You might also like
- 1 s2.0 S0045794922001754 MainDocument11 pages1 s2.0 S0045794922001754 MainLonglong GuoNo ratings yet
- Lip-Reading With Densely Connected Temporal Convolutional NetworksDocument10 pagesLip-Reading With Densely Connected Temporal Convolutional NetworksK.M. ARIF-UZ-ZAMANNo ratings yet
- Cite 256 Action Recognition Based On Joint Trajectory Maps Using Convolutional Neural Networks ACM M 2017Document5 pagesCite 256 Action Recognition Based On Joint Trajectory Maps Using Convolutional Neural Networks ACM M 2017姜华为No ratings yet
- Handwriting Recognition With Large Multidimensional Long Short-Term Memory Recurrent Neural NetworksDocument6 pagesHandwriting Recognition With Large Multidimensional Long Short-Term Memory Recurrent Neural Networksoctoparse8No ratings yet
- ULSAMDocument10 pagesULSAMSSCPNo ratings yet
- PSB-RNN: A Processing-in-Memory Systolic Array Architecture Using Block Circulant Matrices For Recurrent Neural NetworksDocument6 pagesPSB-RNN: A Processing-in-Memory Systolic Array Architecture Using Block Circulant Matrices For Recurrent Neural NetworksVidhi DesaiNo ratings yet
- Parallelizing LMU Training 2102.11417Document11 pagesParallelizing LMU Training 2102.11417milan zatrochNo ratings yet
- A Distributed Method of Inter-Cell Interference Coordination (ICIC) Based On Dual Decomposition For Interference-Limited Cellular NetworksDocument4 pagesA Distributed Method of Inter-Cell Interference Coordination (ICIC) Based On Dual Decomposition For Interference-Limited Cellular NetworksTarek Al AshhabNo ratings yet
- Time Series Classification From Scratch With Deep Neural NetworksDocument9 pagesTime Series Classification From Scratch With Deep Neural NetworksSasha NarvaezNo ratings yet
- Deep Cellular Recurrent Network For Efficient Analysis of Time-Series Data With Spatial InformationDocument10 pagesDeep Cellular Recurrent Network For Efficient Analysis of Time-Series Data With Spatial Informationbaltazzar_90No ratings yet
- Feature Fusion Based On Convolutional Neural Netwo PDFDocument8 pagesFeature Fusion Based On Convolutional Neural Netwo PDFNguyễn Thành TânNo ratings yet
- A 64-Tile 2.4-Mb in-Memory-Computing CNN Accelerator Employing Charge-Domain ComputeDocument5 pagesA 64-Tile 2.4-Mb in-Memory-Computing CNN Accelerator Employing Charge-Domain ComputeHelloNo ratings yet
- Operation in Space of Artificial Neural Networks Implemented by Means of A Dedicated Architecture Based On A TransputerDocument4 pagesOperation in Space of Artificial Neural Networks Implemented by Means of A Dedicated Architecture Based On A Transputerwaluyo dosenNo ratings yet
- CNN Interspeech2013 PubDocument5 pagesCNN Interspeech2013 Pubjmanuel.cidpNo ratings yet
- Hardware Complexity Analysis of Deep Neural Networks and Decision Tree Ensembles For Real-Time Neural Data Classi CationDocument5 pagesHardware Complexity Analysis of Deep Neural Networks and Decision Tree Ensembles For Real-Time Neural Data Classi CationSimon linNo ratings yet
- Skeleton-Based Action Recognition With Convolutional Neural Networks Chao Li, Qiaoyong Zhong, Di Xie, Shiliang Pu Hikvision Research Institute, Hangzhou, ChinaDocument4 pagesSkeleton-Based Action Recognition With Convolutional Neural Networks Chao Li, Qiaoyong Zhong, Di Xie, Shiliang Pu Hikvision Research Institute, Hangzhou, ChinaArs Arifur RahmanNo ratings yet
- RTSNetDocument5 pagesRTSNetDamiApacheNo ratings yet
- Laddernet: Multi-Path Networks Based On U-Net For Medical Image Segmentation Juntang Zhuang Biomedical Engineering, Yale University, New Haven, CT, USADocument4 pagesLaddernet: Multi-Path Networks Based On U-Net For Medical Image Segmentation Juntang Zhuang Biomedical Engineering, Yale University, New Haven, CT, USALabDATAM com PanamáNo ratings yet
- LSTM Online Training PDFDocument12 pagesLSTM Online Training PDFRiadh GharbiNo ratings yet
