarreddy_n4922No ratings yet
- IEEE Xplore Full-Text PDFDocument1 pageIEEE Xplore Full-Text PDF18321822460tNo ratings yet
- Elevator (Thang Máy)Document2 pagesElevator (Thang Máy)quân nguyễnNo ratings yet
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlsaeedNo ratings yet
- Transformacion de ParkDocument7 pagesTransformacion de ParkAnonymous V6y1QL6hnNo ratings yet
- Switching-Off Angle Control For Switched Reluctance Motor Using Adaptive Neural Fuzzy Inference SystemDocument8 pagesSwitching-Off Angle Control For Switched Reluctance Motor Using Adaptive Neural Fuzzy Inference SystemBharath ykNo ratings yet
- Comparison of State Estimators For A PermanentDocument6 pagesComparison of State Estimators For A PermanentNicola Claudiu-IonelNo ratings yet
- O2-4 Lovric D Full PDFDocument5 pagesO2-4 Lovric D Full PDFZadia CottoNo ratings yet
- Analysis and Design of A Multiple Feedback Loop Control Strategy For 1P Voltage-Source UPS Inverters (IEEE-TPE)Document10 pagesAnalysis and Design of A Multiple Feedback Loop Control Strategy For 1P Voltage-Source UPS Inverters (IEEE-TPE)Al Bajad MamadNo ratings yet
- Teknik Kendali Digital PDFDocument230 pagesTeknik Kendali Digital PDFWahyu Juliarto100% (3)
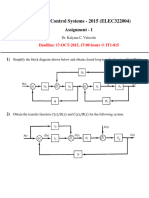
- Acs 2015s2 Assn1Document5 pagesAcs 2015s2 Assn1MiraelNo ratings yet
- Determiancion de Parametros para El Modelo de Maquina SincronaDocument9 pagesDetermiancion de Parametros para El Modelo de Maquina SincronaAlex SanchezNo ratings yet
- Design of Kalman Filters For Mobile Robots Evaluation of The Kinematic and Odometric ApproachDocument6 pagesDesign of Kalman Filters For Mobile Robots Evaluation of The Kinematic and Odometric ApproachShafayat AbrarNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapMarju LasluisaNo ratings yet
- Trajectory Tracking of Quaternion Based Quadrotor Using Model Predictive ControlDocument19 pagesTrajectory Tracking of Quaternion Based Quadrotor Using Model Predictive ControlMaidul IslamNo ratings yet
- A Simple Model For Transformer Inrush Current Calculation and Harmonic AnalysisDocument11 pagesA Simple Model For Transformer Inrush Current Calculation and Harmonic AnalysisDavid LopesNo ratings yet
- A Tension Distribution Algorithm For Cable-Driven Parallel Robots Operating Beyond Their Wrench-Feasible WorkspaceDocument7 pagesA Tension Distribution Algorithm For Cable-Driven Parallel Robots Operating Beyond Their Wrench-Feasible WorkspaceSiddharth UNo ratings yet
- Control de RetrocesoDocument6 pagesControl de RetrocesoFrank Dusk K DuskNo ratings yet
- Inverted Pendulum PDFDocument32 pagesInverted Pendulum PDFudayNo ratings yet
- ME389 MEM04 PendulumGantry GuidelineDocument14 pagesME389 MEM04 PendulumGantry GuidelineTarikuNo ratings yet
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Fault Detection in Base-Isolation Systems Via A Restoring Force ObserverDocument5 pagesFault Detection in Base-Isolation Systems Via A Restoring Force Observeryolanda.vidalNo ratings yet
- ABSTRACT FaultDetectionBenchmarkDocument1 pageABSTRACT FaultDetectionBenchmarkyolanda.vidalNo ratings yet
- Presentation CaldesMontbui YVSDocument36 pagesPresentation CaldesMontbui YVSyolanda.vidalNo ratings yet
- Poster Submission51 (Tracking) PDFDocument1 pagePoster Submission51 (Tracking) PDFyolanda.vidalNo ratings yet
- ICINCO Vid Ach PozDocument3 pagesICINCO Vid Ach Pozyolanda.vidalNo ratings yet
- IASTED Vid Ach Poz SendedForPeerReviewDocument4 pagesIASTED Vid Ach Poz SendedForPeerReviewyolanda.vidalNo ratings yet
- Robust Control For Variable-Speed Two-Bladed Horizontal-Axis Wind Turbines Via Chattering ControlDocument18 pagesRobust Control For Variable-Speed Two-Bladed Horizontal-Axis Wind Turbines Via Chattering Controlyolanda.vidalNo ratings yet
