You might also like
- Information Systems Notes Cheatsheet VersionDocument2 pagesInformation Systems Notes Cheatsheet VersionMatthewNo ratings yet
- Intro To Encompass LOANDocument54 pagesIntro To Encompass LOANXaysomphone KieNo ratings yet
- Graph Theoretic Methods in Multiagent NetworksFrom EverandGraph Theoretic Methods in Multiagent NetworksRating: 5 out of 5 stars5/5 (1)
- Pseudo-Eyes A Smart Sunglasses For Visually ImpairedDocument65 pagesPseudo-Eyes A Smart Sunglasses For Visually ImpairedMariane CarandangNo ratings yet
- Modern Authentication With Azure Active Directory For Web Applications PDFDocument129 pagesModern Authentication With Azure Active Directory For Web Applications PDFJinish KGNo ratings yet
- Graph Sample and Aggregate-Attention Network For Hyperspectral Image ClassificationDocument5 pagesGraph Sample and Aggregate-Attention Network For Hyperspectral Image Classification黄凌翔No ratings yet
- Yang 20 ADocument16 pagesYang 20 AArielIporreRivasNo ratings yet
- Ijgi 09 00674Document16 pagesIjgi 09 00674Đorđe IvanovićNo ratings yet
- Hierarchical Graph Representation Learning With Differentiable PoolingDocument9 pagesHierarchical Graph Representation Learning With Differentiable PoolingRafael LimaNo ratings yet
- GNN ReviewDocument26 pagesGNN ReviewEaco ShawNo ratings yet
- Graph Neural Networks: A Review of Methods and ApplicationsDocument22 pagesGraph Neural Networks: A Review of Methods and ApplicationsRafael LimaNo ratings yet
- Graph Neural Networks: A Review of Methods and ApplicationsDocument20 pagesGraph Neural Networks: A Review of Methods and ApplicationsTheStupidityOfPplNo ratings yet
- (IJIT-V7I2P8) :D. Jeni Jeba Seeli, Dr.K.K.ThanammalDocument6 pages(IJIT-V7I2P8) :D. Jeni Jeba Seeli, Dr.K.K.ThanammalIJITJournalsNo ratings yet
- Context-Aware Attentional Graph U-Net ForDocument5 pagesContext-Aware Attentional Graph U-Net Forlin mouleNo ratings yet
- Graph Geometry Interaction Learning: Corresponding AuthorDocument11 pagesGraph Geometry Interaction Learning: Corresponding Authorkikag60730No ratings yet
- NeurIPS 2021 Multi View Contrastive Graph Clustering PaperDocument12 pagesNeurIPS 2021 Multi View Contrastive Graph Clustering PaperYijian FanNo ratings yet
- Neural Message Passing On High-Order PathsDocument7 pagesNeural Message Passing On High-Order PathsMaximillian Fornitz VordingNo ratings yet
- Graph Transformer Networks: Corresponding AuthorDocument11 pagesGraph Transformer Networks: Corresponding Authorvadim fustiiNo ratings yet
- An Approch For Representation of Node Using Graph Transformer NetworksDocument13 pagesAn Approch For Representation of Node Using Graph Transformer NetworksIJRASETPublicationsNo ratings yet
- Fusion Graph Convolutional NetworksDocument10 pagesFusion Graph Convolutional NetworksNo12n533No ratings yet
- Chen 22 RDocument21 pagesChen 22 RSicong CaoNo ratings yet
- On An Improvement of Graph Convolutional Network in Semi-Supervised LearningDocument4 pagesOn An Improvement of Graph Convolutional Network in Semi-Supervised LearningThien ThaiNo ratings yet
- Local-Global Fuzzy Clustering With Anchor GraphDocument15 pagesLocal-Global Fuzzy Clustering With Anchor Graphpakardizavand.naserNo ratings yet
- Gat Iclr18Document12 pagesGat Iclr18ExulansisNo ratings yet
- Remotesensing 12 04003 v2Document17 pagesRemotesensing 12 04003 v2TefeNo ratings yet
- Graph Anomaly Detection With Graph Neural Networks Current Status and ChallengesDocument10 pagesGraph Anomaly Detection With Graph Neural Networks Current Status and ChallengesAbhishek KumarNo ratings yet
- 1810 05997 PDFDocument15 pages1810 05997 PDFBlake XiaoNo ratings yet
- 5330-Article Text-8555-1-10-20200508Document8 pages5330-Article Text-8555-1-10-20200508fbao9275No ratings yet
- Raph Ttention Etworks: Work Performed While The Author Was at The Montr Eal Institute of Learning AlgorithmsDocument12 pagesRaph Ttention Etworks: Work Performed While The Author Was at The Montr Eal Institute of Learning Algorithmskai yangNo ratings yet