- SISR TransformerDocument10 pagesSISR Transformersahildharme8No ratings yet
- 2012 - Stochastic Gradient Descent Inspired Training Technique For A CMOS Nano Memristive Trainable Threshold Gate ArrayDocument10 pages2012 - Stochastic Gradient Descent Inspired Training Technique For A CMOS Nano Memristive Trainable Threshold Gate Arrayfromthedepth@gmail.comNo ratings yet
- Sag Heer 2019Document19 pagesSag Heer 2019Abimael Avila TorresNo ratings yet
- An Area - and Energy-Efficient Spiking Neural Network With Spike-Time-Dependent Plasticity Realized With SRAM Processing-in-Memory Macro and On-Chip Unsupervised LearningDocument13 pagesAn Area - and Energy-Efficient Spiking Neural Network With Spike-Time-Dependent Plasticity Realized With SRAM Processing-in-Memory Macro and On-Chip Unsupervised LearningPANTHADIP MAJINo ratings yet
- Distributed Beamforming Techniques For Cell-Free Wireless Networks Using Deep Reinforcement LearningDocument16 pagesDistributed Beamforming Techniques For Cell-Free Wireless Networks Using Deep Reinforcement Learningwho3No ratings yet
- Learning in Memristive Neural Network Architectures Using Analog Backpropagation CircuitsDocument14 pagesLearning in Memristive Neural Network Architectures Using Analog Backpropagation CircuitsHussain Bin AliNo ratings yet
- Deepgraphonet: A Deep Graph Operator Network To Learn and Zero-Shot Transfer The Dynamic Response of Networked SystemsDocument10 pagesDeepgraphonet: A Deep Graph Operator Network To Learn and Zero-Shot Transfer The Dynamic Response of Networked Systemsdata scienceNo ratings yet
- Simple Is Good Investigation of History State Ensemble Deep Neu - 2023 - NeurocDocument15 pagesSimple Is Good Investigation of History State Ensemble Deep Neu - 2023 - NeurocSumeet MitraNo ratings yet
- A Simple Way To Initialize Recurrent Networks of Rectified Linear UnitsDocument9 pagesA Simple Way To Initialize Recurrent Networks of Rectified Linear Unitsomonait17No ratings yet
- Continual Learning of Context-Dependent Processing in Neural NetworksDocument18 pagesContinual Learning of Context-Dependent Processing in Neural Networks008 BHAVY SHUKLANo ratings yet
- Energy Efficient Sleep Awake Aware (EESAA) Intelligent Sensor Network Routing ProtocolDocument6 pagesEnergy Efficient Sleep Awake Aware (EESAA) Intelligent Sensor Network Routing ProtocolIramfatimaNo ratings yet
- A Review: An Improved K-Means Clustering Technique in WSN: Navjot Kaur Jassi, Sandeep Singh WraichDocument5 pagesA Review: An Improved K-Means Clustering Technique in WSN: Navjot Kaur Jassi, Sandeep Singh WraichKarthik RNo ratings yet
- Competitive Inner-Imaging Squeeze and Excitation For Residual Network PDFDocument17 pagesCompetitive Inner-Imaging Squeeze and Excitation For Residual Network PDFMistlemagicNo ratings yet
- DLD Research Paper1Document7 pagesDLD Research Paper1lakhanNo ratings yet
- 3098 15835 1 PB 2011 PDFDocument6 pages3098 15835 1 PB 2011 PDFJorge Velasquez RamosNo ratings yet
- An All-Memristor Deep Spiking Neural Computing System A Step Toward Realizing The Low-Power Stochastic BrainDocument14 pagesAn All-Memristor Deep Spiking Neural Computing System A Step Toward Realizing The Low-Power Stochastic BrainbismuthsunilNo ratings yet
- Reducing Energy Consumption in Wireless Sensor NetworksDocument6 pagesReducing Energy Consumption in Wireless Sensor NetworksKeerthi GuruNo ratings yet
- Dropout Improves Recurrent Neural Networks For Handwriting RecognitionDocument6 pagesDropout Improves Recurrent Neural Networks For Handwriting Recognitionfetulhak abdurahmanNo ratings yet
- (Polish Maritime Research) Application of Artificial Neural Networks To Assessment of Ship Manoeuvrability QualitiesDocument7 pages(Polish Maritime Research) Application of Artificial Neural Networks To Assessment of Ship Manoeuvrability Qualitiesjwpaprk1No ratings yet