- Throttle Tracking Poz Ach VidDocument7 pagesThrottle Tracking Poz Ach Vidyolanda.vidalNo ratings yet
- Eulerian SPH Formulation For Large Distortion ProblemsDocument6 pagesEulerian SPH Formulation For Large Distortion Problemsyolanda.vidalNo ratings yet
- Cabinets 15 Inch 125 LDocument3 pagesCabinets 15 Inch 125 LservitecdjNo ratings yet
- UML Activity DiagramDocument13 pagesUML Activity DiagramMuqaddas RasheedNo ratings yet
- Implementing DLMS/COSEM in Smart Meters in Smart Meters: Gordan Štruklec Joško MaršićDocument14 pagesImplementing DLMS/COSEM in Smart Meters in Smart Meters: Gordan Štruklec Joško MaršićRIZ100% (1)
- Ict 7 Week 2Document28 pagesIct 7 Week 2Jhan G CalateNo ratings yet
- Anurag - Hacking With ExpertsDocument128 pagesAnurag - Hacking With ExpertsRavi Chandra Medisetty100% (3)
- ES Assignment 3Document12 pagesES Assignment 3satinder singhNo ratings yet
- Epicor ERP 10.2.500 Installation GuideDocument173 pagesEpicor ERP 10.2.500 Installation Guiderikizalkarnain88No ratings yet
- Analysis of Building Under BlastDocument6 pagesAnalysis of Building Under BlastsjsubinNo ratings yet
- Impact of Technology in Quality of ServiceDocument233 pagesImpact of Technology in Quality of ServiceAlok MishraNo ratings yet
- Zelio Logic SR2B122BDDocument5 pagesZelio Logic SR2B122BDMarcelo Adrian Quintana GutierrezNo ratings yet
- AG188-How To Update The Firmware On Post Mode-En-V1.0-090404Document6 pagesAG188-How To Update The Firmware On Post Mode-En-V1.0-090404joro_sandNo ratings yet
- Fiber Optic Sensors: The New Standard in SimplicityDocument26 pagesFiber Optic Sensors: The New Standard in SimplicityhelenarajNo ratings yet
- RegridDocument20 pagesRegridabi2592No ratings yet
- How To Check Seismic Drift in ETABS - Dennis Mercado's Structural Engineer's BlogDocument5 pagesHow To Check Seismic Drift in ETABS - Dennis Mercado's Structural Engineer's BlogMohammed AshrafNo ratings yet
- Pratibha College of Commerce & Computer Studies: Prospectus 2020-21Document23 pagesPratibha College of Commerce & Computer Studies: Prospectus 2020-21MayurNo ratings yet
- City Vista Office InteriorDocument2 pagesCity Vista Office InteriorNavdeep GopamwarNo ratings yet
- Final Report: Simulation Using Star CCM+ Theory and Practice in Marine CFD BenaoeDocument10 pagesFinal Report: Simulation Using Star CCM+ Theory and Practice in Marine CFD BenaoeRaviindra singhNo ratings yet
- Fisher 2625 Volume Booster SIS Safety ManualDocument4 pagesFisher 2625 Volume Booster SIS Safety ManualWalid FattahNo ratings yet
- ECG200L ENG Rev0Document2 pagesECG200L ENG Rev0vaitheeswaran kumaravelNo ratings yet
- Personnel Gate Pass Application Rev 2aDocument1 pagePersonnel Gate Pass Application Rev 2aKarthik DhayalanNo ratings yet
- USB - OTG - and - EH - 2-0-Version 1 - 1a PDFDocument96 pagesUSB - OTG - and - EH - 2-0-Version 1 - 1a PDFFaux RouxNo ratings yet
- Problem-Solving: Solving Problems by SearchingDocument40 pagesProblem-Solving: Solving Problems by SearchingIhab Amer100% (1)
- Adoptante, Aunhel John M. - Topic 6 TermsDocument4 pagesAdoptante, Aunhel John M. - Topic 6 TermsAunhel John Malinay AdoptanteNo ratings yet
- Traverse SheetDocument61 pagesTraverse Sheetعامري اليNo ratings yet
- Ecdis Familiarization Check List: (For Officer)Document8 pagesEcdis Familiarization Check List: (For Officer)Myint ZawNo ratings yet
- Biamp System Design Guide HealthcareDocument2 pagesBiamp System Design Guide HealthcareohundperNo ratings yet
- AUS Holden Vehicle Communication Software ManualDocument90 pagesAUS Holden Vehicle Communication Software ManualnigilbertoNo ratings yet
- Key Features: DS-D5043QE 42.5" MonitorDocument3 pagesKey Features: DS-D5043QE 42.5" Monitorsamhir mesiasNo ratings yet
- G13mft Totalizer GB PDFDocument75 pagesG13mft Totalizer GB PDFDoicho AndonovNo ratings yet