- Unifying Non-Local Blocks For Neural NetworksDocument10 pagesUnifying Non-Local Blocks For Neural NetworksRonald BbosaNo ratings yet
- 1312.6203 Spectral Networks and Locally Connected NetworksDocument14 pages1312.6203 Spectral Networks and Locally Connected NetworkshongnhNo ratings yet
- Unifying Graph Contrastive Learning With Flexible Contextual ScopesDocument10 pagesUnifying Graph Contrastive Learning With Flexible Contextual Scopesliuyunwu2008No ratings yet
- A State-Of-The-Art Computer Vision Adopting Non - EDocument33 pagesA State-Of-The-Art Computer Vision Adopting Non - ErookyNo ratings yet
- Graph Embedding and ApplicationDocument33 pagesGraph Embedding and ApplicationAnh Vuong TuanNo ratings yet
- Liu 22 SDocument19 pagesLiu 22 SSicong CaoNo ratings yet
- Concentration of Random Graphs and Application To Community DetectionDocument20 pagesConcentration of Random Graphs and Application To Community DetectionPaulo Ney de SouzaNo ratings yet
- NIPS 2017 Inductive Representation Learning On Large Graphs PaperDocument11 pagesNIPS 2017 Inductive Representation Learning On Large Graphs PaperRakesh M BNo ratings yet
- Automated Unsupervised Graph Representation LearningDocument14 pagesAutomated Unsupervised Graph Representation Learningliuyunwu2008No ratings yet
- Entropy: Kernel Spectral Clustering For Big Data NetworksDocument20 pagesEntropy: Kernel Spectral Clustering For Big Data NetworksPiyush SinghNo ratings yet
- A - GNN - Architecture - With - Local - and - Global-Attention - Feature - For - Image - Classification 2Document13 pagesA - GNN - Architecture - With - Local - and - Global-Attention - Feature - For - Image - Classification 2Mustafa Mohammadi GharasuieNo ratings yet
- The Graph Neural Network ModelDocument20 pagesThe Graph Neural Network ModelHet Bhavin PatelNo ratings yet
- Simonovsky Dynamic Edge-Conditioned Filters CVPR 2017 PaperDocument10 pagesSimonovsky Dynamic Edge-Conditioned Filters CVPR 2017 PaperAkshay PratapNo ratings yet
- Physics Aware Difference Graph Networks For Sparsely Observed DynamicsDocument15 pagesPhysics Aware Difference Graph Networks For Sparsely Observed DynamicsAman JalanNo ratings yet
- GNN Edge MaskingpdfDocument21 pagesGNN Edge MaskingpdfLightgreen Liu RanNo ratings yet
- C G N N: Ooperative Raph Eural EtworksDocument22 pagesC G N N: Ooperative Raph Eural Etworksimrankhan.apuNo ratings yet
- Neural Bellman-Ford Networks - A General Graph Neural Network Framework For Link PredictionDocument24 pagesNeural Bellman-Ford Networks - A General Graph Neural Network Framework For Link Predictiontimsmith1081574No ratings yet
- 2020 - Line Hypergraph Convolution Network - Bandyopadhyay Et AlDocument13 pages2020 - Line Hypergraph Convolution Network - Bandyopadhyay Et AlBlue PoisonNo ratings yet
- Karaaslanli 22 ADocument11 pagesKaraaslanli 22 ASicong CaoNo ratings yet
- 代表性期刊论文Document20 pages代表性期刊论文zhaoqc418No ratings yet
- Nerf Paper IA 3DDocument8 pagesNerf Paper IA 3DgenialNo ratings yet
- Capturing Fine-Grained Semantics in Contrastive Graph Representation LearningDocument9 pagesCapturing Fine-Grained Semantics in Contrastive Graph Representation Learningliuyunwu2008No ratings yet
- An Integration Model Based On GraphDocument12 pagesAn Integration Model Based On Graphnithin reddyNo ratings yet
- MCMC Sampling of Directed Flag Complexes With Fixed Undirected GraphsDocument35 pagesMCMC Sampling of Directed Flag Complexes With Fixed Undirected GraphsDaniele MarconiNo ratings yet
- Orion: Shortest Path Estimation For Large Social GraphsDocument9 pagesOrion: Shortest Path Estimation For Large Social GraphsxkjonNo ratings yet
- Representation Learning On Graphs MethodsDocument24 pagesRepresentation Learning On Graphs MethodsVishal D MishraNo ratings yet
- Heterogeneous Data Fusion Considering Spatial CorrDocument32 pagesHeterogeneous Data Fusion Considering Spatial CorrSamuele TesfayeNo ratings yet
- Remote SensingDocument20 pagesRemote Sensingvrp bkpNo ratings yet