- A Recurrent Neural Network With Long Short-Term Memory For State of Charge Estimation of Lithium-Ion BatteriesDocument5 pagesA Recurrent Neural Network With Long Short-Term Memory For State of Charge Estimation of Lithium-Ion BatteriesBINITHA MATHEWNo ratings yet
- Efficient Online Learning Algorithms Based On LSTM Neural NetworksDocument12 pagesEfficient Online Learning Algorithms Based On LSTM Neural Networkstys7524No ratings yet
- Mosaic: In-Memory Computing and Routing For Small-World Spike-Based Neuromorphic SystemsDocument12 pagesMosaic: In-Memory Computing and Routing For Small-World Spike-Based Neuromorphic SystemsjoeNo ratings yet
- Efficient Quantized Sparse Matrix Operations On Tensor CoresDocument13 pagesEfficient Quantized Sparse Matrix Operations On Tensor Coresoscar garciaNo ratings yet
- Sun Human Action Recognition ICCV 2015 PaperDocument9 pagesSun Human Action Recognition ICCV 2015 PaperMohit KumarNo ratings yet
- KCP: Kernel Cluster Pruning For Dense Labeling Neural NetworksDocument16 pagesKCP: Kernel Cluster Pruning For Dense Labeling Neural NetworksmuhamarNo ratings yet
- Wireless Image Transmission Using Deep Source Channel Coding With Attention ModulesDocument14 pagesWireless Image Transmission Using Deep Source Channel Coding With Attention ModulesChathurangaNo ratings yet
- Deep Learning With A Classifier SystemDocument9 pagesDeep Learning With A Classifier SystemlarisszaNo ratings yet
- Making Convolutional Networks Recurrent For Visual Sequence Learning (Xiaodong Yang) - CVPR 2018Document10 pagesMaking Convolutional Networks Recurrent For Visual Sequence Learning (Xiaodong Yang) - CVPR 2018ervinonNo ratings yet
- Resiliency of Deep Neural Networks Under QuantizationsDocument11 pagesResiliency of Deep Neural Networks Under QuantizationsGod GamingNo ratings yet
- Rrnns Mckay 2018Document31 pagesRrnns Mckay 2018mmcyoungNo ratings yet
- Feng Liang Et Al - 2021 - Efficient Neural Network Using Pointwise Convolution Kernels With Linear PhaseDocument8 pagesFeng Liang Et Al - 2021 - Efficient Neural Network Using Pointwise Convolution Kernels With Linear Phasebigliang98No ratings yet
- Sensors 22 02459Document18 pagesSensors 22 02459Khánh TrầnNo ratings yet
- Structured Pruning of Deep Convolutional Neural Netw Orks: Sajid Anwar, Kyuyeon Hwang and Wonyong SungDocument11 pagesStructured Pruning of Deep Convolutional Neural Netw Orks: Sajid Anwar, Kyuyeon Hwang and Wonyong Sungali shaarawyNo ratings yet
- Speech Recognition With Deep Recurrent Neural NetworksDocument2 pagesSpeech Recognition With Deep Recurrent Neural Networksskull blankNo ratings yet
- Depth-Gated Recurrent Neural NetworksDocument5 pagesDepth-Gated Recurrent Neural NetworksEric CaceresNo ratings yet
- Nvsim: A Circuit-Level Performance, Energy, and Area Model For Emerging Nonvolatile MemoryDocument14 pagesNvsim: A Circuit-Level Performance, Energy, and Area Model For Emerging Nonvolatile MemorytakahashikeyakiNo ratings yet
- Chord Detection Using Deep LearningDocument7 pagesChord Detection Using Deep LearningD Ban ChoNo ratings yet
- Land Cover Classification Via Multi-Temporal Spatial Data by Recurrent Neural NetworksDocument7 pagesLand Cover Classification Via Multi-Temporal Spatial Data by Recurrent Neural NetworksAnyi BurgosNo ratings yet
- Vesti Energy-Efficient In-Memory Computing Accelerator For Deep Neural NetworksDocument14 pagesVesti Energy-Efficient In-Memory Computing Accelerator For Deep Neural NetworksPANTHADIP MAJINo ratings yet
- Gain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipFrom EverandGain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Icra 17 MedicalDocument7 pagesIcra 17 MedicalVõ TuấnNo ratings yet
- Buckley 1987Document17 pagesBuckley 1987Võ TuấnNo ratings yet
- Symmetry 10 00107 PDFDocument13 pagesSymmetry 10 00107 PDFVõ TuấnNo ratings yet