- 2106 - GraphiT Encoding Graph Structure in TransformersDocument20 pages2106 - GraphiT Encoding Graph Structure in TransformersMiltonNo ratings yet
- Real-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationDocument6 pagesReal-Time Semantic Slam With DCNN-based Feature Point Detection, Matching and Dense Point Cloud AggregationJUAN CAMILO TORRES MUNOZNo ratings yet
- Scene Graph Generation With Hierarchical ContextDocument7 pagesScene Graph Generation With Hierarchical ContextstutinahujaNo ratings yet
- A Multiple-Chaotic Approach For SteganographyDocument29 pagesA Multiple-Chaotic Approach For SteganographyZahirNo ratings yet
- I G: U S - G - L R L M - I MDocument16 pagesI G: U S - G - L R L M - I MvikNo ratings yet
- Landslide Susceptibility Prediction Using Sparse Feature Extraction and Machine Learning Models Based On GIS and Remote SensingDocument5 pagesLandslide Susceptibility Prediction Using Sparse Feature Extraction and Machine Learning Models Based On GIS and Remote SensingducksgomooNo ratings yet
- Mesh Generation: Advances and Applications in Computer Vision Mesh GenerationFrom EverandMesh Generation: Advances and Applications in Computer Vision Mesh GenerationNo ratings yet
- DCN Unit - 1Document118 pagesDCN Unit - 1Rohan SaiNo ratings yet
- Chennai SBI Branches Details PDFDocument6 pagesChennai SBI Branches Details PDFsangeethaNo ratings yet
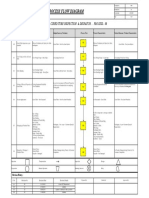
- Process Flow Diagram: Area: Cured Tube Inspection & Despatch Process - 08Document1 pageProcess Flow Diagram: Area: Cured Tube Inspection & Despatch Process - 08aslamNo ratings yet
- Dynamic QR code User guideDocument7 pagesDynamic QR code User guidevinil vkNo ratings yet
- GLC Opr PDFDocument166 pagesGLC Opr PDFmanmathancellamNo ratings yet
- Meisongmao Industrial Co., LTD Profile PDFDocument10 pagesMeisongmao Industrial Co., LTD Profile PDFMalina MaNo ratings yet
- Modul 2.02Document21 pagesModul 2.02izzatul islamNo ratings yet
- POLY BAGS-From KatrinaDocument17 pagesPOLY BAGS-From Katrinabatsy4evNo ratings yet
- Smartphone User Behaviour Predication Using AIDocument9 pagesSmartphone User Behaviour Predication Using AIIJRASETPublicationsNo ratings yet
- Wiring Indorama CP1Document1 pageWiring Indorama CP1Eri Wanto SihombingNo ratings yet
- Testing Strategies OoadDocument3 pagesTesting Strategies OoadSwetha Naik0% (1)
- Load Check BIZHUB 601 - 751Document9 pagesLoad Check BIZHUB 601 - 751DwiHandNo ratings yet
- J.P. INSTRUMENTS EDM-730 ENGINE MONITORING SYSTEM - Aircraft Spruce (2017)Document3 pagesJ.P. INSTRUMENTS EDM-730 ENGINE MONITORING SYSTEM - Aircraft Spruce (2017)ПетрNo ratings yet
- Excavation and Footing LayoutDocument1 pageExcavation and Footing LayoutSandeep VarmaNo ratings yet
- Available Through: Manufactured byDocument4 pagesAvailable Through: Manufactured byAndres Suarez VillarragaNo ratings yet
- Rajalakshmi Engineering CollegeDocument2 pagesRajalakshmi Engineering CollegeBulky MoniNo ratings yet
- (BS-IEMC) Program SpecificationDocument13 pages(BS-IEMC) Program SpecificationADonutReadingNo ratings yet
- Bu - Mechanical RegulationsDocument4 pagesBu - Mechanical RegulationsONA, Melizza Anne C.No ratings yet
- PB SeriesDocument108 pagesPB SeriesGerman LiernurNo ratings yet
- UNIT III Building Aneka CloudsDocument15 pagesUNIT III Building Aneka CloudsMadhu YarruNo ratings yet
- Expert Systems With Applications: Sanjeev Jha, Montserrat Guillen, J. Christopher WestlandDocument8 pagesExpert Systems With Applications: Sanjeev Jha, Montserrat Guillen, J. Christopher WestlandmahmutNo ratings yet
- CV AshutoshDocument2 pagesCV AshutoshAshutoshNo ratings yet
- Gas Mixer MM Flex UsaDocument2 pagesGas Mixer MM Flex UsaManuk ElfarukNo ratings yet
- PTP-HR-FO-G-0545 Application For Staff EmploymentDocument4 pagesPTP-HR-FO-G-0545 Application For Staff EmploymentRj yuraNo ratings yet
- Class Test 2Document1 pageClass Test 2Supriya kumariNo ratings yet
- Internet and Intranet (Ctevt)Document63 pagesInternet and Intranet (Ctevt)Saurav techNo ratings yet