- AngGhiRid IJCNN10Document9 pagesAngGhiRid IJCNN10Võ TuấnNo ratings yet
- Going To Extremes: Weakly Supervised Medical Image SegmentationDocument18 pagesGoing To Extremes: Weakly Supervised Medical Image SegmentationVõ TuấnNo ratings yet
- Computer Science Review: Arunim Garg, Vijay MagoDocument17 pagesComputer Science Review: Arunim Garg, Vijay MagoVõ TuấnNo ratings yet
- XFNR D 21 00054 - R1Document41 pagesXFNR D 21 00054 - R1Võ TuấnNo ratings yet
- C++ Graph Theory Sample Cheat Sheet: by ViaDocument4 pagesC++ Graph Theory Sample Cheat Sheet: by ViaVõ TuấnNo ratings yet
- Sample Problems On Bar Graph Scales: 1. Employee SalariesDocument4 pagesSample Problems On Bar Graph Scales: 1. Employee SalariesVõ TuấnNo ratings yet
- Certified: Steelfab of VirginiaDocument1 pageCertified: Steelfab of VirginiaRamume188No ratings yet
- Deva Surya - 19MF02Document30 pagesDeva Surya - 19MF02SaravananNo ratings yet
- JCHT35K9 EngDocument5 pagesJCHT35K9 EngRodica PuscauNo ratings yet
- What's The Use of Neuroticism?: G. Claridge, C. DavisDocument18 pagesWhat's The Use of Neuroticism?: G. Claridge, C. DavisNimic NimicNo ratings yet
- Aplikasi Sistem Penuaian Air Hujan (Spah) Di Kawasan PerumahanDocument18 pagesAplikasi Sistem Penuaian Air Hujan (Spah) Di Kawasan PerumahanFarid Che DeramanNo ratings yet
- Catalogue: Packer SystemDocument56 pagesCatalogue: Packer SystemChinmoyee Sharma100% (1)
- Kiss Forex How To Trade Ichimoku PDFDocument72 pagesKiss Forex How To Trade Ichimoku PDFSastryassociates Chartered100% (3)
- BTL Info CNC ProgrammDocument132 pagesBTL Info CNC ProgrammdieulafaitNo ratings yet
- Phytoremediation Acuatic PlantsDocument120 pagesPhytoremediation Acuatic PlantsFranco Portocarrero Estrada100% (1)
- NDTDocument2 pagesNDTRoop Sathya kumarNo ratings yet
- Ge Druck PTX 7535Document2 pagesGe Druck PTX 7535ICSSNo ratings yet
- Nicotine From CigarettesDocument2 pagesNicotine From CigarettesAditya Agarwal100% (1)
- HardikDocument21 pagesHardikGohil HardikNo ratings yet
- Microscope MaintenanceDocument2 pagesMicroscope MaintenanceCharlyn KeithNo ratings yet
- Coastal Management NotesDocument2 pagesCoastal Management Notesapi-330338837No ratings yet
- TA1515VDocument4 pagesTA1515VLeo LeiNo ratings yet
- From Science To God by Peter RussellDocument6 pagesFrom Science To God by Peter RussellFilho adulto pais alcolatrasNo ratings yet
- VAM Must Sumitomo 1209 PDFDocument4 pagesVAM Must Sumitomo 1209 PDFnwohapeterNo ratings yet
- Calabano Clinical Bacteriology Exercise 1Document5 pagesCalabano Clinical Bacteriology Exercise 1MarkJasperCalabanoNo ratings yet
- Ketu in 12th HousesDocument10 pagesKetu in 12th HousesSanket MishraNo ratings yet
- With EU Stage V Engine Installed: 200 HP (149 KW) / 2,200 RPMDocument4 pagesWith EU Stage V Engine Installed: 200 HP (149 KW) / 2,200 RPMSara Sarmiento EcheverryNo ratings yet
- WRP Examination Extension 1 2012Document12 pagesWRP Examination Extension 1 2012Belinda JadeNo ratings yet
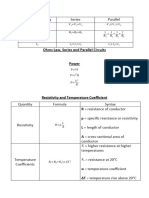
- EET - Formulas - Christmas TermDocument3 pagesEET - Formulas - Christmas TermJMDNo ratings yet
- Adminstration of Intramusclar InjectionDocument3 pagesAdminstration of Intramusclar InjectionDenise CastroNo ratings yet
- 100 Years of Hydrodynamic PDFDocument28 pages100 Years of Hydrodynamic PDFnikodjoleNo ratings yet
- The Explanation of The Fundamentals of Islamic BeliefDocument95 pagesThe Explanation of The Fundamentals of Islamic BeliefbooksofthesalafNo ratings yet
- Wic ReflectionDocument3 pagesWic Reflectionapi-307029735No ratings yet
- AnamnezaDocument3 pagesAnamnezaTeodora StevanovicNo ratings yet
- Web+Presentation+12+July+2016 EA+-+Eric+LumeDocument57 pagesWeb+Presentation+12+July+2016 EA+-+Eric+LumetranthabinNo ratings yet
- Eng Pipe DesignDocument12 pagesEng Pipe DesignEsapermana Riyan100% (1)